基于多轨延迟-多普勒图的海面目标定位模糊去除
2021-12-02张智君严颂华马娅婕
张智君,严颂华,马娅婕,田 茂
(1.武汉科技大学信息科学与工程学院,武汉 430081;2.武汉晴川学院北斗学院,武汉 430204;3.武汉大学遥感信息工程学院,武汉 430079)
在全球导航卫星系统反射(global navigation satellite system-reflections,GNSS-R)技术的研究中,延迟多普勒图(delay-Doppler map,DDM)在环境监测方面的应用越来越广泛。中外就星载DDM在土壤湿度[1-2]、海风反演[3-5]等方面已有广泛研究。
近几年利用星载DDM在静态目标探测方面也有了初步尝试。武汉大学团队对北斗卫星信号成像原理进行了研究,并利用TDS-1卫星数据重构海面散射区域进行海冰探测[6-8]。Simone等[9]利用欧空局和萨利卫星公司获取的TDS-1(TechDemoSat-1)数据验证了DDM对海冰探测理论和实验的可行性。Cheong等[10]、Southwell等[11]采用TDS-1数据,使用滤波器方法在对海上石油钻井平台和海冰检测中海杂波的去除后进行了目标探测。Yan等[12-13]则利用神经网络针对TDS-1卫星的DDM数据,以海冰为目标进行检测研究。
但是从中外研究情况来看,利用DDM探测静态目标存在一个问题,即目标定位模糊问题。其主要原因在于DDM中具有相同多普勒和码延迟的同一点对应地球表面2个地理位置,这样造成了目标的定位模糊或者说出现了假目标。虽然前人已经尝试了一些方法,例如欧空局的Park等[14]提出采用天线阵列构成窄波束,然后采用空间滤波方法,使每个单波束只照射目标区域的一半来解决GNSS-R成像中的模糊问题;Li等[15]采用双天线法约束条件,模拟了通过调整星上天线的侧摆指向不同照射角度照射,产生不同天线约束条件来解决散射系数映射到空间域的模糊问题。然而,由于天线阵列系统的改造和侧摆会增加星上接收系统的复杂性,且受到功率、尺寸和质量的限制,目前的GNSS-R卫星都只提供单波束情况下的DDM数据,因此这些方法不适用于现有的卫星平台。
现从理论上推导星载DDM数据的海面目标定位模糊产生的原因,针对该问题首次提出一种利用多颗卫星轨迹上的DDM数据联合去除海面静态目标定位模糊的方法,并通过实测数据验证该方法的可行性。
