变电站巡检机器人路径的人工鱼群算法规划
2021-12-09包清华
赵 岩, 包清华
(黑龙江科技大学 电气与控制工程学院, 哈尔滨 150022)
0 引 言
变电站作为输配电过程的重要一环,在保证电力系统正常工作和安全运行的同时,也要为其内的电气设备运行提供安全保障,防止其出现电力事故[1-2]。因此,对变电站内的设备执行周期的巡检尤为必要。变电站的巡检大多依靠人工来执行,人工巡检时工作效率低,会受到恶劣环境和天气的限制,具有一定的危险性[3-4]。但随着智能化电网的提出,越来越多的变电站应用巡检机器人来完成变电站电气设备的检查工作,这样既提高了巡检效率,又不会受到恶劣环境和天气的影响,还保障了安全性[5]。
将巡检机器人应用于变电站的设备巡查关键就是对巡检路线的规划,这是保证巡检效率和顺利完成检测设备的基础[6]。众多国内外研究人员就巡检机器人如何选择和规划出最优的巡检路径指明了一些方案,张营等[7-8]提出模糊控制算法和Hopfield神经网络,解决了在规划路径时对环境依赖性强的问题,但是有部分规划出的路径不合理,仅考虑了巡检点之间的直接连接,而未考虑到设备所处位置的影响。路浩等[9]针对机器人在巡检过程中有着路网限制和频繁启停能耗大等不足,提出以图论法建模,以最短耗时为目标,结合改进蚁群算法和贪婪思想得到巡检的最优路径,但是该优化算法也存在不足之处,可能会出现最优解不是全局最优。刘胜等[10]提出了一种改进蚁群-粒子群算法用于变电站巡检机器人的路径规划,该方法有很好的收敛速度,也可以防止规划时陷入局部最优,但是存在最优路径冗长的问题。王坤[11]给出了一种栅格方法进行环境建模,利用蚁群算法进行变电站巡检的路径规划,可以找到巡检的最优路径,但存在搜索时间过长的不足。薛阳等[12]针对变电站的特殊巡检提出了一种改进蚁群-蜂群融合算法,该法可以很好地应用于大型复杂变电站的巡检路径规划,但是对于小型结构简单的变电站巡检存在巡检时间偏长的不足,而且该方法并未对变电站的日常常规巡检进行可行性研究。
