基于变步长最小均方误差自适应滤波器的变压器机器鱼避障时延仿真
2021-12-02刘力卿魏菊芳唐庆华
王 伟,刘力卿*,魏菊芳,唐庆华,贺 春
(1.国网天津市电力公司电力科学研究院,天津 300384;2.天津市电力物联网企业重点实验室,天津 300384)
变压器是电力系统的关键设备之一,其健康状况对电网的安全稳定运行具有至关重要的作用,一旦变压器发生故障,将会造成巨大的经济损失。目前变压器故障的主要检测方法是局部放电检测法和油中溶解气体分析法[1]。张利伟[2]综述了现有油浸式电力变压器故障诊断方法的优缺点和局限性,指出开展多诊断方法、多特征信息融合必要性。近年来,随着人工智能技术和微小型机器人技术的快速发展,通过微型机器鱼进入变压器油中进行巡航检测的方法引起了研究人员的关注,该方法能够进行变压器内部器件更直观的检测和早期的故障诊断和预警[3]。ABB公司最早开展了油浸式变压器内部巡检机器人的研发,阐述了巡检机器人的设计理念和技术创新性[4]。中国近几年才开始对变压器巡检机器人的研究,国家电网天津电力科学研究院王伟等[5]分析了采用机器鱼进行变压器内部巡检的优势和可行性,开展了变压器微型机器鱼的姿态定位研究。机器鱼在变压器内部进行巡检时面临的难题是:变压器内部设备组件多、并且部分区域空间狭窄,机器鱼容易与内部设备发生碰撞。因此,避障(避免和障碍物发生碰撞)是机器鱼在变压器内部巡测过程中的必须要解决的关键问题之一。目前机器人领域常用避障方法主要包括激光雷达、机器视觉、超声测距以及GPS辅导导航等[6-10]。但是由于变压器内部环境的特殊性,例如:变压器金属外壳对外部GPS信号具有一定的屏蔽作用,导致外部导航信号难以进入变压器内部;变压器内部无光照能见度低;变压器油对雷达波和高频电磁波衰减严重等,这些条件客观上增大了变压器机器鱼的避障难度。考虑到超声方法具有方向性好、无需光照条件、在变压器油中探测范围广、障碍物测距精度高的特点,因此,超声方法是一种有效可行的机器鱼的避障方法。
超声避障方法的核心是计算发射信号与障碍物反射回波信号之间的时延信息(该时延信息乘以声速即为距离)。经典的时延估计方法主要包括上升沿触发法、阈值触发法、互相关方法、广义互相关法以及在此基础上的一些改进方法等[11-13],例如,窦慧晶等[14]提出了一种基于二次相关的广义互相关时差估计算法应用于卫星干扰源的时延定位,通过广义互相关加权和二次相关共同来抑制噪声干扰;齐小刚等[15]提出了一种基于奇异值分解的HB(Hassab-Boucher)加权广义互相关时延估计,通过在互功率谱计算时引入HB加权函数,达到锐化互相关函数峰值的目的,去除时延估计结果中的异常值波动。广义互相关方法能够提高低信噪比(signal to noise ratio,SNR)条件下的时延估计精度,但是需要信号和噪声的统计先验知识,这在实际在线测量中往往是无法满足的。最小均方误差(least mean square,LMS)自适应滤波算法通常用于信号的滤波和系统的辨识,在时延估计上的应用起步较晚。相对于上述经典时延估计算法,LMS自适应滤波是一种新型的时延估计算法,无需信号和噪声的统计先验知识,通过步长迭代算法自动调节自身参数,从而实现最优滤波和时延估计,具有结构简单、计算量低、性能稳定等优点[16-17]。吴慧娟等[18]分析了LMS时延估计器中有偏和无偏估计算法的时延估计性能,验证了低信噪比下采用LMS进行时延估计的有效性。传统LMS自适应滤波算法中迭代步长是固定的,在一定程度上会对自适应算法的收敛速度和稳态误差造成影响。
针对变压器内部结构复杂、噪声大、机器鱼避障时延估计难度大等问题,现提出一种基于变步长LMS自适应滤波器的变压器机器鱼避障时延估计方法,旨在通过滤波器参数的自适应调节,起到准确计算时延的目的。
1 机器鱼超声避障原理
机器鱼身上各个方向(上、下、左、右、前、后)安装有收发一体化的超声探头,通过探头发射超声信号、接收反射回波信号、时延估计算法实现机器鱼的避障功能。一旦机器鱼距离障碍物的时延值接近于机器鱼的制动时间,机器鱼就要进行制动或者进行转弯操作从而避免发生碰撞。机器鱼结构示意图如图1所示。