1 DDM中静态目标定位模糊的原因
1.1 DDM中静态目标的特性
美国航空局于2016年发射了Cyclone全球导航卫星系统(Cyclone global navigation satellite system,CYGNSS)卫星星座,并发布了CYGNSS工作手册,根据文献[16]得知,导航信号由GNSS卫星发射,从海面上反射,被CYGNSS卫星星座中的某一颗接收,其导航反射信号模型如图1(a)所示。具有不同码延迟及多普勒的回波信号经过星载接收机处理后输出DDM。当海面无目标时,DDM在镜反射点(specular point,SP)处的功率最大,按照雷达公式,功率随着离SP距离的增大而减小,如图1(b)所示。而当海面出现目标时,由于反射点在区别于海面区域的目标光滑平面上,目标相对于粗糙海面,复介电常数会增大,因此得到的菲涅尔反射系数也会增大,将得到强回波信号,该回波信号会强于周围海面引起的回波,表现为功率的增大,例如以CYGNSS 2020年某幅DDM为例,如图1(c)所示,图中红色圆圈部分即为由目标引起的功率增强,利用此特性进行目标探测。
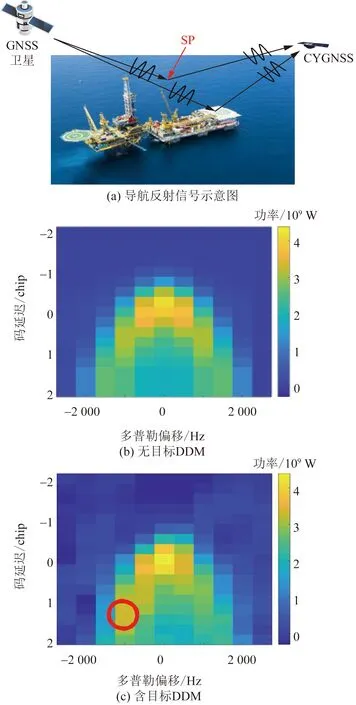
图1 DDM及目标场景Fig.1 DDM and target scenarios
DDM中的坐标刻度具有明确的物理意义。图2表示了GNSS-R 探测海面的双基地几何关系和DDM图中刻度的关系。图中GNSS卫星向海面发射电磁波信号,经过海面反射后,反射信号被CYGNSS卫星接收。图中绿色等时延线与红色等多普勒线是由发射星与接收星的位置与速度差异得来,若回波信号取相同码片延迟,则得到等时延线,表明该条线上目标的双基地距离相同。若取相同多普勒偏移量,则得到等多普勒线,表明该条线上目标具有相同的投影速度。而等多普勒线和等时延线的交点对应海面散射区域的一个散射点,表明该点反射的信号具有特定的码延迟与多普勒偏移。镜反射点位置则是通过入射角等于反射角和发射星与接收星之间电磁波反射路径总和最小的特性确定。
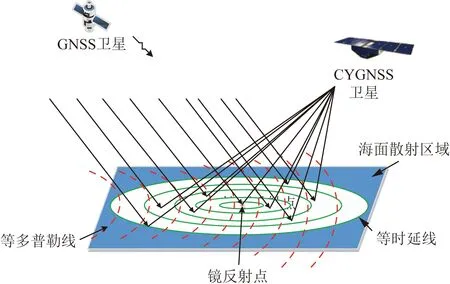