基本人工鱼群算法在解决路径规划问题时有着很好全局寻优能力,不需要详细的机理模型,但也存在着规划路径时寻优精度不高,易进入局部最优和后期收敛速度慢等不足。针对该问题笔者提出了一种基于栅格法建立环境模型,利用改进的人工鱼群算法实现巡检机器人的巡检路线规划方法。
1 巡检环境模型的创建
1.1 栅格地图
通过栅格法和巡检环境构建基本的地图模型,其是将变电站的环境变换为巡检机器人能够认识的数学语言,也是区分环境中能行驶的巡检区域和电气设备区域。采用栅格法将机器人工作的实际三维环境转换成二维平面环境,以面积相同,大小合适的栅格分隔二维平面各工作区域[13]。以平面建立坐标系,其中,黑色栅格代表电气设备所在区域,白色栅格代表能走动的区域。划分标准是采用二进制数0和1表示不同的区域,由于栅格法建模简单快捷,而且用栅格法建立环境更加贴近实际,可以较好反映出电气设备所在的位置,为了更加贴近实际一般会在电气设备的实际边界的基础上增加一个电气绝缘的安全距离。以图1 220 kV变电站为例,考虑实际的变电站情况,除了有高压电气设备,还应该将变电站中的警示牌、围栏、草坪、绿化带、沟壑等考虑在内,将其转化为栅格图中的其他障碍物。栅格地图如图2所示。
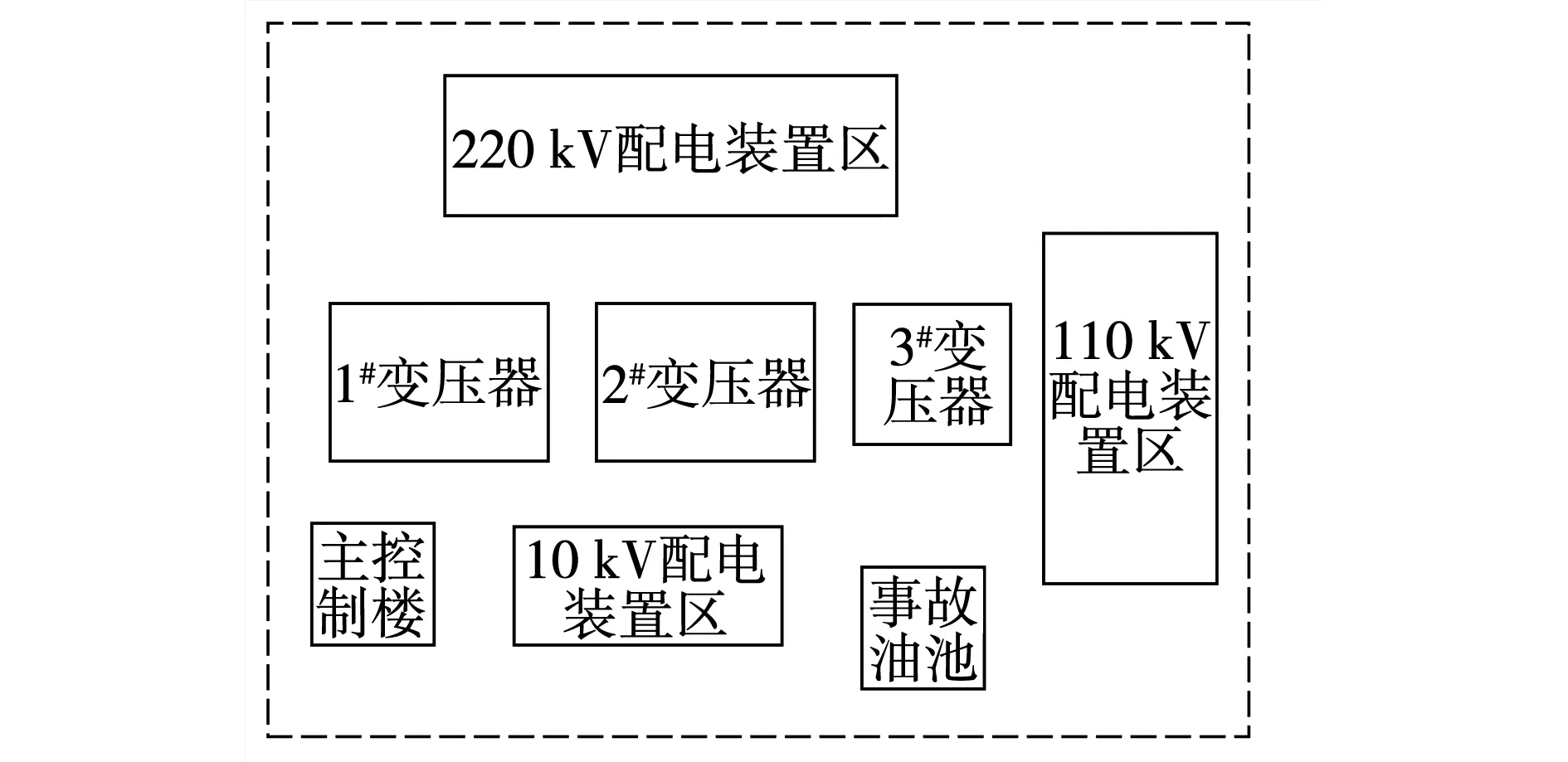
图1 变电站装置区分布Fig. 1 Distribution map of substation area
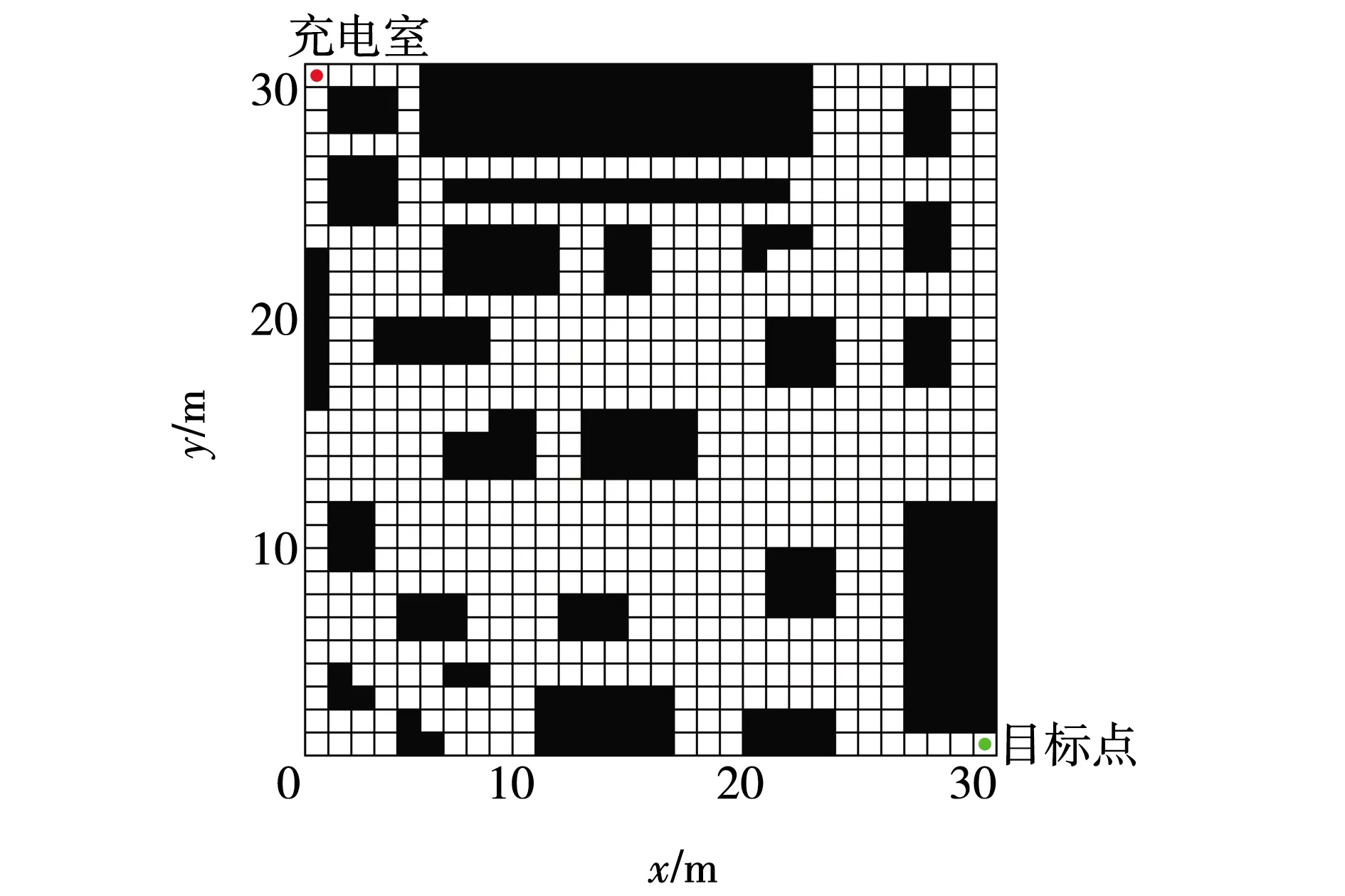
图2 栅格模拟地图Fig. 2 Grid simulation map
如何对创建的栅格模拟地图进行标识,分为序号法和直角坐标法,文中采用的是序号法[14]。序号法就是将原点栅格标号为1,然后按照从下向上、从左至右的顺序对栅格依次标号,如图3所示。此外,文中所指的位置点是根据行列关系来标注的,如(14,1)表示的是第14行第1列的位置。

