基于AI图像识别技术的架空乘人装置智能控制系统设计及应用
2021-12-04杨坤张永福
杨坤 张永福

摘要:目前国内煤矿井下架空乘人装置大多数实现了自动或者半自动控制,但大部分没有实现智能控制,鉴于此,设计了一套基于AI图像识别技术的架空乘人装置智能控制系统,详细介绍了系统组成、系统设计和功能,利用AI图像识别技术对上下乘车点、乘车沿途进行图像智能识别分析,并与控制系统联动,有效防范了运送人员过程中的不安全因素,实现了架空乘人装置安全运行、无人值守运行。实践证明,该系统运行稳定,实现了架空乘人装置的智能运行。
关键词:架空乘人装置;AI图像识别技术;智能控制;无人值守
0 引言
近年来,我国从政府层面先后出台了一系列政策和规划,大力推进煤矿智能化建设[1],实现井下作业人员的少人化和无人化,提升煤矿本质安全水平,而其中人工智能是智能煤矿建设的关键技术,在实现架空乘人系统无人值守中发挥着重要作用。架空乘人装置是煤矿井下常用的辅助运输设备之一,主要用于运输井下人员,节省人员非必要的体力消耗。目前国内煤矿井下大多数架空乘人装置已实现自动或者半自动控制,即可以做到定时开停架空乘人装置或安排井下值班人员开停架空乘人装置,但无法做到工人到上车点自动启动架空乘人装置,下车后自动停止架空乘人装置;同时,在人员安全保障[2]方面仅仅局限于越位保护、急停保护、断绳保护、语音报警等,无法对乘车过程中的人员行为进行实时监控。为了实现架空乘人装置的智能运行,本文提出了基于AI图像识别技术的架空乘人装置智能控制系统设计。
1 系统组成
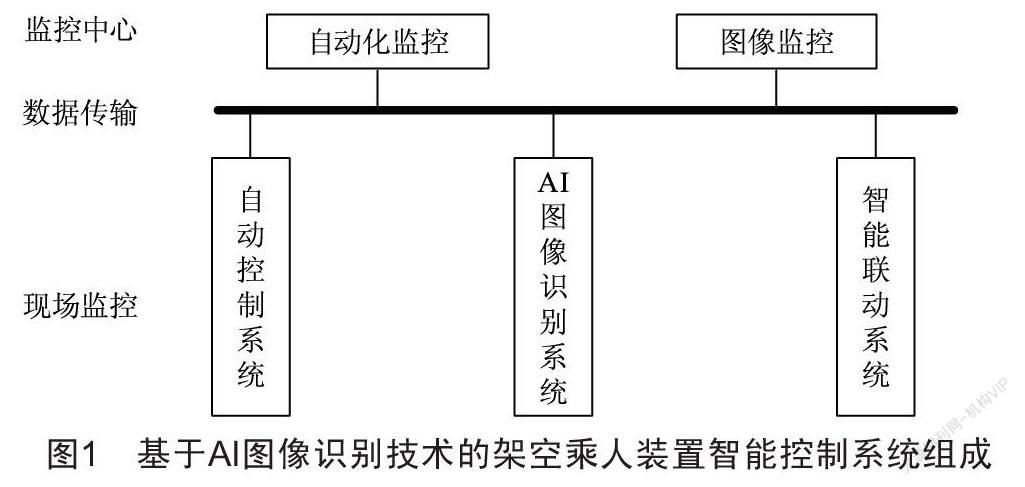
如图1所示,基于AI图像识别技术的架空乘人装置智能控制系统主要由监控中心、数据传输、现场监控等组成。
1.1 监控中心
部署在地面集控中心,包括工控机、显示器、报警装置等硬件设备及配套软件,显示部分分为自动化监控和图像监控两部分。自动化监控部分可以实时监视架空乘人装置系统数据,实时显示紧急停机区域、过乘急停保护区域、钢丝绳托槽保护、沿线急停闭锁等及故障位置、电机电流、温度等数据;可控制架空乘人装置的启停和故障紧急停车;同时,具备操作记录和故障记录查询功能、数据曲线分析等功能。图像监控部分可以实时显示监控图像,可以显示图像智能分析及报警画面,具备报警图片和报警短视频截取、存储功能。
1.2 数据传输
可以利用矿井工业以太网[2]、F5G网络或5G/Wi-Fi 6等信息网络进行数据传输。
1.3 现场监控
现场监控包括:(1)自动控制系统;(2)AI图像识别控制系统;(3)智能联动系统。
自动控制系统:实现架空乘人装置的设备参数采集、保护接入和设备控制;具备闭锁逻辑控制,可根据接收到的信号自动启停,采用主控器PLC作为控制单元[3]。
AI图像识别控制系統和智能联动系统:主要实现各类场景的图像识别,并与控制系统进行联动,实现架空乘人装置的安全高效运行。
2 AI识别算法介绍
在架空乘人装置的上车点、下车点以及沿线安装AI智能摄像仪,根据摄像仪捕捉的画面,利用视频处理的方法基于设定场景对画面进行智能识别分析。
如图2所示,AI图像智能识别主要流程如下:(1)提取摄像仪输出的视频帧;(2)根据提取的视频帧,划定检测识别区域;(3)预处理检测区域的图像;(4)边缘提取处理后的图像特征,与样本库特征进行比对,并输出检测识别结果。
预处理:主要分为图像灰度化和滤波。检测区域的图像为三通道RGB彩色图像,首先要对其进行灰度化,将其从彩色图转换成灰度图;其次要对灰度图进行滤波处理,用来去除图像中的噪点、黑斑和无关因子。
AI智能识别算法:采用结构化图像分析处理技术,涉及图像采集、目标检测、目标跟踪、属性分类、目标轨迹分析、图像叠加、编码、RTSP推流等。核心目标识别算法采用人工智能领域中卷积神经网络与全连接层构建技术,通过采用一体化卷积网络检测算法,把整张图像作为数据输入,通过一次前向传播得到目标的定位位置和目标类别,然后再采用RPN的多参考窗口技术,进一步在多个分辨率不同特征图上进行识别检测。采用高级的跟踪算法,通过预训练的神经网络模型提取目标物理特性,通过该模型计算每个目标的外观特征值,然后计算前后两帧中目标计算特征值之间的“余弦距离”来比较两个目标的相似度,实现有效识别和分析。