图2 双基地雷达几何模型Fig.2 Geometric model of bistatic radar
1.2 DDM中静态目标的检测
根据DDM中每个目标散射点的功率和海面散射点的功率大小不同的特性,采用功率差分计算求得DDM中目标的码延迟与多普勒偏移量。
首先,通过1.1节DDM特性,使用滑窗处理将SP轨迹分解为多个子区域范围,检索可能包含目标的DDM,接着将实验区域可能包含目标的DDM与邻近多幅无目标DDM经过平均计算出的海杂波DDM进行差分运算,然后通过硬阈值筛分检测潜在目标的码延迟与多普勒偏移[17]。例如,以CYGNSS的4号星的2020年某日的DDM为例,其检测过程如图3所示:图3(a)为包含目标的DDM,图3(b)为海杂波DDM,通过图3(a)与图3(b)差分运算,得到图3(c)的筛分结果,筛分结果出现两个强峰值,即图3(c)中1区域和2区域,其多普勒偏移与码延迟分别为(-1 000 Hz,1.5 chip),(-500 Hz,1 chip)和(-500 Hz,1.25 chip)。这两个点都是可能的目标。
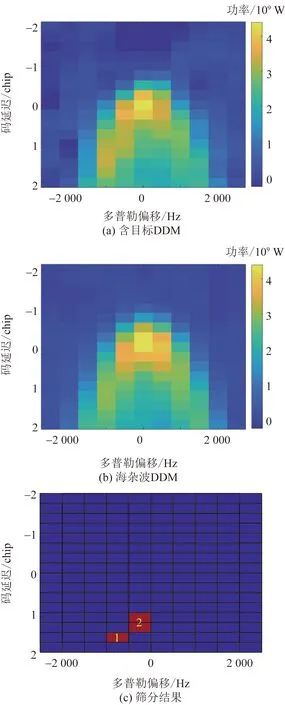
图3 14 189 s的DDM筛分过程Fig.3 The sieving process of 14 189 s’DDM
1.3 目标在LRF域的位置求解关系
为了得到检测出的目标在实际海面上的位置,需要进行从DDM到空间坐标系转换。文献[18]给出了GNSS-R的几何模型可细化如图4所示,根据镜反射点SP建立的本地坐标系,命名为本地参考坐标系(local reference frame,LRF),建立DD(delay-doppler)域τ-fd(延迟-多普勒)与LRF域x-y之间的关系,其中xoy平面是过SP与地球的切平面。

Tx为发射卫星;Rx为接收卫星;SP为镜反射点;h0为发射卫星距海面高度;h为接收卫星距海面高度;γ为发射卫星仰角;Rgps为发射卫星到地心距离;Re为地球半径图4 GNSS-R几何模型Fig.4 Geometry of the GNSS-R system
根据图4可以建立LRF域到DD域的映射关系[15],公式为

(1)
fd,xy=-VTycosγ-VTzsinγ+
(2)