图3 栅格标号示例Fig. 3 Grid label example
根据实际情况,人工鱼群算法在栅格地图环境下的适用性,巡检机器人的可移动方向是8个,分别是上、下、左、右、上左、上右、下左、下右,如图4所示。机器人仅能在白色栅格之间行走,不可以跨越或碰撞到黑色栅格代表的电气设备。

图4 可运动的方向Fig. 4 Moving direction
另外,在栅格环境中的人工鱼群算法,如果人工鱼的当前位置状态为(xi,yi),目标位置状态为(xg,yg),则寻优标准函数为
(1)
式(1)是以食物浓度的大小作为计算巡检路线长短的标准。
1.2 巡检类型
巡检机器人主要是对其所在变电站进行常规巡检和特殊巡检。常规巡检是指正常情况下每天日常检测,确保电力系统的安全稳定运行。特殊巡检是指在特殊情况下,机器人可以从当前所处的位置到达指定的电气设备处进行巡视检测[15]。特殊巡检分为单一设备巡检和多设备巡检。
2 人工鱼群算法的巡检路线规划
2.1 人工鱼群算法
将人工鱼的个体状态用向量X=(x1,x2,…,xn)表示,其中,xi(i=1,2,…,n)则是指每条要寻优的人工鱼,鱼群的数量为N,Y=f(X)为当前人工鱼所处位置的食物浓度,也就是目标函数值。此外,用v代表人工鱼的视野范围,s代表人工鱼移动的最大步长,δ代表着拥挤度因子的大小,nt是人工鱼的最大实验次数,|Xj-Xi|指的是第j条人工鱼和第i条人工鱼之间的欧氏距离[16]。
(1)觅食行为 设人工鱼的当前位置状态为Xi,对应食物浓度为Yi,在它的视野范围内通过随机搜索找到一个新的位置状态Xj,对应食物浓度为Yj、Xj的确定方式为
Xj=Xi+vRand(0,1)。
(2)
如果Yj>Yi,并且是在最大实验次数nt内找到的,则表明搜索到的新位置状态要比当前位置状态更优,人工鱼就会向前移动一步,有
(3)
如果在最大实验次数内未找到比当前位置状态更优的状态,则会执行随机行为。
