基于幕墙检测与清洗机器人的缺陷识别算法优化
2021-12-07张培包钊华杨荣建
张培 包钊华 杨荣建

摘 要: 针对玻璃幕墙出现缺陷难以发现并处理的问题,本文设计了集缺陷识别与清洗一体的机器人,通过图像识别获取缺陷种类并完成清洗。针对已有算法分类准确性不足的问题,引入L1-L2范数及判别准则用以提升算法的分类效果,并在所设计的机器人平台上完成实验,最终实验表明优化后的算法在识别划痕方面平均提升为2%,总体识别准确率提升1%。优化后机器人能完成幕墙的日常维护及危险报警工作。
关键词: 玻璃幕墙; 机器人; 缺陷识别; 图像分类
文章编号: 2095-2163(2021)07-0134-04中图分类号:TP391.41文献标志码: A
Optimization of defect recognition
algorithm based on curtain wall inspection and cleaning robot
ZHANG Pei, BAO Zhaohua, YANG Rongjian
(School of Mechanical and Automotive Engineering, Shanghai University of Engineering Science, Shanghai 201620, China)
【Abstract】Aiming at the problem that it is difficult to find and remove the defects of glass curtain wall, a robot integrating defect recognition and cleaning is designed in this paper. Through image recognition, the types of defects can be obtained, and the cleaning or recording and alarm can be completed. Aiming at the problem that the classification accuracy of the existing algorithms is insufficient, L1-L2 norm and discriminant criteria are introduced to improve the classification effect of the algorithm and the experiment is completed on the designed robot platform. The results show that the optimized algorithm can improve the recognition of scratches and cracks by up to 2%, and the overall recognition accuracy increases by 1%. After optimization, the robot can complete the daily maintenance and danger alarm of the curtain wall.