式中:(x,y)为散射点在LRF域的坐标;(τxy,fd,xy)为该散射点在DD域上的码延迟和多普勒偏移;γ为GNSS卫星仰角;h为接收卫星到海面的高度;VT=(VTx,VTy,VTz)、VR=(VRx,VRy,VRz),分别为GNSS卫星和接收卫星的速度。由式(1)和式(2)的方程组给出了τ-fd与x-y之间的关系。在目标模拟中通常是已知x-y求τ-fd[16],实际上,需要得到目标真实位置(x,y),即通过已知τ-fd求解x-y。由于每一个延迟-多普勒单元(τ,fd)都对应着LRF域中两个不同散射单元[14](x1,y1)和(x2,y2),根据式(1)和式(2)反向求解得到的从τ-fd到x-y的映射关系模型为

(3)
式(3)中:i=1,2,为LRF域中两个不同散射点的解;Xi、Yi为映射关系函数。由于在求解的过程中应用到了处于LRF下接收星与GNSS卫星的高度与速度,但由于下载的CYGNSS数据都是处于地心地固坐标系(earth-centered earth-fixed,ECEF)下的原始数据,因此在后续坐标反解过程中需要进行坐标转换。
1.4 静态目标定位模糊问题
根据1.3节几何关系和公式,反向坐标映射会出现两个目标。其数学原因是式(3)会产生两组解,其物理原理如图5所示。图5(b)中蓝色圆环为等延迟线,红色双曲线为等多普勒线。图5(a)中黄色P区域在图5(b)即LRF域中会出现处于同一个等距圆与同一个多普勒线的A1与A2两个目标,它们虽然在DD域具有相同的码延迟与多普勒,但位于海面上不同位置,因此出现目标定位模糊。
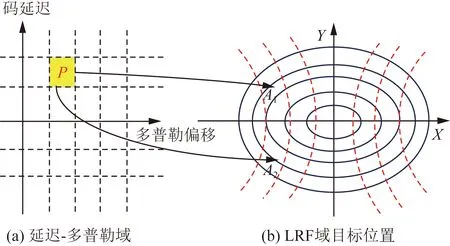
图5 延迟-多普勒域的映射关系Fig.5 The mapping of the delay-Doppler domain
例如,将图3(c)筛分的2个目标根据式(3)映射到LRF坐标系下,结果如图6所示,每组多普勒偏移与码延迟会对应2个散射区域,即图3(c)中1区域对应a1与b1,2区域对应a2与b2,其中a1和b1一个是真目标,一个是假目标,a2和b2同理,这就是目标定位模糊问题。

图6 14 189 s的DDM潜在目标位置Fig.6 DDM potential target location at 14 189 s
2 目标定位模糊去除及位置计算方法