图1 变压器机器鱼示意图Fig.1 Schematic diagram of transform robot fish
假设机器鱼发射的超声信号为

(1)
式(1)中:s(t)为发射的超声信号;Ai为信号幅值;fi为信号频率;φi为信号的相位。
超声传递函数为
H(f)=e-j2πfD
(2)
式(2)中:D为时延值;H(f)为传递函数。接收的反射回波信号可以表示为
r(t)=s(t-D)=F-1[S(f)H(f)]=
h(t)s(t)
(3)
式(3)中:r(t)为反射回波信号;S(f)为发射信号s(t)的傅里叶变换;F-1为傅里叶逆变换;h(t)为传递函数H(f)的傅里叶逆变换。
(4)
由式(4)可以看出,信号的时间延迟可以转化为信号通过一个单位冲激响应为sinc函数的横向滤波器。因此,时延估计问题可以转化为滤波器参数的估计问题,通过对滤波器参数进行sinc函数插值就能够实现准确的时延估计。
2 LMS自适应滤波器时延估计算法
采用自适应滤波器进行时延估计的原理是:设计有限脉冲响应滤波器(FIR滤波器),通过自适应算法迭代求解滤波器的权系数向量。图2为LMS自适应滤波器结构图。
滤波器的抽头的输入向量为
X(n)=[x(n),x(n-1),…,x(n-M+1)]T
(5)
n时刻的权系数向量为
W(n)=[w1(n),w2(n),…,wM(n)]T
(6)
滤波器的输出y(n)可以表示为输入向量与权系数向量的内积之和,即
(7)
则系统的输出误差为
e(n)=y(n)-d(n)
(8)
因此均方误差可表示为
J(n)=E[e2(n)]=E{[d(n)-WTX]2}=
E[d2(n)]-2E[XTd(n)W]+
E[WTXXTW]
(9)
式(9)中:E为期望。
定义矩阵P为输入向量与期望响应的互相关矩阵,矩阵R为输入向量的自相关矩阵,则矩阵P和R的表达式为
(10)

M为滤波器阶数;x(n)为滤波器输入信号;d(n)为期望响应信号;W(n)为滤波权系数;y(n)为滤波器输出;e(n)为滤波器输出y(n)与期望响应d(n)的误差图2 LMS自适应滤波器结构图Fig.2 Structure diagram of LMS adaptive filter
R=E[X(n)X(n)T]=

(11)
将矩阵P和R的表达式代入J(n),得
J(n)=E[d2(n)]-2PTW(n)+
W(n)TRW(n)
(13)
LMS自适应滤波器的目标是寻找一组最佳权系数向量,使得系统的均方误差J(n)达到最小值。将上式对W(n)进行求导并令导数为零,即得到最佳权系数向量为

(14)
均方误差最小的最优滤波器权系数向量为
Wopt=R-1P
(15)
由公式推导可知,只要已知自相关矩阵R和期望信号与互相关矩阵P,就可以直接求解最优权系数向量Wopt,但是在实际工程应用时频繁对矩阵进行求逆运算会极大增加计算量。LMS算法采用瞬时均方误值代替真实的均方误值,通过最速下降法沿均方误差性能曲面的最陡方向(负梯度方向)逐渐向下搜索最终获得最佳权向量,梯度计算公式为

(16)
权向量计算公式为

W(n)+2μe(n)X(n)
(17)
式(17)中:μ为迭代步长。将n+1时刻的权向量误差定义为
V(n+1)=Wopt-W(n+1)=Wopt-W(n)+
μ[-RWopt+RW(n)]=
(I-μR)V(n)
(18)
式(18)中:I为单位矩阵。对互相关矩阵R进行特征值分解得

(19)
式(19)中:Q为酉矩阵;Λ为特征值对角矩阵。为了保证算法的收敛性,迭代步长应满足:
-1<1-μλk<1,k=1,2,…,M
(20)
由于自相关矩阵R的所有特征值都是正实数,因此,算法的收敛条件为