3 AI图像识别控制系统设计和功能
AI图像识别控制系统,通过实时读取场景行为视频数据,基于深度学习、视频大数据分析和计算机视觉目标跟踪等技术,有效识别人员进入区域或闯入危险区域、未佩戴安全帽、乘距等。首先需要完成样本视频中行为事件的标注;其次完成基于行为事件标注数据的模型训练;然后对训练完成的模型进行测试和优化;最后完成行为事件识别的接口开发,返回视频中行为事件识别的检测结果。
AI图像识别控制系统的架构包括图像智能分析、系统联动和效果展示。图像智能分析主要由图像采集单元、智能分析检测单元、就地报警单元等组成;系统联动由网络传输、信号传递和设备控制单元组成;效果展示是AI图像识别控制系统识别效果的最终呈现,同时负责业务数据存储转发、报警信息推送、报警录像存储及回放。
3.1 定义报警和控制规则
根据系统应用需求,视频分析检测人员、乘距、人员行为等情况,以实现对人员安全的保护。根据视频分析结果定义如下规则。
报警规则:根据预设的场景识别功能,识别结果包括是或否;识别后智能摄像仪就地语音报警,地面软件进行存储记录。
控制及联动规则:智能摄像仪通过以太网通信输出数据到自动控制系统或通过摄像仪的干接点直接控制架空乘人装置停车。
智能摄像仪内置AI智能处理芯片,采用AI智能算法图像语义分割技术,对移动的物体进行边缘提取,找出各类物体的区域,从而进行智能识别;具备报警开关量输出功能,具备RS485串口通信功能,支持标准的Modbus协议。通过此协议智能摄像仪可以与主控器PLC相互通信,从而实现数据对接、系统联动。
3.2 主要应用场景及功能
3.2.1 人员识别
基于深度学习的检测算法,对上车点、下车点、变坡点以及沿线关键区域进行人员识别检测,识别后可与控制系统联动。即人员到上车点后,能自动识别,实现自动启动架空乘人装置;到下车点后,如果人员未下车则自动停车;在变坡点及沿线关键区域,进行实时监控,结合计算机视觉目标检测算法,当指定区域有人体出现时,进行报警。
3.2.2 乘距识别与联动
主要对上车阶段的乘车距离进行识别,一旦识别到乘车距离过近时,AI摄像仪自动报警。乘距可设置报警距离和停车距离,根据设置距离判断是否自动停车。
3.2.3 人员行为识别与联动
主要对人员是否佩戴安全帽、是否携带超长/超高物品,使用人工智能方法,对监测区域进行全天候监视,对未佩戴安全帽或携带超限物品等行为及时发现并上报,做到及时发现、主动报警、必要时停车。
3.2.4 人数统计
对上车点区域进行监测,当监测区域内人员超出设定人员数量时,可自动报警,就地提醒拥挤人员,阈值可灵活设置。
4 结语
随着矿井“新基建”[4]的不断推进,人工智能技术必将在智能化煤矿建设中发挥重大作用。基于AI图像识别技术的架空乘人装置智能控制系统,其核心技术是人工智能图像识别,核心目的是保障人身安全,实现手段是系统联动,最终目标是实现系统的无人值守、智能化運行。该系统已在平煤股份十一矿得到应用,实践表明系统运行稳定可靠,值得推广应用。
[参考文献]
[1] 孙继平.煤矿物联网特点与关键技术研究[J].煤炭学报,2011,36(1):167-171.
[2] 黄涛,肖仁喜.矿用架空乘人保护装置及安全设施[J].煤矿机电,2020,41(2):92-95.
[3] 张汉焘.基于物联网的架空乘人装置无人值守系统的应用[J].机械管理开发,2019,34(8):214-215.
[4] 刘峰,王世雅.清楚认识我国煤矿智能化发展进程[N].中国煤炭报,2020-11-21(004).
收稿日期:2021-08-20
作者简介:杨坤(1984—),男,河南平顶山人,工程师,主要从事煤矿智能化、信息化相关工作。