2.1 多轨DDM去除假目标
通过利用多星轨迹DDM联合去除静态目标定位模糊问题。首先从DD域到LRF域的转换计算出本实验不同DDM的真假目标位置。为方便转换,引入站心坐标系(earth-fixed coordinate system,ENU)为中间坐标系。ENU的XOY平面是过镜反射点与地球的切平面,Y轴指向镜反射点的正北方向,X轴指向正东方向,Z轴指向法线方向,便于处于地心地固坐标系下GNSS卫星与接收卫星位置及速度的转换,由图7所示几何关系可以推导出 ECEF 到 ENU的转换矩阵,以海面镜反射点位置的发射星转换为例,其旋转矩阵[19]可表示为
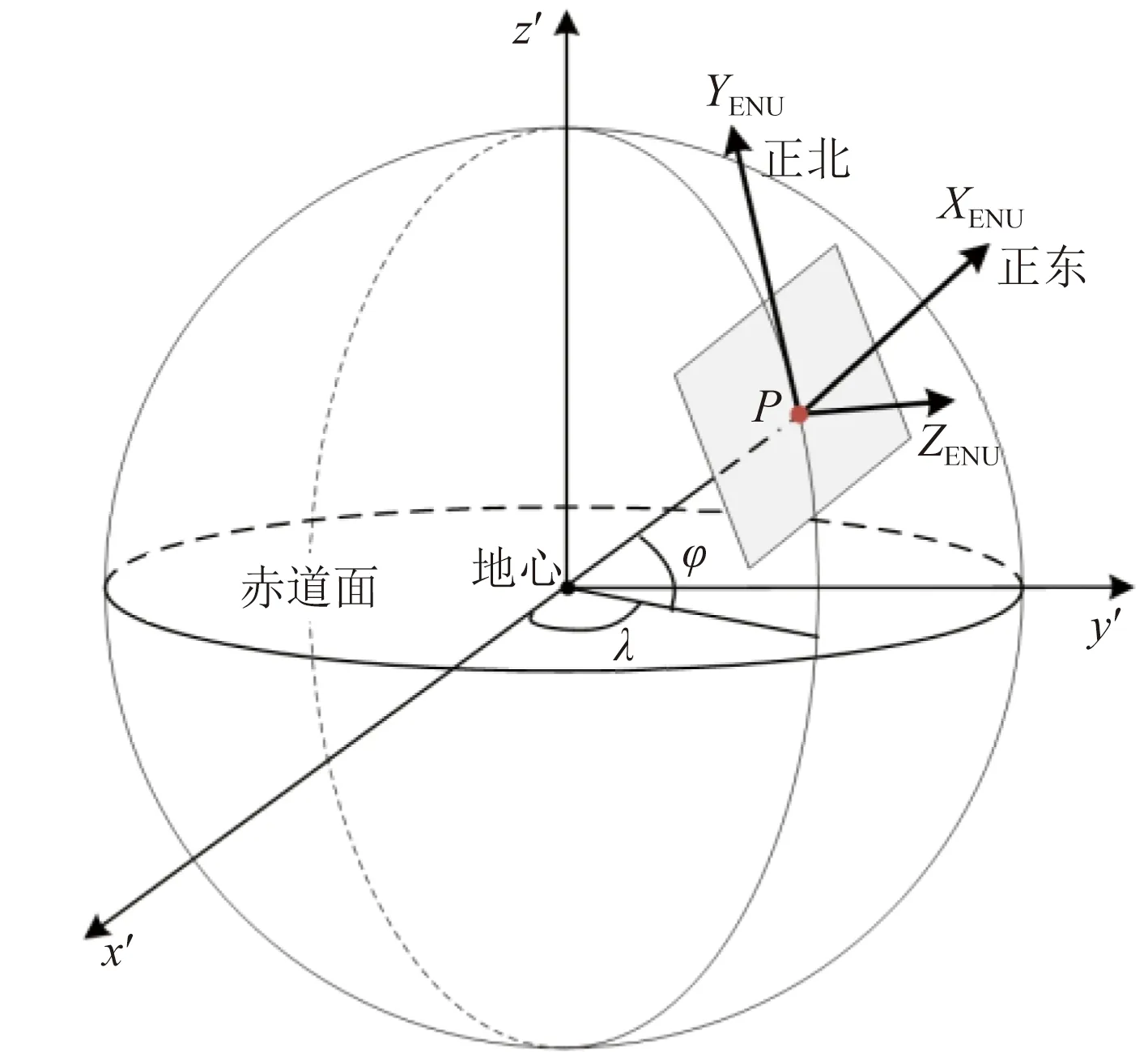
图7 ENU与ECEF几何关系Fig.7 Geometric relationship between ENU and ECEF

(4)
式(4)中:λ和φ分别为镜反射点的经度和纬度;Tx,enu、Ty,enu、Tz,enu分别为GNSS卫星在ENU中X、Y、Z轴的位置;Tx,ecef、Ty,ecef、Tz,ecef分别为GNSS卫星在ECEF中X、Y、Z轴的位置。根据式(4)可以将 GNSS卫星的位置及速度从ECEF转换到ENU中,接收卫星R同理,其位置分别记为Tenu、Renu。
ENU与LRF的差别在于X轴与Y轴的方向不同。由于实验设置的本地参考坐标系Y轴是GNSS卫星与接收卫星的连线,所以通过GNSS卫星及接收卫星的位置,通过图8几何关系可求得卫星方位,即Y/X轴的旋转角度,才能通过方位角计算目标在LRF域中的位置以及得到目标在海面真实位置。
图8中XOY平面代表ENU,X′OY′平面代表LRF。设GNSS卫星和接收卫星在 ENU中的投影坐标分别为Txy=[Tx,enu,Ty,enu],Rxy=[Rx,enu,Ry,enu],由此可将GNSS卫星与接收卫星在ENU下的连线向量设为u=[ux,uy],其角度设为θ,通过式(5)和式(6)可计算出两幅DDM的方位角差异值,公式为
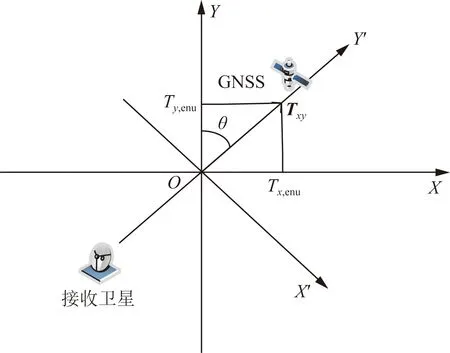
图8 LRF与ENU角度关系Fig.8 Angles between LRF and ENU
u=Txy-Rxy