(4)
若食物量和空间上的情况相反则会去执行觅食行为。
(3)追尾行为 记人工鱼的当前状态为Xi,搜寻当前邻域内(dij
(5)
否则,同样执行觅食行为。
(4)随机行为 随机行为是鱼类最基本的一种行为,可以大面积地寻找伙伴或食物,可以有效避开局部最优[17]。随机行为实现较为简单,就是在视野中随机选择一个状态,然后向该方向移动,它只是觅食行为的一个缺省行为,有
(6)
2.2 改进人工鱼群算法
在基本人工鱼群算法中,鱼群的视野范围以及拥挤度因子都是提前设定好的固定值,存在全局优化时精度不高,容易陷入局部最优,在算法后期收敛速度慢等问题。文中提出改进视野和拥挤度因子函数,引入转换因子解决此问题。
在基本人工鱼群算法中,当鱼群视野较大时,有利于前期信息的大规模搜索,但是不利于算法后期对所获信息进行快速收敛;反之,小视野不利于前期大规模搜索,但有利后期的小规模搜索并加快收敛。鱼群视野范围的选取应该遵循先大后小的原则,为此,通过引入一个动态视野函数来优化视野参数:
(7)
式中:vin——视野初始值;
t——当前迭代次数;
nmax——最大迭代次数;
λ——调整系数。
式(7)可以保证随着算法的运行,鱼群的视野会相应的缩减,保障大范围搜索下的全局寻优和精确度,以及收敛速度。
算法中拥挤度因子的设定应该遵循先小后大的原则,这样可以保障在利用人工鱼群算法进行路径规划时,前期能够分散搜索,不易陷入局部最优,后期更易于向目标位置收敛,从而找出最优路径。实现方法是引入基于泊松方程的拥挤度因子函数,即
(8)
式中,δin——拥挤度因子初始值。
式(8)随算法的运行,保证了拥挤度因子前期小后期大,进而保障了分散搜索与收敛速度。引入转换因子θ,设置一个觅食行为执行的最大次数,一旦达到最大执行次数就转换为去执行聚群行为、追尾行为,择优选择,这样既可以防止进入局部最优,也可以加快算法收敛速度。
算法执行步骤如下:
