水电站清污机大车定位系统设计
2021-12-12刘仁武谢智峰
刘仁武 谢智峰




摘要:系统主要通过水电站清污机大车桁架与对称式双筒液压减震器的装配,以及大车在行驶过程中液压减震器与清污孔口位置处限位座的接触,来达到大车减速至准确停止在限位座处来进行清污的目的。该定位系统主要利用了液压减震器的阻尼特性,同时考虑到液压减震器在水平放置下也具有较稳定的工作特性,然后通过液压减震器的压缩行程和伸张行程的不同阻尼力以达到大车减速运动过程的稳定工作特性。解决了目前还在应用人工操作式清污机的水电站在清污机大车定位上需要有人值守、人工定位时间过长、定位效率低等问题,是一套非常实用并简便的控制系统,很大程度上提高了水电站的清污效率。
关键词:清污机;限位座;减震器;阻尼
引言
清污机作为一种大型机械行车,按照一定的生产工艺制造出来,其目的是为了在轨道上保持一种“走—停车对正—清污操作”的一种工作状态,但由于清污机结构庞大,操作流程复杂,导致其在实际工作过程中与理论工作状态有很大误差,尤其清污机质量较大导致其惯性偏大,在实际人工操作中会带来很大的停车定位误差,严重影响着清污机清污效率,并且由于清污机短时间内的频繁使用都会导致车身本身的振动较大,给人工停车产生很大的影响。争对这样的问题,结合各国相关技术人员在行车定位上不断的探索和研究,设计一套基于液压减震器的定位系统有着非常高的借鉴和使用价值。
1 定位系统硬件构成
1.1清污机大车组成及其工作过程
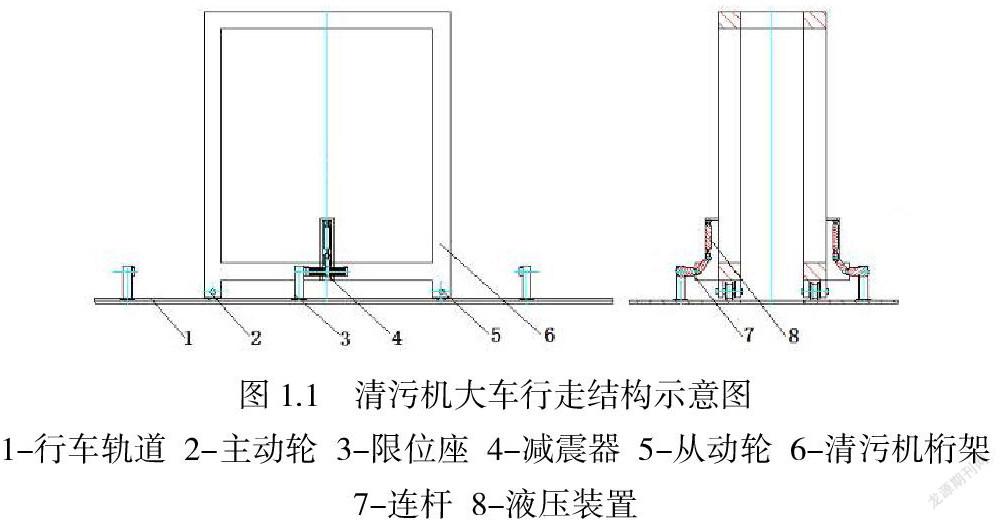