(5)
θ=tan-1(ux/uy)
(6)
使用2020年某日样本作为示例,将计算的LRF域下的目标位置叠放入谷歌地球。
(1)单星情况。将所有目标统一到以某个SP为原点建立的坐标系,通过欧拉距离公式[式(7)],分别以每个目标为初始位置(x,y),设置一定阈值,将其他目标的坐标(xi,yi)分别代入计算,通过小于阈值保留聚集的目标,大于阈值去除分散的假目标,其形式如图9(a)所示。单星即同轨下SP1点的a2、b2目标与SP2点的c2、d2目标较为分散,而a1、b1目标与c1、d1目标间隔相近,但无法判断(a1,c1)和(b1,d1)的目标真假。

(7)
(2)多星情形。引入2020年不同轨迹的DDM进行多星轨迹下假目标去除,其结果如图9(b)所示。通过不同接收星,即不同轨迹下的DDM进行目标探测,所有真目标会在以(20°48′58.74″N,108°52′59.95″E)为中心聚集,而假目标会分散。
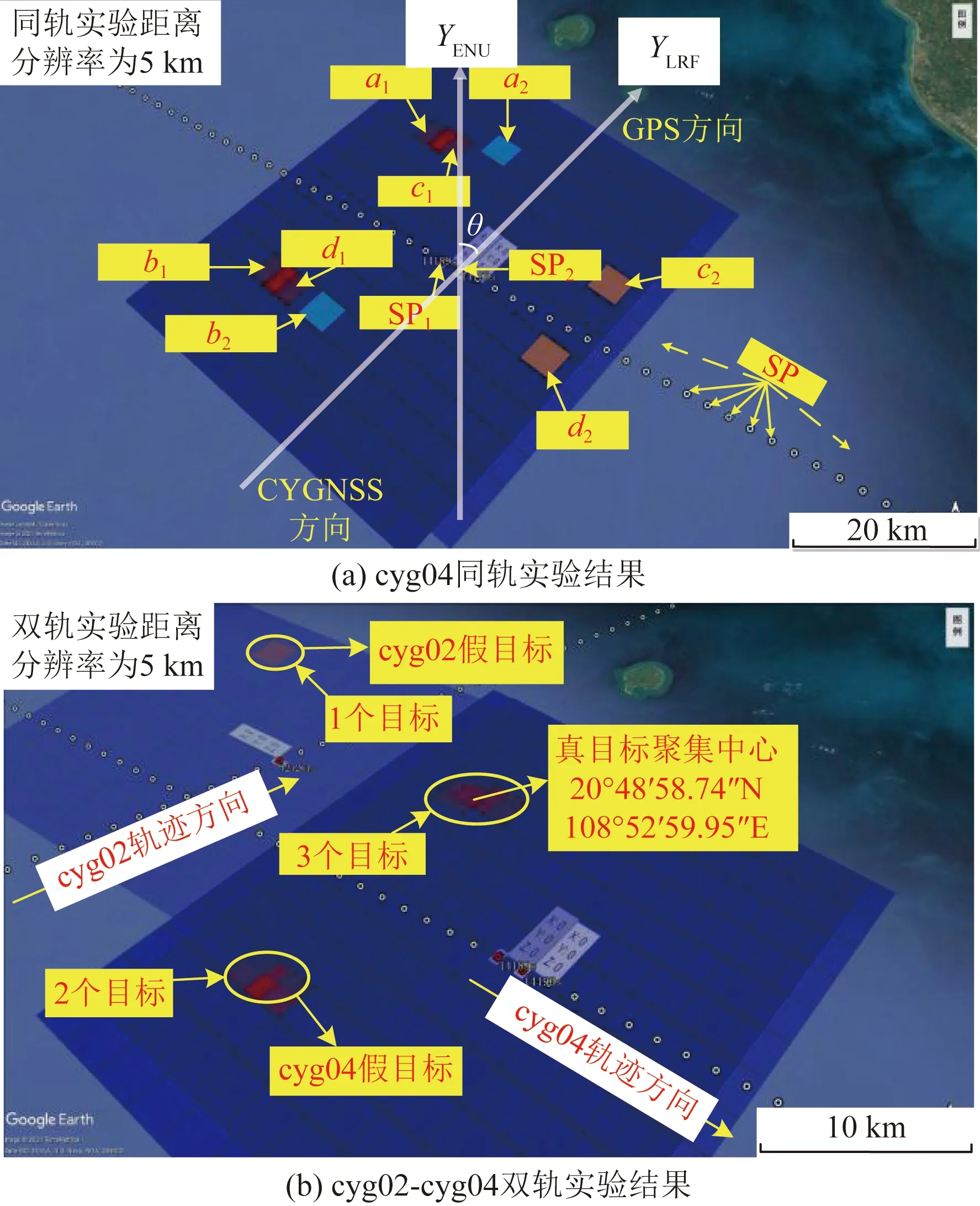
图9 单-双轨实验结果Fig.9 Single -dual track test results
2.2 真目标的位置计算
通过多星轨迹DDM联合去除假目标后保留的各个真目标需要计算目标的最终位置。图9只是在Google地图上定性给出了静态目标的聚集情况。由于计算出的目标都是以各自镜反射点为原点,目标的位置都是处于LRF下的,若想计算出真目标最终位置,需对每个目标进行坐标平移,使其全部处于一个坐标系下,有一个公共的原点。
以某SP为原点建立一个Y轴指向正北的直角坐标系,命名为“统一坐标系”。求解LRF下真假目标在统一坐标系下的相对位置,得到目标xi与yi,最终将处于统一坐标下的真目标通过均值运算,计算出本实验目标最终真实地理位置(xtrue,ytrue)。
(8)
(9)
3 实验数据验证
采用CYGNSS卫星的实测数据进行实验分析,其数据由美国航空航天局(NASA)提供(https://podaac.jpl.nasa.gov/),数据产品中包括了DDM数据以及本文算法所需的输入数据,如GNSS卫星、接收卫星的位置、速度,天线增益,发射信号功率,噪声等。
3.1 DDM映射过程
