城市轨道交通全自动运行的列车控制模式自动升级方案研究
2021-12-08黄浩勇
黄浩勇 柴 娟
(1.成都工业职业技术学院, 610031, 成都; 2.上海地铁维护保障有限公司通号分公司, 200235, 上海∥第一作者, 高级工程师)
在城市轨道交通全天运行中会经历各种不同的场景,包括列车唤醒、出库、正线运行、回库及故障等。根据不同应用场景的需求,列车控制模式也需随之进行升级或者降级,以保障列车安全、高效、可靠运行。
在有人驾驶情况下,列车的相关控制模式可以由司机完成,也可以由信号系统自动完成。在有人驾驶的CBTC(基于通信的列车控制)情况下,列车控制模式的降级一般需要在列车停车后由司机人工选择,而控制模式的升级一般可以由信号系统自动完成,包括由人工限制驾驶模式升级到人工ATP (列车自动防护)模式、ATO(列车自动运行)模式。
在FAM(全自动运行模式)下,由于列车上没有司机,信号系统需要根据一定的技术手段来自动完成列车控制模式的升级,这也是FAM高度自动化的体现之一。需要自动升级的场景主要包括列车唤醒后的自动升级、车载信号系统故障重新启动(以下简称“重启”)后的自动升级等。当然这其中还需要具备相关的技术前提条件,如唤醒后的自动升级需要列车具备记忆定位功能或通过信标读取完成初始定位。
本文从场景的角度出发,研究FAM下需要完成列车控制模式自动升级的具体场景,并研究列车控制模式自动升级的技术方案。
1 FAM下列车控制模式自动升级场景
1.1 列车唤醒后的自动升级
对于全自动运行下的列车控制模式,列车从未激活状态到激活状态,再到列车出库进入正线的整个流程,都是依靠信号系统、车辆系统、通信系统和综合监控系统协同、自动实现的。
列车唤醒的过程如下:
1) OCC(运营控制中心)行车调度应在列车自动唤醒前通过ATS(列车自动监控)确认在停车库内或正线休眠点的列车工况均为休眠。
2) ATS根据出库计划自动下发列车唤醒指令。信号系统的唤醒模块通过采集车辆低压母线上电信号,以判断列车是否被激活。
3) 列车上电后,CC(车载控制器)、车辆设备、车载通信设备开始自检。车辆设备、车载通信设备上电并自检成功后,将自检结果送给TCMS(列车控制和管理系统)。TCMS将自检结果汇总后,通过自检成功码位反馈给CC。CC自检成功后,汇总TCMS发来的车辆设备、车载通信设备的自检结果,上报OCC列车上电、完成自检。
4) 列车完成上电自检后进入联合自检。
5) 联合自检成功后,列车自动进入FAM,同时CC将联合自检的完整信息上报ATS。其中,列车是否进入FAM的信息也包括在内。