大车的行车结构主要由驱动电机以及主动轮、从动轮以及限位装置组成,其中驱动电机采用2组功率为4kw且装有5档速度可调的施耐德变频器来控制大车行车机构的运行,主动轮和从动轮采用材料为ZG430-640的铸钢来提高车轮表面的耐磨强度和寿命,限位装置主要由行程限位开关也叫接近开关和缓冲器组成,行程限位开关的目的是使驱动电机发生断电然后大车在自由滑行状态下与缓冲器接触使大车停止在适当位置。
1.2对称式双筒液压减震器与大车的装配
如下图1.2所示,大车与对称式双筒液压减震器的装配主要是通过V型连杆和液压装置连接起来,连杆的一端与减震器中端连接,中端与转动中心的定位销连接,末端与活塞杆连接,主要的工作过程就是当大车行驶至下一个清污孔口前,液压装置发生动作(未动作是指活塞杆在最底端)即活塞杆往上推使连杆转动以确保减震器向横梁外侧运动,然后使其与限位座接触来确保大车的减速以及停车。
1.3 限位座结构设计及其位置选取
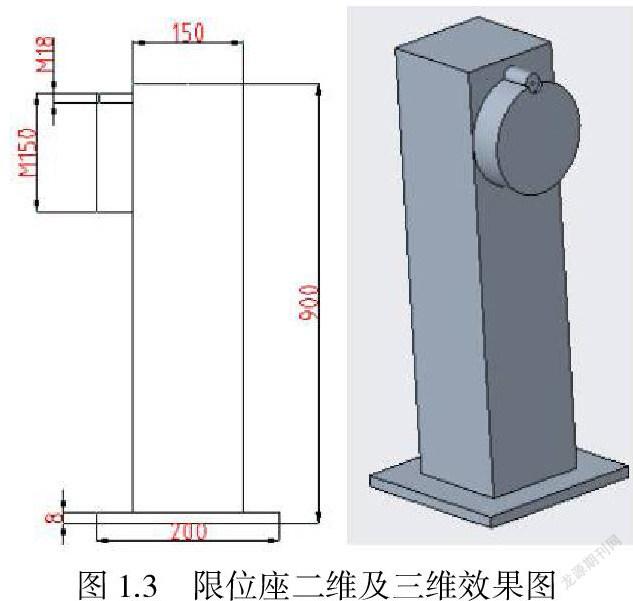
限位座主要采用成本低廉硬度较高的35CrMo合金结构钢,其结构外观设计如下图1.3所示,底座直接与地接触并通过螺栓和螺母与地面装配并固定,其上方与减震器接触这一侧采用圆形结构的合金钢与主体焊接,同时装有5厘米厚的高橡胶缓冲垫(图中未画出)来降低其磨损度,减缓其大车对限位座的冲击力以降低限位座带来的疲劳损坏。
1.4 接近开关位置的选取以及工作过程
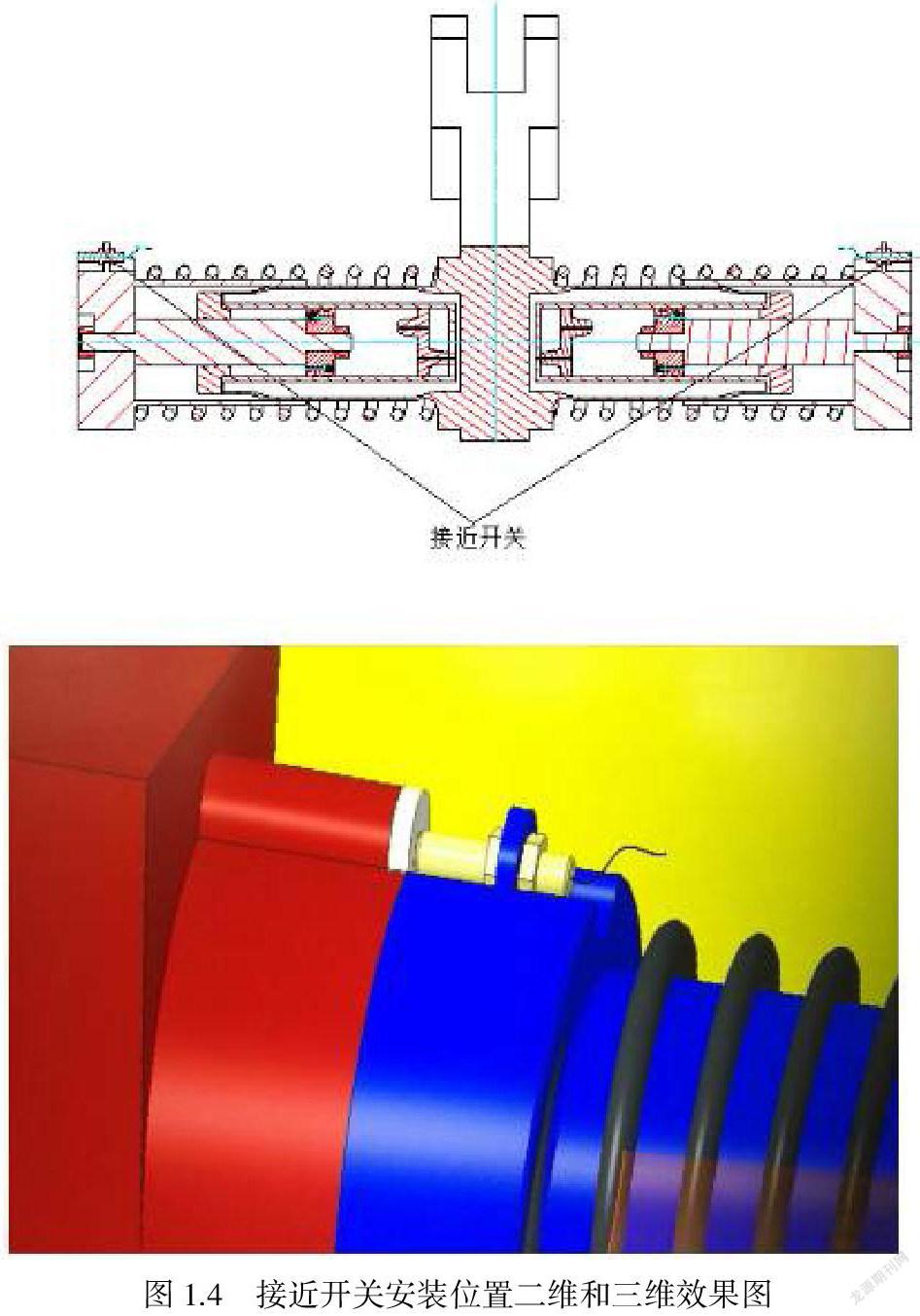