(21)
式(21)中:λmax为相关矩阵R的最大特征值。
传统的LMS波波器算法中,迭代步长μ为常数。为了使算法能更快地收敛,采用改进的变步长的方法,步长计算公式为

(22)
式(22)中:a、b为调节因子。
当自适应滤波器收敛之后,均方误差达到最小值,对此时的权向量W(n)进行sinc函数插值即可获得时间延迟为

(23)
3 仿真验证
为了验证算法时延估计的准确性,对算法进行了仿真。仿真条件如下:发射的超声信号为零均值平稳随机序列,噪声信号为高斯白噪声;采样频率为1 MHz,发射信号和反射回波信号的时延值D设置为100个采样点。自适应滤波器的阶数参数M=300,权向量W(n)的初始值均为0。变步长调节因子a=10,b=1。机器鱼发射的超声信号和接收的回波信号如图3所示。

图3 发射和接收信号Fig.3 Ultrasonic transmit and receive signals
3.1 LMS自适应滤波器时延估计结果
变步长LMS自适应滤波器的步长变化和均方误差结果如图4和图5所示。
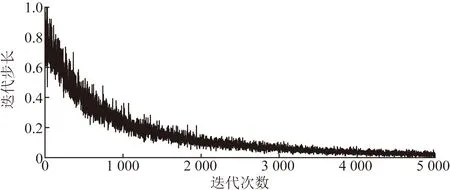
图4 迭代步长变化Fig.4 Change trend of iteration step size
通过图4可以看出,迭代开始阶段,步长初始值大而且波动严重,随着迭代次数的增大,步长逐渐变小并且趋于稳定。
通过图5可以看出,随着迭代次数的增加,均方误差越来越小,在迭代1 300步左右均方误差接近0.01,随着迭代误差的增加,均方误差在0.005左右波动。当超过3 000步时,滤波器输出向量y(t)和期望响应r(t)如图6所示,可以清楚地看到y(t)已经非常逼近r(t)。