(1)输入环境数据,生成环境地图模型,即划分出可行域和电气设备所在的障碍域以及确定机器人行走的起点和目标点。
(2)设定人工鱼群初始参数,即鱼群规模N、人工鱼视野vin、拥挤度因子δin、最大移动步长s、最大实验次数nt、最大迭代次数nmax和转换因子θ。
(3)在给定的环境条件下初始化鱼群。
(4)经过初始化后,鱼群根据所处当前位置状态选择执行觅食行为、聚群行为和追尾行为,评价执行结果,选择最优行为执行。若都不满足,则执行随机行为,随着迭代次数的增加,相应变化视野和拥挤度因子的大小。
(5)执行完鱼群选择的行为后,检验自身位置状态,若优于当前,则需要进行数据的更新。
(6)判断是否达到了最大迭代次数,若达到了,则输出最优路径;否则,迭代次数变为g=g+1,返回第(4)步。
3 常规与特殊巡检的仿真
首先设置巡检机器人运动的环境为30 mm×30 mm的栅格地图,基本人工鱼群算法设置参数:起点的设置也就是充电室的位置是位于(30,1),目标点会因巡检类型的不同略有差异,在常规巡检时起点也就是终点,而特殊巡检是指定位置点。人工鱼的数量N=50,视野v=20,最大实验次数nt=8,拥挤度因子δ=0.618,最大迭代次数nmax=100。改进人工鱼群算法的参数设置视野初值vin=30,拥挤度因子δin=0.01、θ=8,其他参数无变化。
3.1 常规巡检
常规巡检是指巡检机器人每天都要进行的日常巡检工作,即让机器人从充电室出发,历遍变电站内所有的电力设备,最终返回充电室[18]。首先设置好需要巡检的任务点,当系统下发巡检任务时,利用人工鱼群算法规划出一条能从充电室出发经历每个需要检测的任务点,当所有任务都检测完毕后再回到充电室。将此过程通过人工鱼群算法来实现,以栅格模拟环境为背景进行仿真,同时,将基本人工鱼群算法与改进人工鱼群算法作对比,仿真结果如图5所示。图中,三角形标识是机器人所要巡检的任务点。