接近开关也叫限位开关应采用电容式传感器共俩个,分别为直流三线制常闭型与常开型,其感应的物体为非金属,检测距离为1-10mm,主要控制驱动电机的通断来节省电源和减少人工操作的不稳定性。在本文应用中为了确保接近开关工作的稳定性而减少外界的干扰,选用的感应距离为4mm和8mm,其中常开型为8mm,常闭型为4mm,其位置安装如下图1.4所示。
2 定位系统的设计与分析
2.1 定位系统方案设计
本定位系统的方案设计如下图2.1所示,以开环控制为例,其中大车在运行时所处的位置作为输入量,用于驱动电机电源通断的接近开关作為控制器,执行器这里即可以指执行初始定位工作的驱动电机,也可以是指完成主要定位工作的对称式双筒液压减震器,轨道车作为被控对象,输出量就是大车减速后自然停止的指定位置。
2.2 定位系统流程
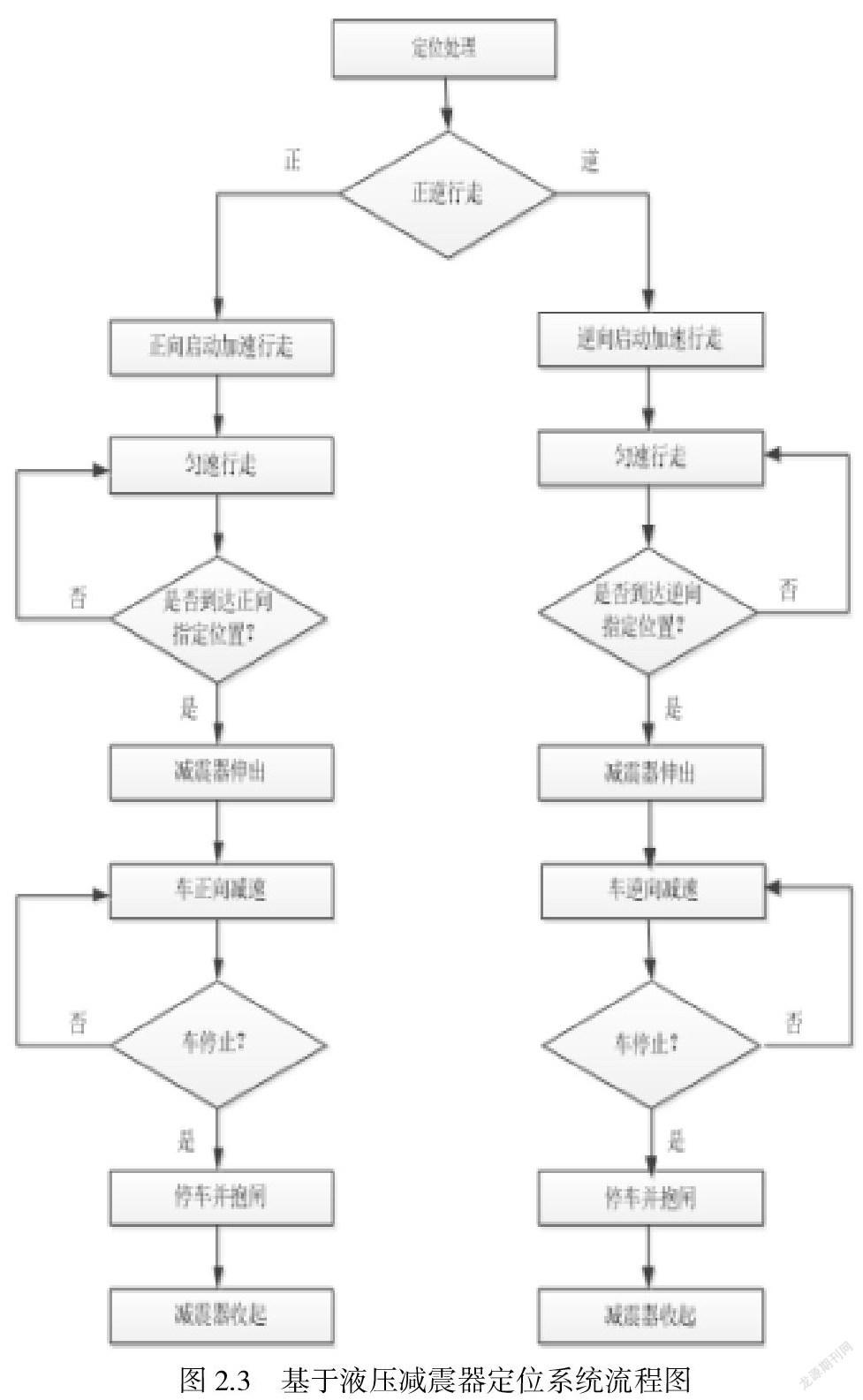
定位系统流程如下图2.3所示,其工作原理及其工作过程可归纳出以下几点:
(1)首先由驾驶室操作人员确定大车行驶的正逆方向,启动正向或反向驱动电源。
(2)当大车行驶至所需清污孔口前的上一孔口位置处,启动液压装置电源来使减震器伸出。
(3)随着大车的行驶,减震器不断与限位座靠近,接近开关发生动作动作,此时驱动电机断电,大车进入自由滑行的初始状态,接下来减震器与限位器接触,减震器压缩,大车在合适的阻尼力下减速运行并稳定停止。
(4)当大车完全停止后,大车会在减震器弹簧反弹的作用力下对大车进行逆向的推动,但是由于减震器里面伸张阀的存在会阻止弹簧的还原,但同时要保证减震器收起后弹簧又会慢慢还原,因此可以归纳出如下图2.2所示的简单力学示意图。