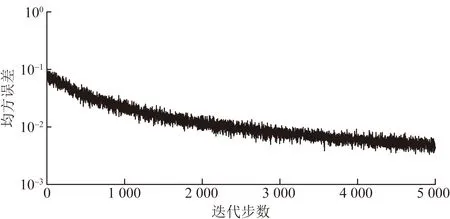
图5 均方误差变化Fig.5 Change trend of mean square error
通过图4~图6可以看出,设计的滤波器能够追踪输入信号的变化,归一化的滤波器权向量时延估计结果如图7所示。
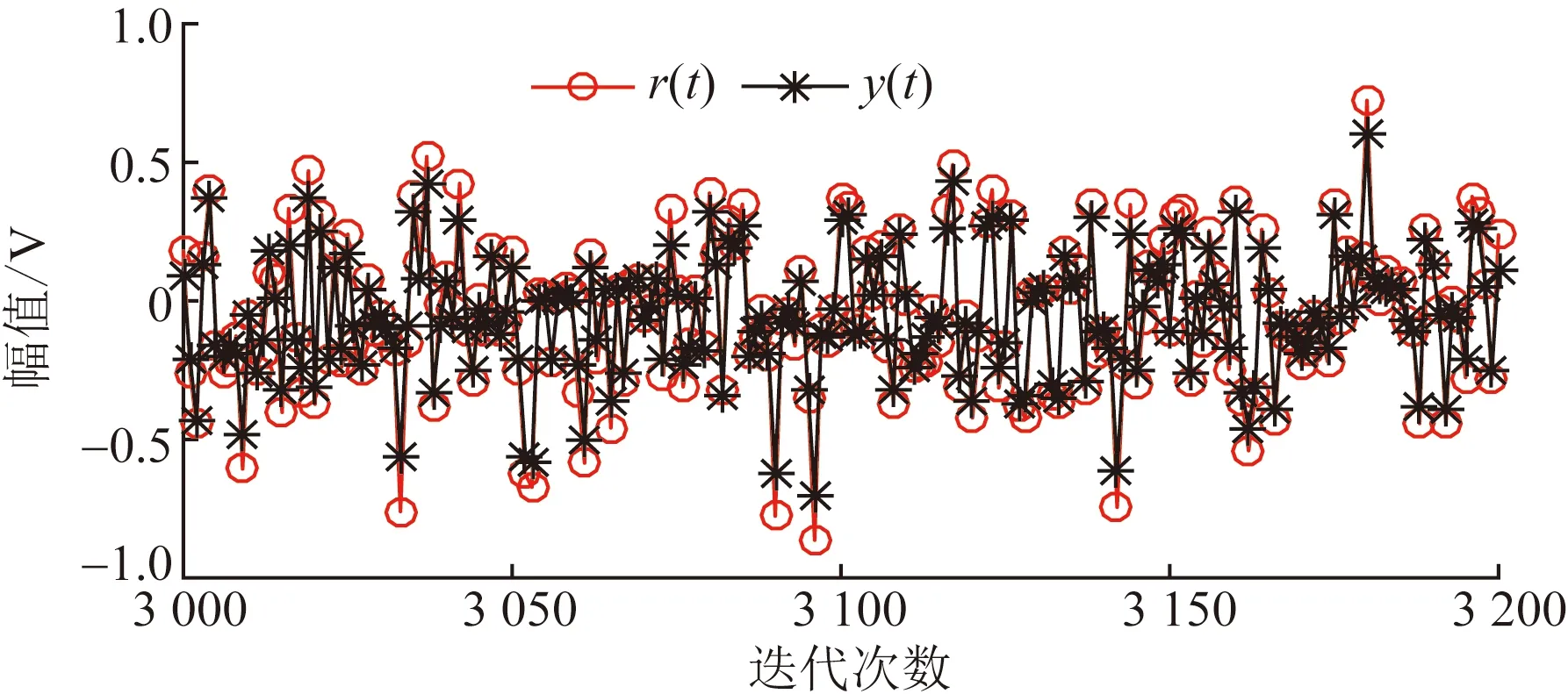
图6 滤波器输出响应Fig.6 Response of filter output
通过图7可以看出,最权系数出现的位置为100,与设置的时延值相同。
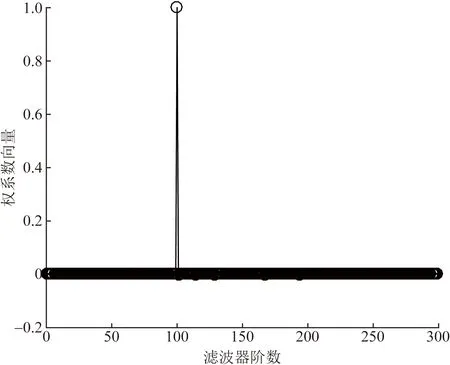
图7 权向量时延估计结果Fig.7 Time delay estimation results by weight vector
3.2 抗噪声性能分析
为了验证算法的抗噪声性能,通过对接收反射回波信号添加噪声改变信号的信噪比,模拟的信噪比条件分别为10、0、-10 dB;并且将所提算法与传统互相关算法进行了比较。图8为不同信噪比的超声发射信号和反射回波信号;图9为不同信噪比的LMS自适应滤波器和传统互相关时延估计结果。
通过图8可以看出,随着添加的噪声逐渐增多,反射回波信号的幅值逐渐变大。信噪比为10 dB时,还能够从波形中通过设置阈值的方法预估出时延值,但是信噪比降低到0 dB和-10 dB时已经无法预估出时延值。不同信噪比条件的时延估计结果如图9~图11所示。