实验选取时间为2020年7月13日的7号星、7月10日的4号星和7月11日的2号星部分数据进行实验验证,其所取示例的DDM的卫星编号、反射通道、样本时间等数据,具体如表1所示。cyg02海杂波采样序号为121 248~121 259 s,cyg04海杂波采样序号为14 193~142 03 s,cyg07海杂波采样序号为169 950~169 960 s。映射过程如图10所示。

表1 数据信息Table 1 Data information
筛分结果计算的方位角和静态目标码延迟与多普勒偏移数据如表2所示。

表2 结果数据Table 2 Result data
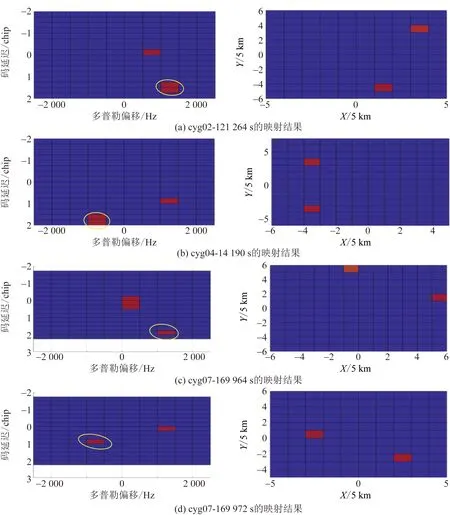
左列图为经过含目标DDM与海杂波DDM差分处理和阈值筛分后的目标筛分结果;右列图为在LRF域下目标的位置图10 映射过程Fig.10 The mapping process
3.2 静态目标探测结果
将计算出的每幅DDM中目标的位置,通过表2的方位角叠放入谷歌地图可得如图11所示结果。
由图11可以看出,所有轨迹下的5个真目标以(20°48′26.90″N,108°51′47.79″E)为中心聚集。而假目标只会因同一轨迹而有所靠近,即图11中cyg04轨迹下与cyg07轨迹下分别有两个假目标靠近,但没有足够的聚集度,且会因不同轨迹而分散。
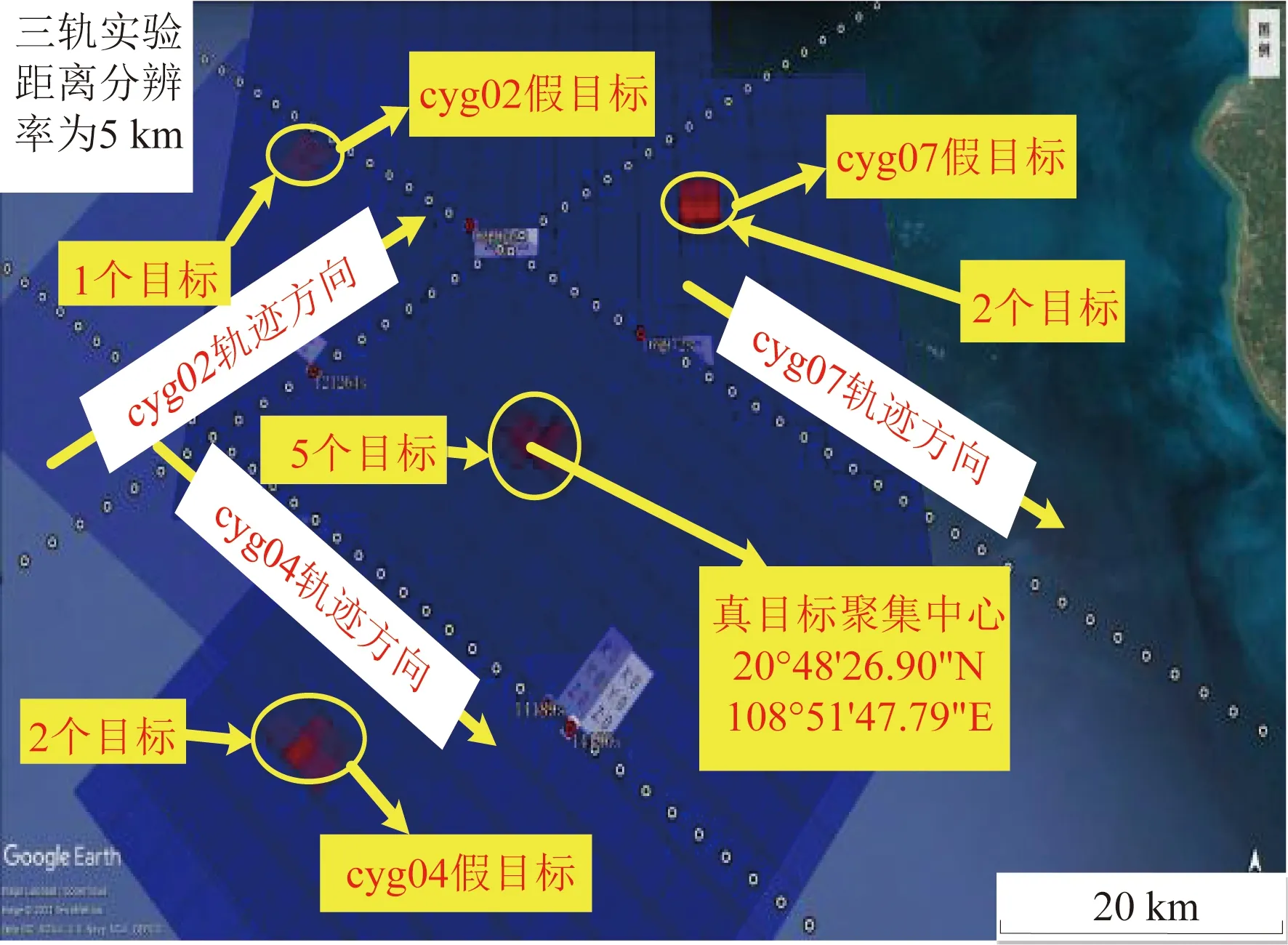
图11 三轨实验结果Fig.11 Tri-orbit experiment results
将聚集的真目标通过均值计算得到的结果如图12所示。
为了验证目标探测结果的准确性,查找实验时段的海区数据,发现实验数据时间和区域与“南海四号”钻井平台工作时间(2020年6月27日—2020年7月27日)和工作地点[以(20°48′13.54″N,108°52′20.95″E)为圆心,1.852 km为半径的圆形围闭水域]相吻合。

绿色圆圈为计算的真目标位置;红色叉号为计算的假目标位置;黑色星号为目标最终位置图12 目标分布的位置Fig.12 The location of the target distribution
