上海城市轨道交通全自动运行系统列车蠕动驾驶模式接口控制电路优化方案
2021-12-08许琰
许 琰
(上海地铁维护保障有限公司通号分公司, 200235, 上海∥工程师)
在城市轨道交通全自动运行模式下,列车依赖车载控制器、轨旁设备给予的移动授权,与车辆牵引、制动设备协同配合,共同确保列车全自动运行的安全、可靠。由于大部分与行车控制相关的指令经由ATO(列车自动运行)接口,并通过车辆网络传输至各执行单元,一旦车载信号模块、车辆与车载信号的接口设备发生故障(如通信故障、电流环故障),或车辆网络出现故障(如车辆与牵引、制动系统间的通信故障,或牵引、制动系统网络故障),列车不仅无法实现全自动运行,而且不具备自动降级运行至就近车站的能力,此时需要采用应急驾驶模式中的蠕动驾驶模式。
1 全自动运行线路ATO接口故障下应急驾驶的概述
全自动运行线路ATO接口故障时,若无有效的处理手段,会产生以下问题:① 列车长时间停在区间,影响正常运营秩序;② 需要在采取一系列安全措施后,才能授权司机在区间登乘列车,并进行应急处置,处置的效率较低;③ 列车长时间滞留在区间内,容易引起车内乘客恐慌。
因此,为了提高信号车载系统以及信号-车辆ATO接口部分的可用性,降低设备故障对运营的影响,有必要在ATO接口设备故障时提供远程控制手段,使列车进入应急驾驶的蠕动驾驶模式,列车自动运行至就近站台,其安全防护仍应处于GoA 4(无人干预列车运行)。若需实现上述需求,应具备的基本功能如下:① OCC(运营控制中心)有明确的报警提示,供调度选择是否需要采用应急驾驶模式;② 列车有移动授权;③ 具有对列车方向、牵引、制动等的控制功能;④ 具有超速防护功能;⑤ 具有安全接口防护功能;⑥ 尽可能地对标停车;⑦ 到站后信号车载系统自动扣车。
2 ATO接口故障下蠕动驾驶功能的实现方案
信号区域控制系统、车载控制器、列车控制电路、列车控制单元和列车牵引/制动单元是实现上述蠕动驾驶模式的基础。如何设计车载控制器和车辆电路的硬线接口,是实现上述7项功能的关键。在进行功能及接口设计时,应使蠕动驾驶功能满足运营场景需求,同时设计方案需具有一定的经济性和可扩展性。
2.1 列车蠕动驾驶模式的传统方案
以既有全自动运行项目为例,通过车载控制器检测信号设备和车辆设备之间的通信状态,如在既定周期内生命信号计数器不再跳变,则判断发生了通信故障。
在列车发生紧急制动后, OCC授权执行蠕动驾驶模式,车载控制器向列车发出进入蠕动驾驶模式的命令。列车进入蠕动驾驶模式,列车的牵引/制动系统接收到车载控制器的硬线级位信号,信号系统控制列车运行至前方车站后停车,如对标停车则打开车门。车载控制器和列车控制电路之间的接口如图1所示。