图8 不同信噪比接收信号Fig.8 Ultrasonic receive signals under different SNR
通过对比图9~图11可以看出:不管是LMS自适应滤波器还是传统互相关方法,随着信噪比的降低,峰值相对于周边数值的尖锐程度逐渐变低,说明两种方法的时延估计结果随着信噪比降低都变差。由于自适应滤波器进行了归一化,因此表现为峰值数值不变,周边数值逐渐变大,从而影响了峰值的尖锐程度。传统互相关方法表现为峰值逐渐降低,周边数值变化不大,也说明了峰值的尖锐程度变差。通过对比图9~图11中的LMS自适应滤波器的时延估计结果和传统互相关的时延估计结果可以发现:自适应滤波器的峰值尖锐程度相对于传统互相关方法要更加明显,因此,LMS自适应滤波器的结果优于传统互相关的结果。
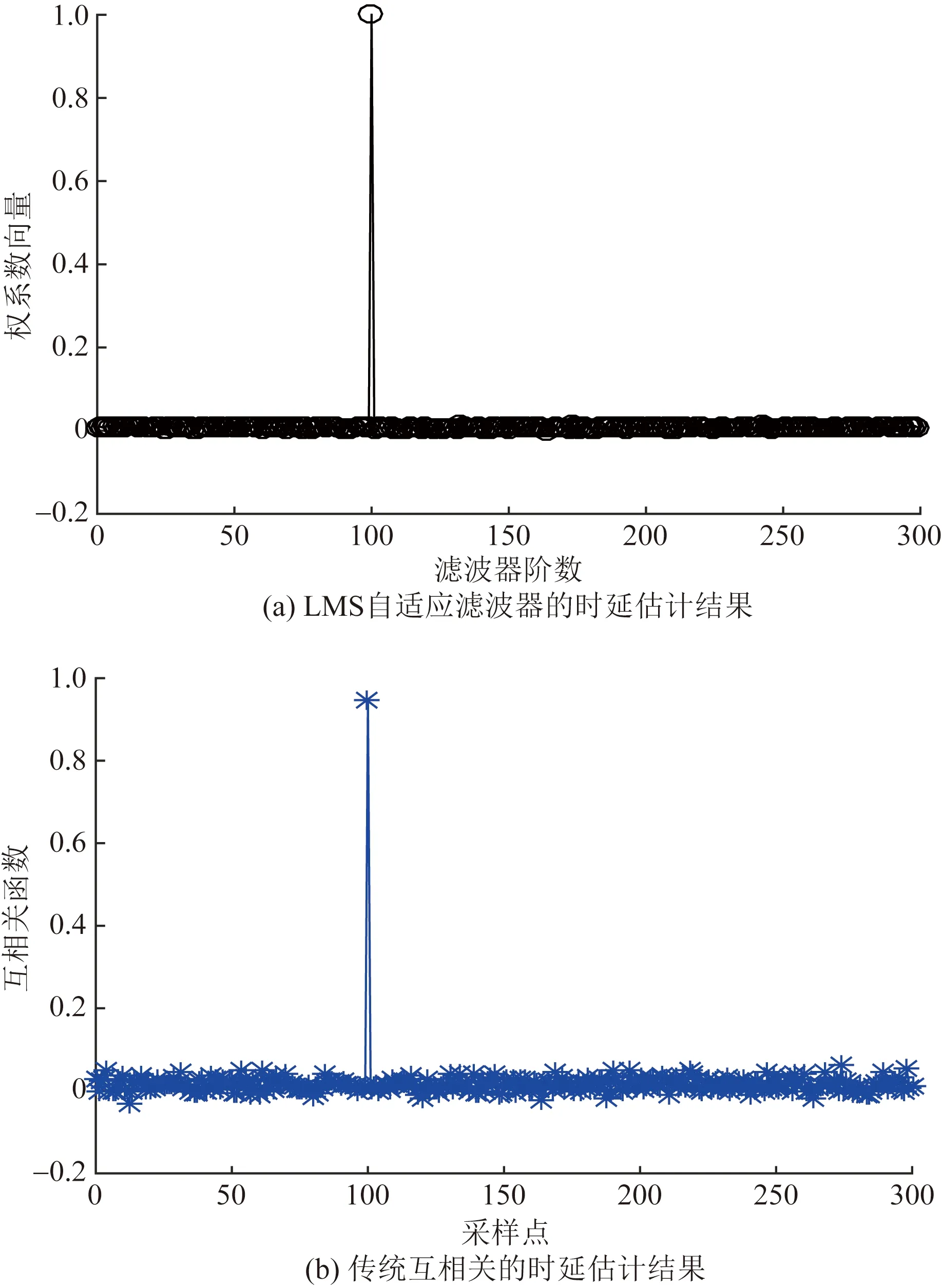
图9 信噪比为10 dB的时延估计结果Fig.9 Time delay estimation results under SNR=10 dB
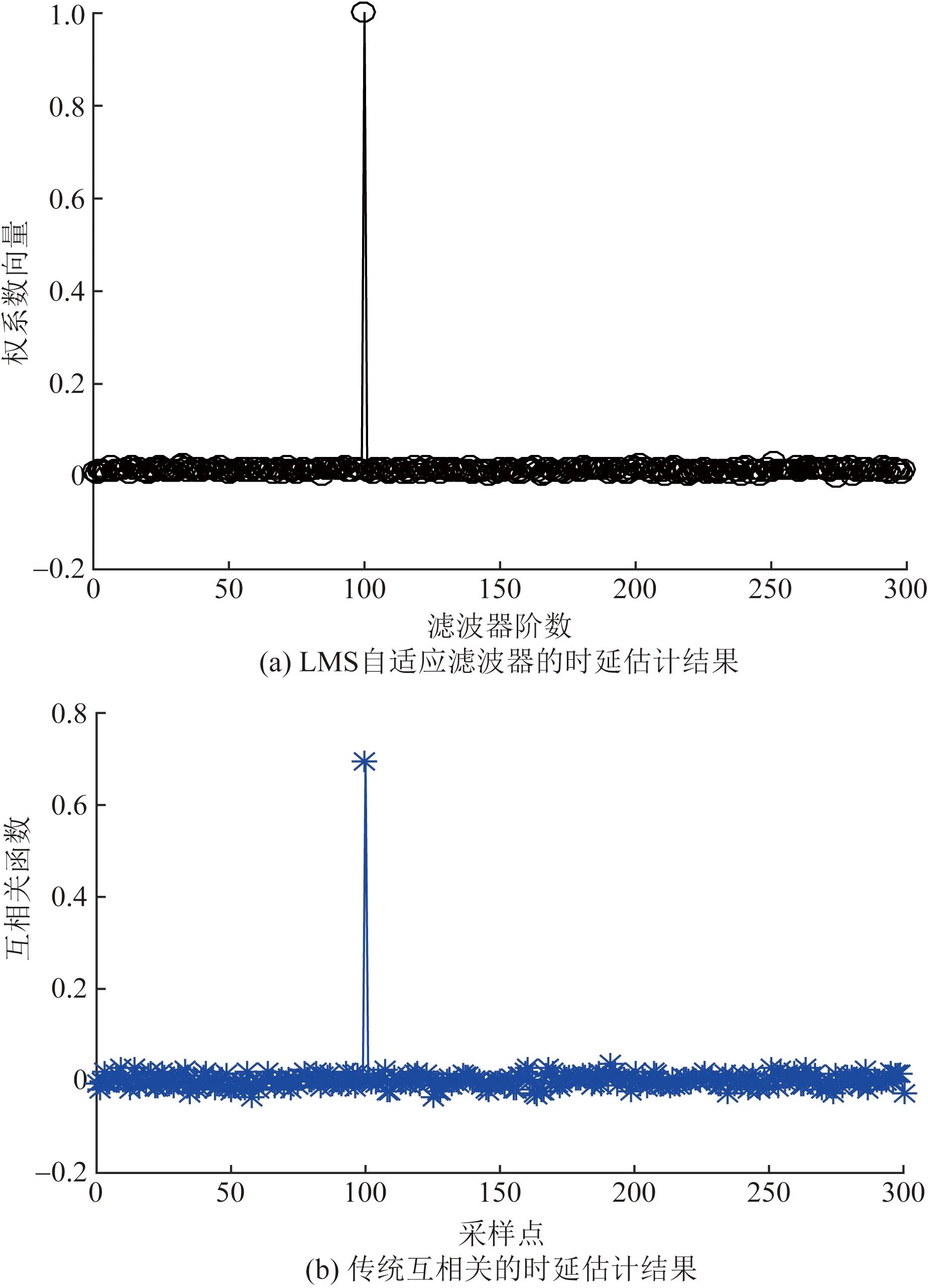
图10 信噪比为0 dB的时延估计结果Fig.10 Time delay estimation results under SNR=0 dB