由图5可见,基本人工鱼群算法在常规巡检中会出现短暂陷入局部最优的情况,导致路径的长度和运行时间增加,但是改进的人工鱼群算法可以很好避免这个问题。算法对比结果如表1所示。
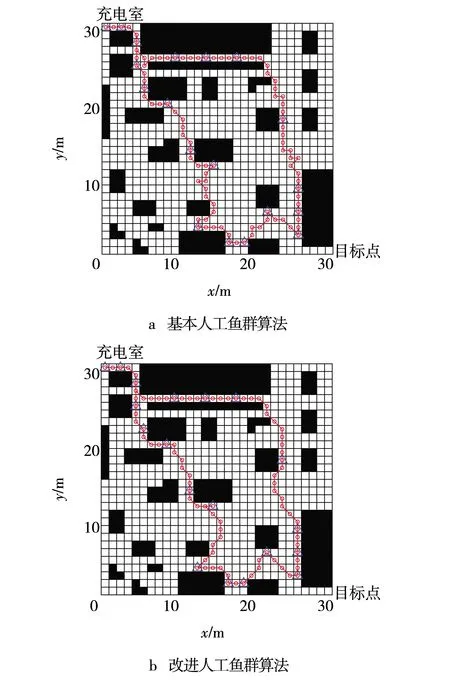
图5 常规巡检路径规划Fig. 5 Routine inspection route planning
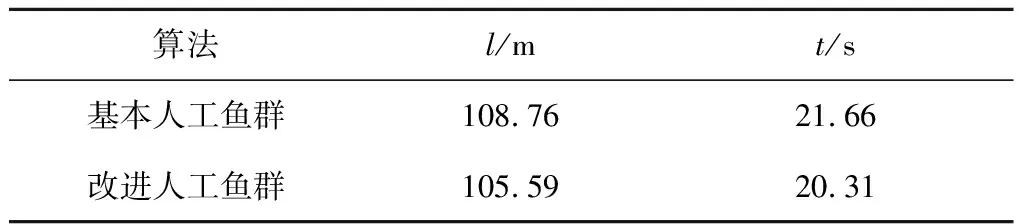
表1 常规巡检路径长度和算法运行时间对比
3.2 特殊巡检
特殊巡检就是在特殊情况下,即对一些容易受温度、强电场、强磁场干扰的设备或者经常处于高负荷运行的设备,必须要求机器人对这类设备给予高度重视,需要频繁的巡视检查[19]。提前设置好需要机器人去巡检的设备点,再将这些设置好的巡检设备点虚拟到栅格环境地图中,然后机器人就可以通过运行人工鱼群算法快速自主寻找到一条可以经过所有需要被巡视的点的最佳路线。在此处将特殊巡检分为单一设备巡检和多设备巡检两种方式进行仿真。
3.2.1 单一设备巡检
单一设备巡检是指当某个设备处于用电高峰期,即长时间处在一个高负荷运行状态,又或是新加入运营的设备要着重关注时,需要进行定期巡检[20]。设置的基础参数与常规巡检参数相同,但是巡检的电气设备点更换成一个,即充电室为运动的起点,终点为要巡检的设备点,此处设置为(1,30),仿真结果如图6所示。算法对比结果如表2所示。
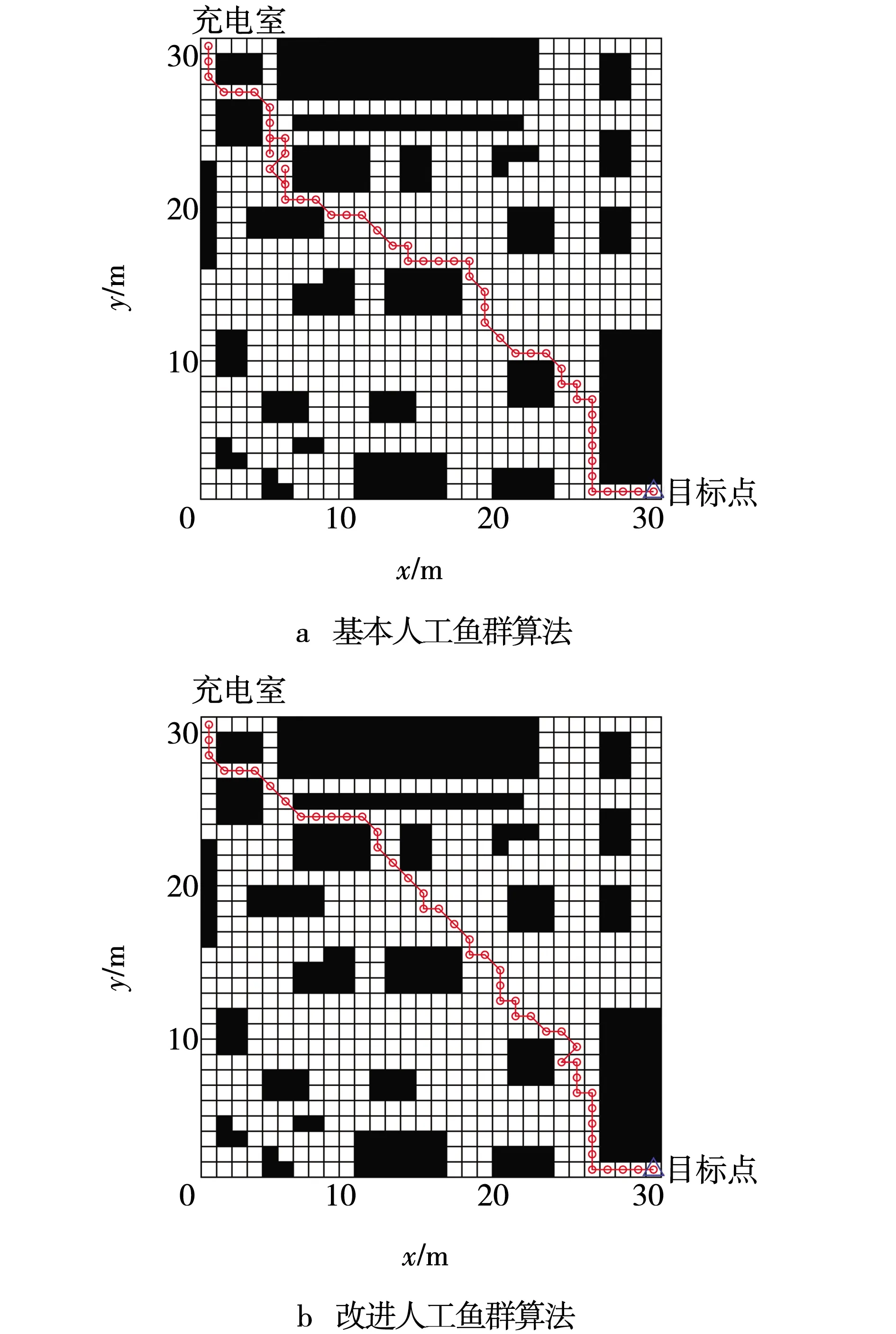
图6 单一设备巡检路径规划Fig. 6 Inspection path planning of single equipment

表2 单设备巡检路径长度和算法运行时间对比
由图6可见,基本人工鱼群算法因为视野和拥挤度因子为固定值,导致全局寻优过程中寻优精度不高,使路线多次出现折返,改进人工鱼群算法很好地避免了该问题。由表2可知,改进人工鱼群算法相较于基本人工鱼群算法,路径长度缩短了10.4%,运行时间减少了8%。