【Key words】glass curtain wall; robot; defect recognition; image classification
0 引 言
随着城市的不断建设,采光性能、防潮性能优异、有良好视觉体验的玻璃幕墙被广泛应用于各类建筑,特别是高层建筑,大多都采用玻璃幕墙[1-3]。但幕墙的维护具有较高的难度,首先为了维护其外观需要定期进行清洗,而当前幕墙仅能通过人工进行清洗,尚未出现能实际应用的清洗设备[4-5]。其次,玻璃相较于其他建筑材料更脆,发生玻璃破损对周围人员将会造成起极大的伤害,而对已投入使用的玻璃幕墙进行缺陷的检测同样难度大且效率低[6]。既有的算法如SVM、小波算法等在缺陷分类效果方面都存在准确度不足的问题[7-8]。故本研究建立集幕墙缺陷识别与清洗一体的机器人,改进了图像识别算法,通过改进的神经网络算法实现对缺陷的识别。
1 检测机器人设计
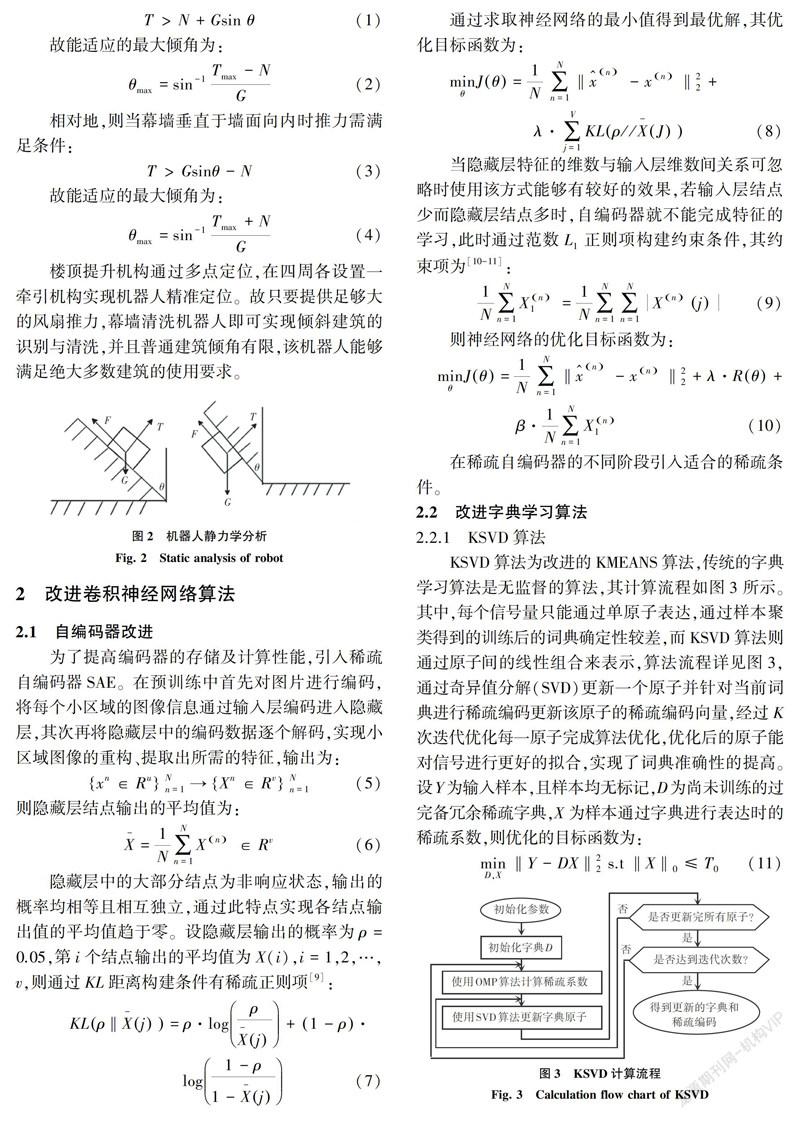
機器人本体如图1所示,清洗刷位于平台中部,用于污渍清洗;检测设备位于平台下部,进行幕墙缺陷检测;四周为涵道风扇,提供清洗压力,此外有辅助提升机构,通过提升机构控制机器人位置。为了适用不同外观的幕墙,依据机器人姿态对其力学条件进行分析如图2所示。设风扇推力为T,机器人总重为G;清洗压力为N,倾角为θ,且存在一外部拉力F使机器人实现高度方向稳定,则当幕墙垂直于墙面向内时推力需满足条件:
故能适应的最大倾角为:
相对地,则当幕墙垂直于墙面向内时推力需满足条件:
故能适应的最大倾角为:
楼顶提升机构通过多点定位,在四周各设置一牵引机构实现机器人精准定位。故只要提供足够大的风扇推力,幕墙清洗机器人即可实现倾斜建筑的识别与清洗,并且普通建筑倾角有限,该机器人能够满足绝大多数建筑的使用要求。
2 改进卷积神经网络算法
2.1 自编码器改进
为了提高编码器的存储及计算性能,引入稀疏自编码器SAE。在预训练中首先对图片进行编码,将每个小区域的图像信息通过输入层编码进入隐藏层,其次再将隐藏层中的编码数据逐个解码,实现小区域图像的重构、提取出所需的特征,输出为:
则隐藏层结点输出的平均值为:
隐藏层中的大部分结点为非响应状态,输出的概率均相等且相互独立,通过此特点实现各结点输出值的平均值趋于零。设隐藏层输出的概率为ρ=0.05,第i个结点输出的平均值为X(i),i=1,2,…,v,则通过KL距离构建条件有稀疏正则项[9]:
通过求取神经网络的最小值得到最优解,其优化目标函数为:
当隐藏层特征的维数与输入层维数间关系可忽略时使用该方式能够有较好的效果,若输入层结点少而隐藏层结点多时,自编码器就不能完成特征的学习,此时通过范数L1正则项构建约束条件,其约束项为[10-11]:
则神经网络的优化目标函数为:
在稀疏自编码器的不同阶段引入适合的稀疏条件。
2.2 改进字典学习算法
2.2.1 KSVD算法