“南海四号”是一个巨型自升式钻井平台。甲板面积相当于一个标准足球场大小,钻塔高80 m,是1个可探测的强反射体。工作时间范围由中国海事网提供(https://www.msa.gov.cn/page/search.do)。
通过图13可见,计算的最终目标与“南海四号”钻井平台工作区域的中心差距为1.04 km,符合其工作地点。由此可见本文方法可以去除静态目标定位模糊问题。

黄色图标为钻井平台工作中心;红色图标为目标最终计算位置图13 目标最终地理位置Fig.13 Target final geographic location
根据相同原理,选取2020年5月17日的2号星与2020年5月18日的6号星部分数据进行了实验分析,结果如图14所示。
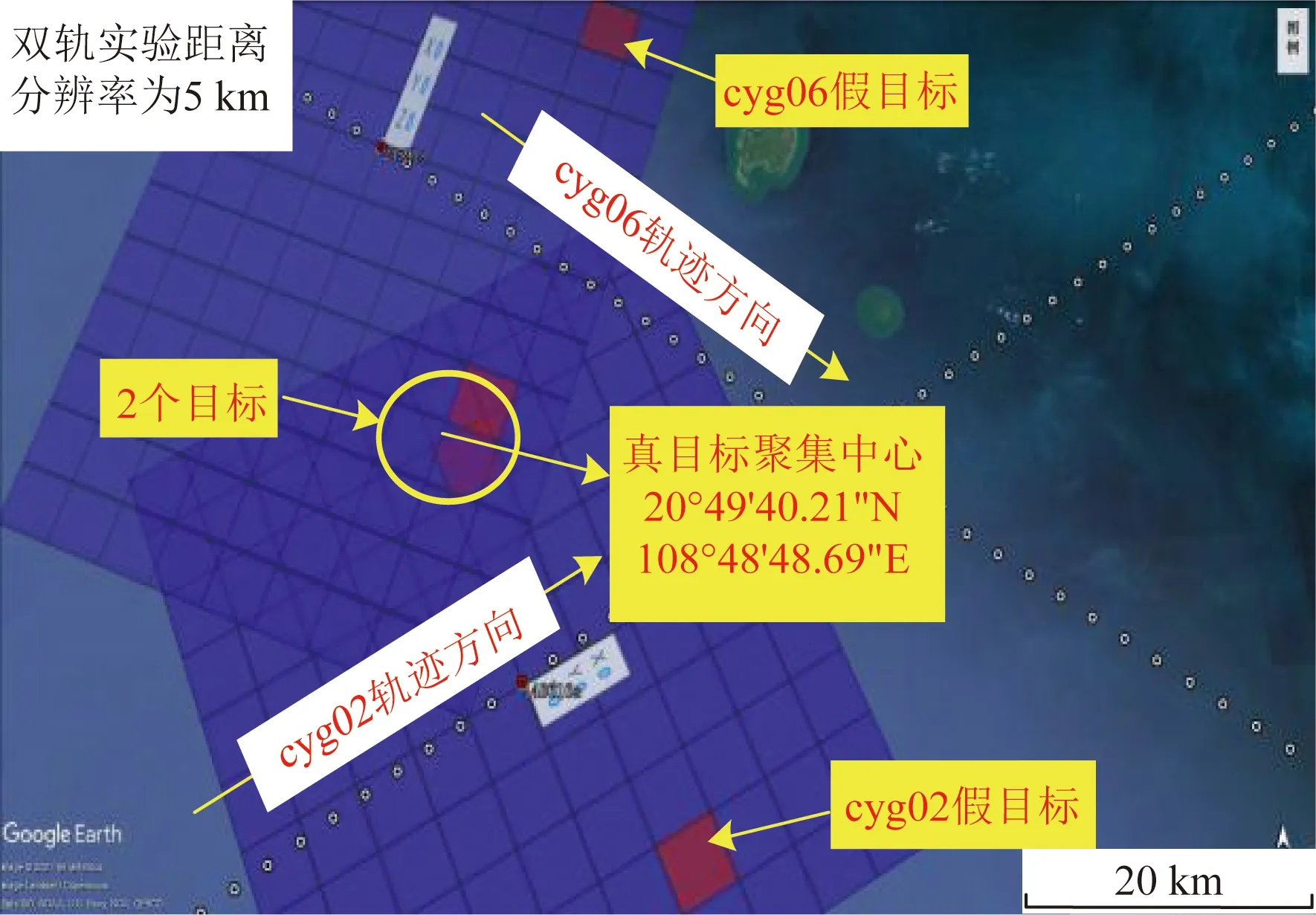
图14 cyg02-cyg06实验结果Fig.14 Experimental results of cyg02-cyg06
通过查找发现,实验数据时间和区域与“南海四号”钻井平台于2020年5月2日—2020年6月1日工作地点[以(20°49′08.59″N,108°49′25.25″E)为圆心,1.852 km为半径]相吻合。
将计算所得目标的位置与两个时间段“南海四号”钻井平台坐标定位于Googel地图,如图15所示。通过计算及图15可见,两次计算目标位置分别距中心为1.04 km及1.43 km,均符合“南海四号”钻井平台工作地点。

黄色图标为“南海四号”钻井平台工作范围中心;红色图标为5月27日—6月27日目标计算位置;绿色图标为5月2日—6月1日目标计算位置;红色圆圈为工作范围图15 目标与钻井平台位置的误差 Fig.15 Error between target and rig position
4 结论
对海面静态目标探测中目标定位模糊问题进行了研究,通过多星轨迹DDM联合去除假目标,利用假目标无效分散、真目标有效聚集的特点完成真目标的探测及假目标的去除。用CYGNSS实测DDM数据验证此方法能有效地解决目标定位模糊问题。但因分辨率的问题,在计算目标最终真实地理位置时可能会引起较大误差,今后将提高分辨率,从而提升目标探测的准确性,此外由于机动速度较快的目标在多个轨道(不同时间)的DDM图上的距离和多普勒位置不同,该方法需要进一步在距离延迟和多普勒补偿方面进行改进。