图11 信噪比为-10 dB的时延估计结果Fig.11 Time delay estimation results under SNR=-10 dB
4 初步的实验验证
为验证所提的变步长LMS自适应滤波器的变压器机器鱼时延估计的有效性,用现有的变压器巡检机器人样机进行了测试,其结构如图12所示。

1为机器人主体外壳;2为超声传感器;3为视觉装置;4为红外测距模块;5为机器人垂直螺旋桨推进装置;6为机器人水平螺旋桨推进装置;7为压力传感器以及机器人控制系统图12 变压器巡检机器人结构图Fig.12 Structure diagram of transformer inspection robot
采用提出的时延估计方法,获得的实验结果如图13所示。通过图13可以看出,权系数向量最大值对应的滤波器阶数即是设计的时间延迟值,误差为2%,因此,实验结果验证了所提方法的有效性和准确性。
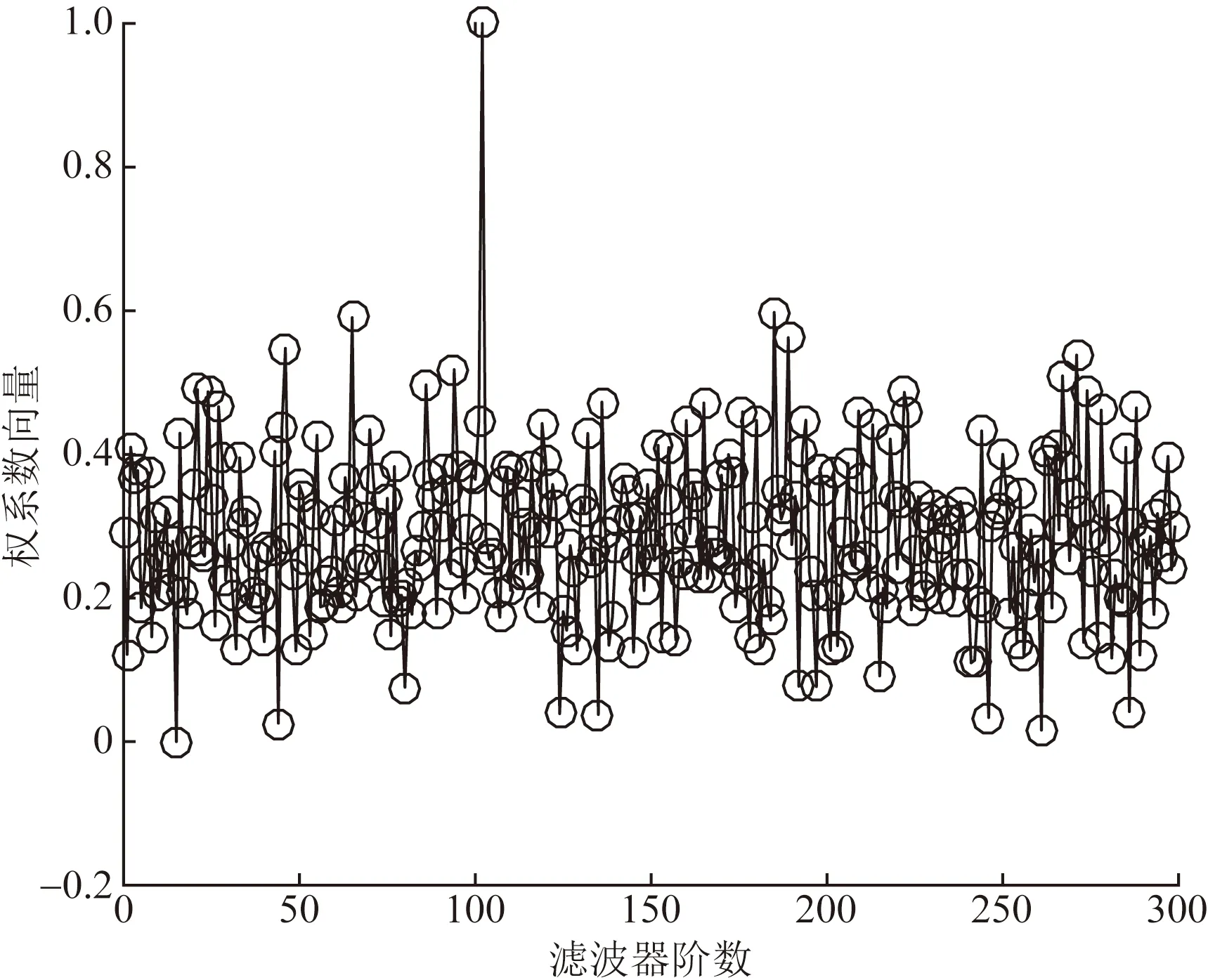
图13 实验结果Fig.13 Experimental result
5 结论
针对变压器机器鱼避障时延估计问题,提出一种基于变步长LMS自适应滤波器时延估计算法,通过仿真分析了变步长LMS自适应滤波器的步长和均方误差随迭代步数增加的变化趋势;对比分析了不同信噪比(10、0、-10 dB)条件下,LMS自适应滤波器和传统互相关方法的时延估计性能,研究结果表明采用LMS自适应滤波器的结果优于传统互相关的结果。