(5)当清污机完成该孔口的清污工作时,减震器会在液压装置的控制下进行收起,上图2.2所示减震器会在伸张阀阻尼作用下慢慢的伸张还原至原先状态以进行下一个清污孔口的清污工作。
2.3 定位系统可靠性分析
本文系统设计就是使感应和制动技术在大车定位的运用进行一定的优化和改进,为了达到提高定位的准确性来降低全自动化控制对大车定位的控制误差以及控制程序的繁琐的目的。减震器首先是运用于汽车或者大型机械车的行车减震作用,因此其承受的荷载大小以及其本身使用的性质完全适用于本文在水电站进行清污工作的清污机的减速作用,有区别的是减震器在平常的运用中所受的力为垂直荷载,而在本文中的运用是水平荷载,但并没有改变减震器的使用性质。且比较重要的一点是可对减震器的阻尼力进行设计即只需调节压缩阀以及伸张阀阀片的弯曲度来改变阻尼力的大小,同时弹簧的弹性系数也可以选取,因此在对于在低速运动下的清污机进行阻尼减速作用时比较合适的,其可靠性较高且应用简便,尤其其较低的应用成本相对其他定位技术有较大的优势,且非常适合当前水电站清污机还处于不断优化下的人工定位操作。
3 定位系统指示装置
3.1接近开关动作指示灯设计以及工作原理
接近开关在本文的运用中主要实现对驱动电机的控制,如下图3.13所示,其中驱动电机所接电源为交流220V,在下图中简单以AC表示,M代表驱动电机,FU为熔断器作用就是保护电机防止电机使用中出现电流过大以致损坏电机,SQ1和SQ2为接近开关,其中为SQ1常闭型,SQ2为常开型,SB为启动按钮开关,KM为接触器,KT为时间继电器,SKT为时间继电器的动作开关,指示灯为动作指示装置用来提醒驾驶室操作人员以及现场工作人员。