KSVD算法为改进的KMEANS算法,传统的字典学习算法是无监督的算法,其计算流程如图3所示。其中,每个信号量只能通过单原子表达,通过样本聚类得到的训练后的词典确定性较差,而KSVD算法则通过原子间的线性组合来表示,算法流程详见图3,通过奇异值分解(SVD)更新一个原子并针对当前词典进行稀疏编码更新该原子的稀疏编码向量,经过K次迭代优化每一原子完成算法优化,优化后的原子能对信号进行更好的拟合,实现了词典准确性的提高。设Y为输入样本,且样本均无标记,D为尚未训练的过完备冗余稀疏字典,X为样本通过字典进行表达时的稀疏系数,则优化的目标函数为:
式(11)的计算通常借助正交匹配跟踪算法求解,从大到小依次找到对目标函数产生贡献的原子,最后贡献最小的原子即为所求目标。
在迭代更新的过程中,由于数据均通过原子线性表示,不可避免地存在一定误差,为了减小数据的误差,将目标依据不同列进行依次更新迭代,其优化函数为:
通过引入Ek降低Dk的拟合误差,T为所设阈值,表示X中非零元素最大存在个数,保证过程的稀疏性。
2.2.2 改进KSVD算法
KSVD算法虽然在控制误差和稀疏性上效果相对较好,却并未在特征分类上实现优化,针对幕墙的缺陷,不仅需要发现目标,更需要对其进行分类,以便针对不同缺陷进行下一步规划。
为了保证在编码过程中保留尽可能多的信息,引入L1-L2范数[12]:
L1-L2范数能够在群集层面进行稀疏,该范数解决了仅通过L1范数只能对基数层进行稀疏,无法获得足够编码信息的缺陷。故优化函数为:
式(14)中,γ用以保证误差与稀疏度间的平衡关系。
在此基础上,通过增加判别准则将特征进行分类,得到关于稀疏表示字典与判别能力字典的模型,判别模型为:
最终通过输入信号X与判别能力字典W的乘积进行类型判定。
3 模型训练
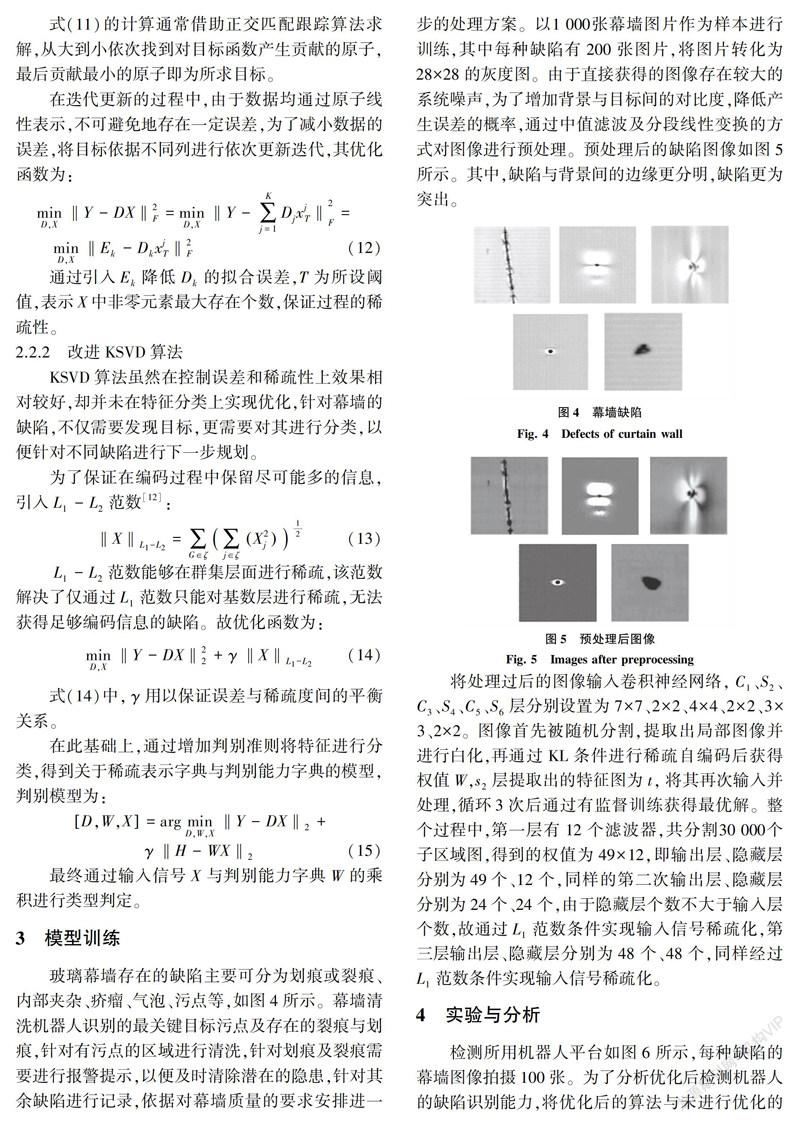
玻璃幕墙存在的缺陷主要可分为划痕或裂痕、内部夹杂、疥瘤、气泡、污点等,如图4所示。幕墙清洗机器人识别的最关键目标污点及存在的裂痕与划痕,针对有污点的区域进行清洗,针对划痕及裂痕需要进行报警提示,以便及时清除潜在的隐患,针对其余缺陷进行记录,依据对幕墙质量的要求安排进一步的处理方案。以1 000张幕墙图片作为样本进行训练,其中每种缺陷有200张图片,将图片转化为28×28的灰度图。由于直接获得的图像存在较大的系统噪声,为了增加背景与目标间的对比度,降低产生误差的概率,通过中值滤波及分段线性变换的方式对图像进行预处理。预处理后的缺陷图像如图5所示。其中,缺陷与背景间的边缘更分明,缺陷更为突出。
将处理过后的图像输入卷积神经网络,C1、S2、C3、S4、C5、S6层分别设置为7×7、2×2、4×4、2×2、3×3、2×2。图像首先被随机分割,提取出局部图像并进行白化,再通过KL条件进行稀疏自编码后获得权值W,s2层提取出的特征图为t,将其再次输入并处理,循环3次后通过有监督训练获得最优解。整个过程中,第一层有12个滤波器,共分割30 000个子区域图,得到的权值为49×12,即输出层、隐藏层分别为49个、12个,同样的第二次输出层、隐藏层分别为24个、24个,由于隐藏层个数不大于输入层个数,故通过L1范数条件实现输入信号稀疏化,第三层输出层、隐藏层分别为48个、48个,同样经过L1范数条件实现输入信号稀疏化。
4 实验与分析