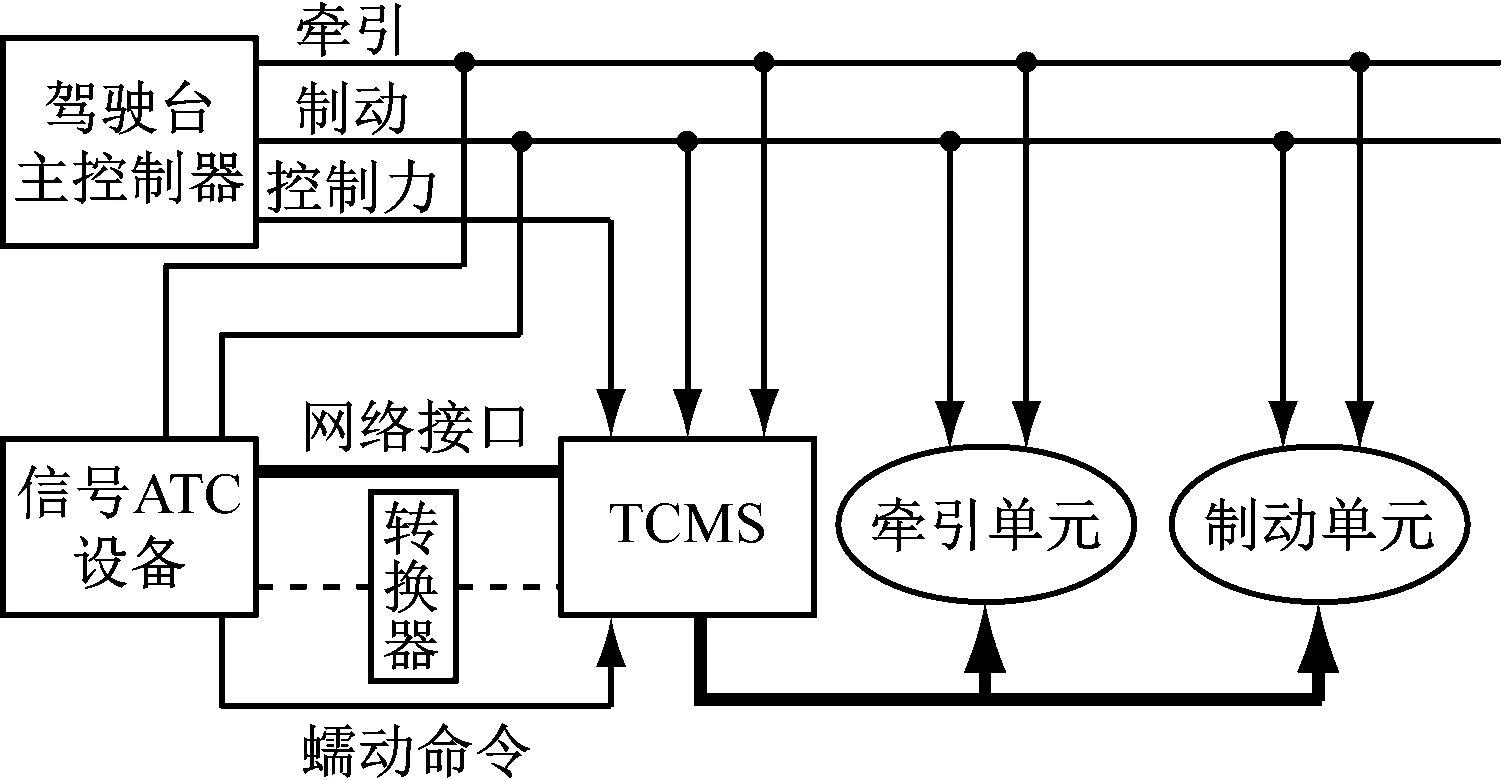
注:ATC——列车运行控制;TCMS——列车控制和管理系统。
各信号接口的定义和功能如下:
1)蠕动驾驶模式是列车全自动运行的降级模式,此模式下列车主要接口防护功能保持不变,如紧急制动,列车车门防护、完整性防护、脱轨、防撞等。
2)牵引、制动命令分别用于蠕动驾驶模式下列车的牵引、制动。
3)蠕动命令用于授权列车进入蠕动驾驶状态,牵引、制动系统不响应车辆网络单元发来的任何关于列车牵引、制动、控制力的命令,而是采用固定级位施加牵引和制动[1]。
2.2 列车蠕动驾驶模式的优化方案
上海轨道交通15号线、18号线在既有方案的基础上,对蠕动驾驶模式下车载控制器和列车控制电路接口作了进一步的优化,如图2所示。与既有方案相比,优化方案在车辆侧增加了“蠕动命令申请”和“目标加速度控制”2项功能。
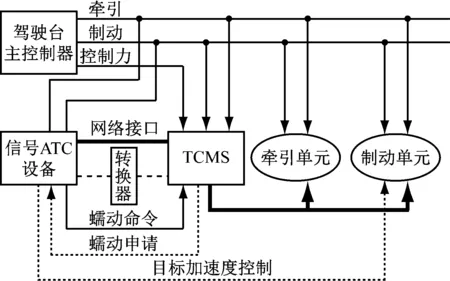
图2 蠕动驾驶模式下车载控制器和列车控制电路接口的优化方案
2.2.1 蠕动命令申请
在全自动运行模式下,若车辆网络内部故障,引起制动系统通信故障(2个网关阀通信故障)或牵引系统通信故障(4个及以上牵引系统通信故障),车辆系统可主动向信号系统申请进入蠕动驾驶模式。车载控制器施加紧急制动停车后向OCC申请进入蠕动驾驶模式,经过OCC确认后,车载控制器向列车发出进入蠕动驾驶模式的命令。
2.2.2 目标加速度控制
在蠕动驾驶模式下,列车依然需要平稳起动、刹车,以及实现车门与站台门的对位,以确保乘客的安全及后续清客处置的效率,因此,车载控制器仍需要通过某种方式对列车的牵引和制动系统进行控制。如表1所示,在既有的硬线模式下,列车牵引/制动控制的目标加速度控制方法通常有单一硬线码位、电流环、PWM(脉冲宽度调制)信号、硬线码位分级控制等,这些控制方法均存在着一定的局限性。

表1 硬线模式下列车目标加速度控制方法的特性比较
1) 单一硬线码位:无法实现列车在站台的精准对位,往往会导致清客时乘客的安全性及清客的效率受到影响。此外,列车在起动/刹车阶段对乘客的乘坐舒适性有所影响。
2) 电流环:信号车载设备输出的模拟量信号(电流/电压)往往无法直接到达执行器,需要借助额外的信号适配模块,用以满足不同信号标准之间的转换,大大增加了接口实现的成本。
3) PWM信号:该接口方式对于输入源的需求差异较大,信号系统车载设备与车辆控制设备往往都需要额外增加PWM编码器和解码器,导致接口成本大幅增加。