6) ATS自动唤醒联合自检成功的列车,下发运营计划。
7) ATS自动向列车下发“待命”命令。
1.2 列车降级后的自动升级
列车发生故障后,出于安全考虑,需要将列车控制模式降级,以限制列车的运行速度。在FAM下,车辆系统、信号系统发生故障,都会引发列车控制模式降级。以车载信号系统故障为例,列车发生车载故障后需进行设备重启,重启经处置后恢复的情况下在一定的条件下具备自动进入FAM的条件。因硬件设备故障引起、重启后无法消除的故障,本文暂不研究。以下是针对由于软件故障造成车载设备重启的处置场景:
1) 车载ATC(列车自动控制)设备发生单系故障时,自动进行主备切换;
2) 车载ATC设备两系均故障时,列车紧急停车;
3) 列车紧急制动无法恢复时,需通过OCC远程重启,恢复ATC车载控制器的功能。重启成功后,OCC授权列车进入远程RM(限制人工模式)。当条件满足时,列车再自动升级为FAM。
由此,根据列车车载故障场景,车载需要具备远程重启、远程控制行车及自动升级为FAM等功能。
2 FAM下列车控制模式自动升级的方案研究
2.1 列车唤醒后自动升级为FAM
列车唤醒后自动升级为FAM的具体流程见图1所示。
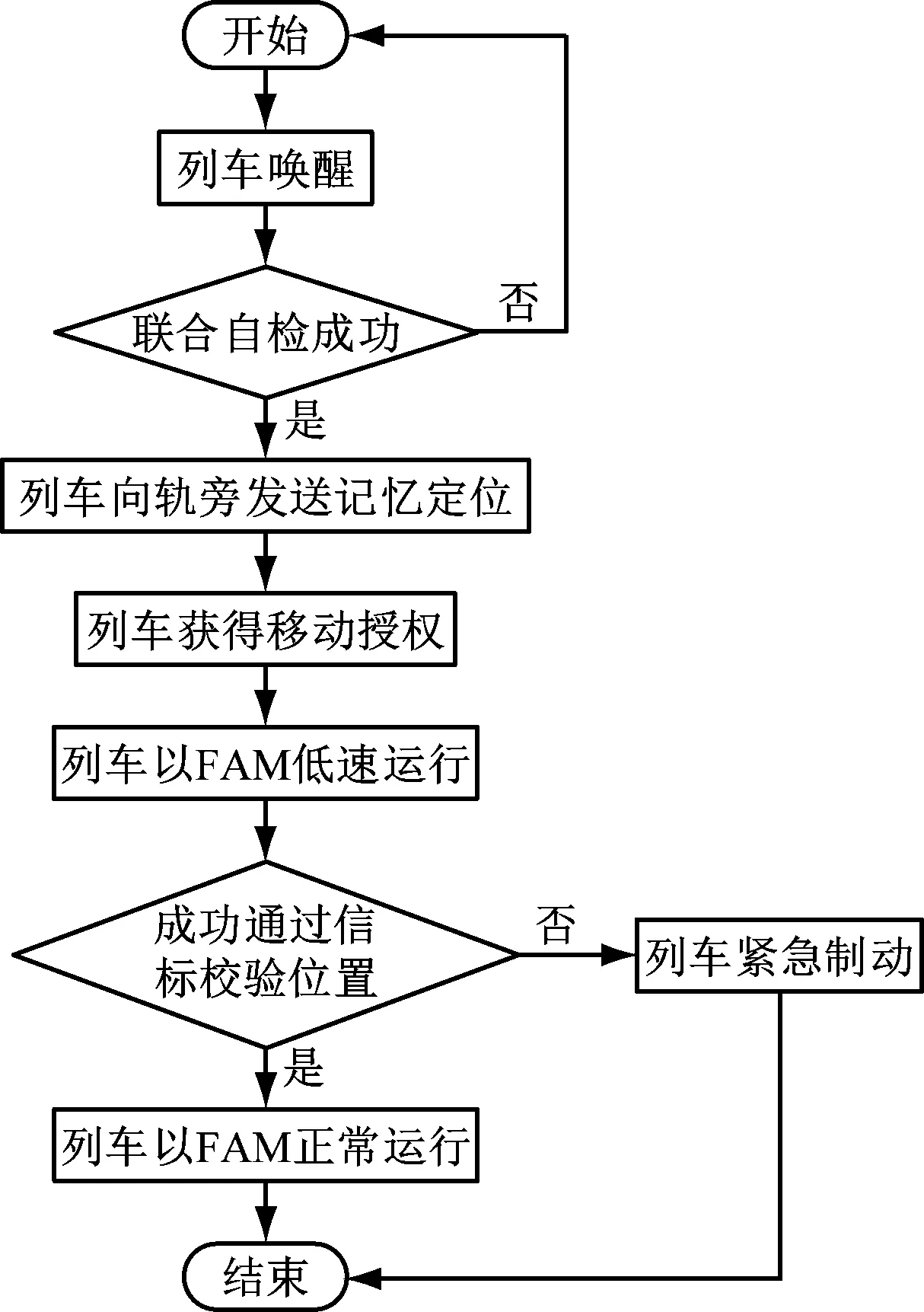
图1 列车唤醒后自动升级为FAM的启动流程
基于列车自动唤醒出库的场景,全自动运行列车在停车库完成联合自检后自动升级到FAM需具备一定条件。其中,首要的条件是必须具备列车定位信息,而此时车载信号系统刚刚完成初始化,如果要在未动车前具备精确的定位信息,车载信号系统必须具备记忆列车休眠前位置的功能。车载信号系统可以在列车休眠前先将位置信息存储于ROM (只读存储器)单元中,一旦车载设备休眠断电,ROM中的列车位置信息将被保存下来。
这样的列车位置保持方式带来了另外的问题,即一旦列车休眠,该列车将不能在车载设备未开启的情况下移动,如果发生了移动,那么列车的实际位置信息将与ROM中存储的信息不符,进而可能引发安全问题。由此,为了防止列车位置移动后带来的安全问题,车载需要在列车运行时进行位置校验,以确定ROM中保存的位置信息的正确性。一旦列车位置校验失败,信号车载系统将输出紧急制动命令。根据以上需求,需要将特定的校验信标安装于指定的列车休眠唤醒区域。图2为列车休眠区校验信标布置原则示意图。

图2 列车休眠区校验信标的布置示意图