3.2.2 多设备任务巡检
多设备巡检[20]是指当某些设备长期处在一种不间断运行状态时出现的温度升高,或是遇到极端天气,需要对其进行巡查检测。同样人工鱼群算法的基础参数不作变动,更改要巡检点的坐标位置,文中多设备巡检点分别设置为(27,5)、(16,17)、(10,23)、(2,26)、(1,30),仿真结果如图7所示。多设备巡检路径长度和算法运行时间对比如表3所示。通过对比可以看出,由于基本人工鱼群算法中拥挤度因子的取值固定,使在搜索最优解的过程中寻优精度降低,从而导致路径中转折点偏多,增加了路径长度和搜索时间,而改进人工鱼群算法很好改善了该问题。

图7 多设备巡检路径规划Fig. 7 Inspection path planning of multi-equipment
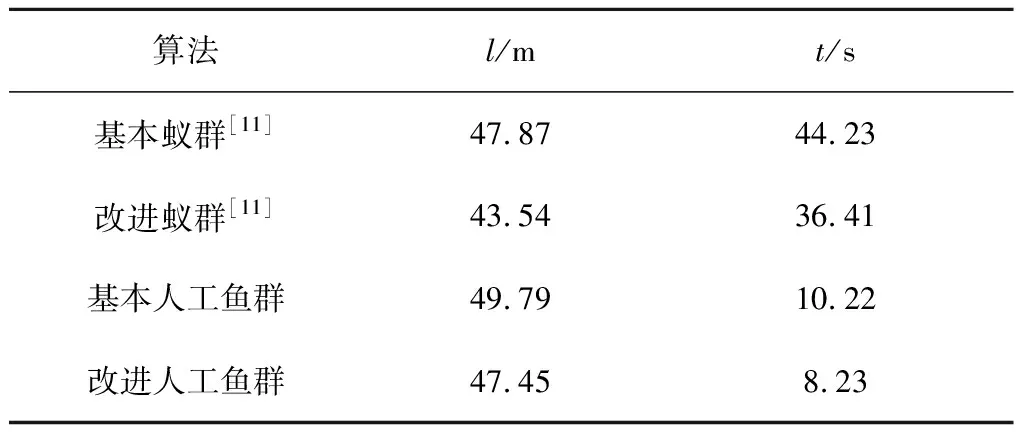
表3 多设备巡检路径长度和算法运行时间对比
由表3可知,改进人工鱼群算法相较于基本人工鱼群算法,在多设备巡检时,路径长度缩短了4.7%,运行时间减少了19.4%。通过与基本蚁群算法多设备巡检的对比可以得出,改进人工鱼群算法在路径长度上优势不明显,只优化了0.88%,但是在运行时间上效果显著,减少了81.3%。与改进蚁群算法相比,改进人工鱼群算法在巡检路径长度上效果不如改进蚁群算法,但在运行时间上改进人工鱼群算法效果显著,相比之下减少了77.4%。
4 结 论
(1)为了使巡检机器人更好胜任变电站的巡检工作,提出了改进人工鱼群算法规划巡检的最优路径,解决了基本人工鱼群算法在寻优时存在全局寻优精度低,易陷入局部最优,且在算法后期收敛速度慢等问题。
(2)提出的改进人工鱼群算法,通过常规巡检与特殊巡检的仿真对比,验证了改进人工鱼群算法的巡检路线长度和运行时间均小于基本人工鱼群算法。同时,在多设备巡检中,通过与蚁群算法的对比,也验证了改进人工鱼群算法应用在巡检路径规划时间上的优越性,提高了77.4%。