检测所用机器人平台如图6所示,每种缺陷的幕墙图像拍摄100张。为了分析优化后检测机器人的缺陷识别能力,将优化后的算法与未进行优化的其余算法进行比较,通过对同一批的不同缺陷幕墙的检测,实验结果如圖7所示,图7中纵轴为对各项缺陷正确识别的个数。由图7可知,改进后的算法有着明显优势,每一类缺陷都优于改进前的算法,其中对划痕的识别效果最好、对气泡及污点的识别效果次之。相较于算法逻辑最接近的KSVD算法,在5类缺陷中对划痕的识别效果的提升最大,准确率提升了2%,对于各类缺陷的平均准确率提高了1%,算法优化后的识别效果更好。
5 结束语
针对玻璃幕墙外表缺陷问题,本文设计了集缺陷识别与清洗一体的机器人,在现有的KSVD图像识别算法的基础上进行优化,引入L1-L2范数及判别准则用以提升算法的分类效果,并将此算法应用于玻璃幕墙缺陷的检测,通过所设计的机器人平台进行实验验证,结果表明,优化后的算法在识别划痕及裂纹方面提升最大为2%,总体识别准确率提升了1%,所设计的机器人能够完成对玻璃幕墙的维护工作。
参考文献
[1]张子博,刘荣,杨慧轩. 用于玻璃幕墙清洗的爬壁机器人的研制[J]. 自动化与仪表,2016,31(5):6-9,28.
[2]惠存,郑胜林,王元清,等. 双层热通道玻璃幕墙研究进展及展望[J]. 环境工程,2015,33(S1):806-811.
[3]冯若强,王鑫,叶继红. 索网玻璃幕墙结构抗震性能研究[J]. 振动工程学报,2013,26(4):477-486.
[4]陈贵亮,曹伟涛,杨冬,等. 基于阻抗控制的幕墙安装机器人柔顺操作研究[J]. 工程设计学报,2017,24(1):100-107.
[5]张永德,姜金刚,张舒,等. 柔索驱动的玻璃幕墙清洗机器人研制及实验研究[J]. 仪器仪表学报,2013,34(3):494-501.
[6]李芊,杜少英. 既有玻璃幕墙安全风险预警机制研究[J]. 施工技术,2016,45(3):96-100.
[7]余竹,夏禾,殷永高,等. 基于小波变换与Lipschitz指数的桥梁损伤识别研究[J]. 振动与冲击,2015,34(14):65-69,84.
[8]张迪飞,张金锁,姚克明,等. 基于SVM分类的红外舰船目标识别[J]. 红外与激光工程,2016,45(1):179-184.
[9]王冠皓,徐军. 基于多级金字塔卷积神经网络的快速特征表示方法[J]. 计算机应用研究,2015,32(8):2492-2495.
[10]翟雪含,朱卫平,康彬. 结合KSVD和分类稀疏表示的图像压缩感知[J]. 计算机工程与应用,2015,51(6):193-198.
[11]乐友喜,杨涛,曾贤德. CEEMD与KSVD字典训练相结合的去噪方法[J]. 石油地球物理勘探,2019,54(4):729-736,721.
[12]任真,李四海. 基于L1-L2联合范数约束的中药近红外光谱波长选择[J]. 计算机应用与软件,2018,35(12):99-103.
作者简介: 张 培(1994- ),男,硕士研究生,主要研究方向:机器人机构设计。
通讯作者: 张 培Email:1845923040@qq.com
收稿日期: 2020-12-25