其主要工作过程可以归纳出以下几点:
(1)当大车开始工作时,驾驶室操作人员摁下启动按钮SB使大车开始加速并匀速行走,当大车行驶到指定位置时减震器伸出,减震器慢慢靠近限位座时,处于减震器边缘位置的接近开关SQ1和SQ2与限位座上的感应物体接触并使接近开关发生动作。
(2)接近开关动作时,先是SQ1断开,驱动电机断电,而后在短时间内SQ2闭合,该时间可以忽略不计,当然俩接近开关动作间隔时间的设定取决于俩接近开关相对于感应物体的距离以及安装的位置,上文中暂且只画出单个接近开关的位置,另一接近开关可放置在减震器下方感应距离的设定已在前文指出。
(3)此时时间继电器KT接通电源且开关SKT处于延时断开工作状态,同时指示灯亮起,时间继电器延时工作的时间设定值可通过下文计算得出。当减震器工作完后使大车完全处于静止状态时,时间继电器动作开关SKT开始断开,指示灯熄灭。这样一来大车完成一次基本的定位操作可以很清晰的通过该电路图指示出来,有较高的运行可靠性。
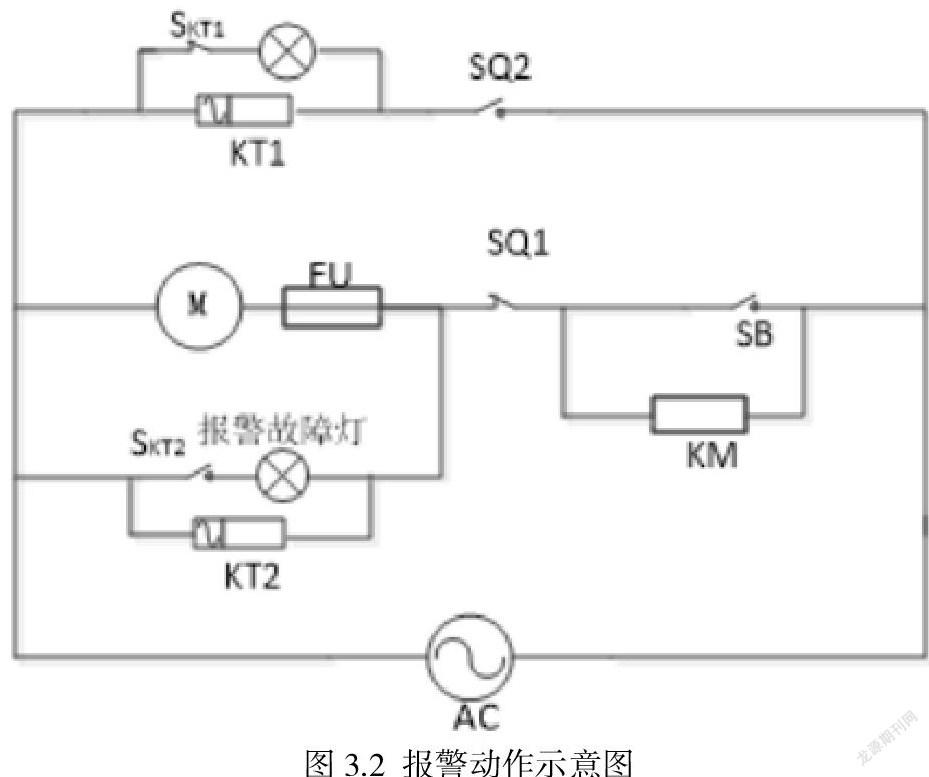
3.2 报警指示灯設计以及工作原理
如下图3.2所示,其中KT1和KT2分别为俩动作时间不一样的时间继电器,且KT1为延时断开,而KT2延时闭合,其中SKT1和SKT2为对应的动作开关。