4) 硬线码位分级控制:控制级位信号与TCU(牵引控制单元)、BCU(制动控制单元)进行硬线连接,信号系统利用不同级位信号的高/低电平形成不同的真值组合,用以控制列车按级位在区间内平稳行驶、在站台精确对标。目前上海轨道交通15号、18号线采用硬线码位分级控制方案。
3 ATO接口故障下蠕动驾驶功能的安全性和可用性分析
基于上述的方案描述,在ATO接口故障下采用蠕动驾驶模式,列车的安全防护等级仍处于GoA4。此时列车的移动授权由轨旁控制器和车载设备实现,列车的各项接口监控防护(如车门状态、脱轨、防撞等)由车载控制器和列车硬件电路实现,均不影响列车ATP(列车自动防护)的安全性和可用性。
上述蠕动驾驶模式下,因列车硬线接口监控均正常, ATO的相关防护仍处于可用状态,且可在行车调度界面予以显示。列车可通过车辆-综合监控-LTE(长期演进)的综合承载通道,主动推送车辆的系统实时状态信息,调用两路摄像头信息,以实时观察列车,判断列车是否可继续运行或应立即停车。如需要,行车调度还可通过ATS(列车自动监控)界面操作区域封锁或单车远程制动,以便等待工作人员登车处理。
优化后的蠕动驾驶模式可由信号系统、车辆系统分别根据逻辑判断,在确保设备性能、参数满足安全运行的前提下,向OCC行车调度申请进入蠕动驾驶模式,有效提升蠕动驾驶功能的可用性、扩展性。
采用优化后的蠕动驾驶模式时,列车的目标加速度控制所采用的编码控制方式可很好地解决牵引/制动控制精度问题,达到精准停站的目标,为蠕动驾驶状态下提高应急处置效率提供了有力的支撑。本优化方案采用的接口形式在不需要增加不同型号的信号转换设备或不同设计的转换电路情况下解决了信号接口的适配问题,既解决接口通用性的难题,又大大降低了实施的经济成本[2]。
4 结语
蠕动驾驶模式下,本文所述的既有方案和优化方案均能确保列车安全防护等级,安全防护最大程度由信号车载系统接管,以尽可能地提高应急场景下的行车安全。优化方案的应急操作处理过程简单、可用性强,只需OCC在远程进行一步操作即可完成,大大减少了列车迫停区间的时间,提高了故障应急处置效率。与既有方案相比,优化方案的可用性有大幅度的提升,同时为远期应急驾驶模式适用场景的调整预留了扩展空间。为实现本文所述的优化方案,信号、车辆系统均需增加相应的软件设计和列车线电路,成本略有增加。
蠕动驾驶模式是城市轨道交通全自动运行线路列车运行的重要备用模式,深化对ATO接口故障下蠕动驾驶模式的研究并形成应用方案,对于完善全自动运行系统的功能、提升运营管理水平、促进相关技术发展均具有积极意义。