以上方案的不足在于列车一旦在断电过程中发生位置改变,需要在唤醒后通过一定的技术手段进行位置校验。基于这个原因,本文提出改进方案如下:将位置处理单元独立布置,或在车载其他设备休眠的状态下使位置处理单元仍处于工作状态,这样可以无需再定义具体的休眠区,还能避免列车在休眠过程中发生非期望移动产生记忆位置与实际位置不符的问题,也不再需要在特殊位置设校验信标,进而节省了运维成本。在列车唤醒后,车载设备可直接获得当前的位置信息,以完成升级为FAM。
2.2 车载设备故障恢复后自动升级为FAM
2.2.1 车载ATC设备单系故障
对于车载ATC设备单系故障,信号车载系统应能自动切换至备用系统并运行,但不能仅依靠单系统长时间维持运营,这就要求车载ATC必须具备重启故障一系的能力。单系故障后的重启复位不能影响列车的正常运行,可以通过2种方案来实现:
1) 车载ATC自动判断。ATC自动检测到车载设备一系故障后,通过另一系发送重启指令,完成故障设备的重启。
2) OCC远程控制。OCC收到车载故障告警信息后,通过远程操作实现车载设备远程重启。
2.2.2 车载ATC设备两系均故障或列车紧急制动无法恢复
车载ATC两系均故障时,列车产生紧急制动,此时只能通过OCC发送远程重启指令来实现车载设备复位。这样的处置方式同样适用于紧急制动无法恢复的场景。此时车载设备重启装置应独立于车载信号系统,否则将无法实现重启指令的接收功能。
2.2.3 远程辅助驾驶模式控制
列车运行过程中发生故障后采取重启措施,信号车载系统初始化后是没有定位信息的,因此,如果列车要自动升级为FAM,必须使列车被准确定位。一种可行的方式是通过远程辅助驾驶列车的方式,读取轨旁定位信标,实现列车定位的建立。
远程辅助驾驶首先要应考虑列车的运行安全。在远程辅助驾驶模式启用前,列车无精确定位,但是有区段占用信息,其防护区域需覆盖整个计轴区段。图3为无精确定位列车的移动授权过程示意图,具体的授权过程为:①信号系统判断列车运行前方进路状态,只有有效的进路才能授权;②轨旁区域控制器根据列车运行前方的运行条件判断列车的移动授权,并发送给列车;③收到移动授权命令后,列车以FAM低速运行;④列车读取轨旁信标后便完成自身精确定位,此时列车可自动升级为FAM。

注:AP——自动防护;G1——列车占用计轴区段;S1、S2——信号机。
3 结语
对于全自动运行线路,列车控制模式的自动升级是非常重要的功能,这决定了列车在降级情况下的处置效率。若列车无法完成自动升级,转为人工处置将需要较长的时间,甚至可能会造成长时间的运营中断。与有人驾驶模式相比,全自动运行涉及的运营场景更多、更为复杂,需要通过对场景进行更为深入的分析,以完善其功能方案设计。本文可为未来全自动运行线路的场景设计和方案设计提供参考。