其主要工作过程就是当启动开关SB后,大车开始行驶,时间继电器KT2接通电源开始进入延时闭合工作,时间的设定取决于大车启动到减震器开始投入工作所需的时间而定,当减震器开始工作时此时如果SQ1和SQ2其中任意一个未介入工作,则继电器SQ1此时就会介入工作,SKT2会在设置好一定的延时时间后开始闭合,此时报警故障灯响起提示驾驶室操作人员,此时驾驶室操作人员应断开驱动电机电源启动按钮SB,则大车依然还会继续在稳定的工作状态下进行减速停车定位。
4 总结
本文介绍了清污机大车定位系统的设计以及具体的工作过程,主要体现出对称式双筒液压减震器在本文应用中相对于其他定位技术所体现的定位优势,其结构简单,操作简便,成本较低,尤其其较高的应用性是减震器在本文定位系统设计中比较独特的一点。当然还有一些问题还待解决,如该设计下的减震器外观的结构所形成的其重量是否会对原先在轨道上运行的大车行驶稳定性产生影响,还有定位中接近开关的动作可靠性还需更多的实验数据等。
参考文献
[1]刘磊磊. 轨道车定位系统设计[D].沈阳工业大学,2013.
[2]沈瑜平.冷轧厂天车(行车)定位及智能导航系统[J].冶金自动化,2015,39(01):80-84.
[3]胡绪红,饶平波.基于PLC的移动式清污机控制系统设计[J].电子技术与软件工程,2013(14):107-108.
[4]张旭. 双向减震器的结构及特性研究[D].大庆石油学院,2007.
基金项目:江西科技学院自然科学课题(ZR1906)
作者简介:
刘仁武,男,助教,硕士,研究方向为汽车制动。
谢智峰,男,助教,硕士,研究方向为大数据技术应用。