基于散射电场的地面背景下风电机叶片回波模拟
2021-12-02代朝阳
黄 力,代朝阳,唐 波,刘 钢
(1.三峡大学电气与新能源学院,宜昌 443002;2.三峡大学湖北省输电线路工程技术研究中心,宜昌 443002)
风能作为一种清洁能源,风力发电近年来被广泛使用[1],风电机叶片动态旋转运动会对周边的雷达站产生严重的无源干扰[2-3]。通过风电机叶片回波独特的多普勒特征准确识别出风电机回波,进而在信号中将其滤除是当前解决此问题的主流方法[4]。而风电机叶片与地面之间的多径散射对风电机回波有较大影响,要获取准确的风电机叶片回波信号,地面这一因素必须加以考虑[5]。
为准确获取地面背景下风电机叶片的多普勒特征,中外学者对此做了大量研究。Zhang等[6]和Kong等[7]通过制作风电机缩比模型来测量地面背景下风电机雷达回波来获取地面背景下风电机叶片的多普勒特征,但此法由于操作复杂且成本较高,一般用于数值计算的验证。有研究者在考虑地面对风电机叶片回波的影响时,将散射点积分算法与多径效应相结合,对地面背景下风电机叶片的雷达回波进行了模拟[8-10]。但是此法在求解过程中假设风电机叶片的散射点沿着轴线等间距分布且各散射点的散射系数相同,把形状复杂的风电机叶片简化成了线模型,忽略了风电机叶片复杂异形曲面,所以无法准确模拟出地面背景下风电机叶片真实的回波。
究其原因,上述研究局限于用离散的散射点代替风电机叶片连续的面元,无法体现出风电机叶片在被雷达信号照射时叶片感应电流在其表面分布的连续性,从而无法模拟出风电机叶片表面的真实散射情况。为此,现从高频散射理论出发,结合多径效应提出基于散射电场的地面背景下风电机叶片回波模拟方法,为风电机叶片雷达回波的识别与杂波抑制提供理论参考。
1 传统地面背景下风电机叶片回波算法
1.1 地面背景下雷达信号的传播路径
根据高频散射的局部性原理,可将目标与地面之间的复合电磁散射简化为多条路径。而信号在传播过程中每次散射都会损失一定能量,散射的次数越多,损失的能量就越多,对雷达造成的无源干扰也越弱。根据文献[11]可知,在考虑地面的多径散射时可忽略地面与目标之间3次及3次以上的电磁散射。则可将风电机叶片与地面之间的复合电磁散射简化为以下4条路径[11],如图1所示。
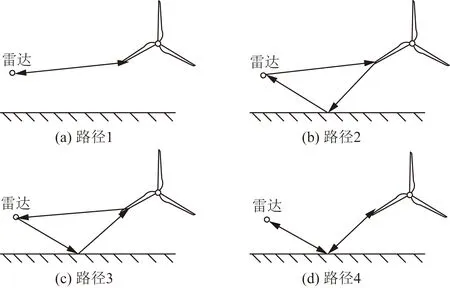
图1 路径传播示意图Fig.1 Schematic diagram of path propagation
路径1:雷达—叶片—雷达。
路径2:雷达—叶片—地面—雷达。
路径3:雷达—地面—叶片—雷达。
路径4:雷达—地面—叶片—地面—雷达。
1.2 传统地面背景下风电机叶片雷达回波算法
根据传播路径,路径1的回波可看作自由空间中风电机叶片的回波,将地面考虑成镜面,路径4的回波可看作自由空间中关于地面的镜像风电机叶片的回波。图2为引入风电机关于地面镜像后的几何关系图。雷达关于镜像风电机叶片的方位角α′=α。在三角形OO′R中,OO′长度为2H,OR长度为r,OO′与OR的夹角为π-β均为已知,通过解三角形可求解出雷达到镜像风电机叶片的距离r′、雷达关于镜像风电机叶片的俯仰角β′。
r′、α′、β′确定后,结合文献[12]空间任意观测点风电机回波信号即可求解镜像风电机雷达回波信号,进而可得4条路径的风电机叶片回波信号。
将求得的4条路径的风电机叶片回波进行矢量叠加,即可得到地面背景下的风电机叶片回波Sblade(t)。此法在求解过程中将风电机叶片简化成了线模型,无法体现出叶片感应电流在其表面分布的连续性,故不能考虑风电机叶片形状对回波的影响。同时在求解过程中,假设风电机的散射点沿着轴线等间距分布且各散射点的散射系数相同。而且所采用的散射点积分算法将离散的散射点进行积分处理,忽略了散射点的离散特性。所以其结果与实际有较大差异,只能用于定性分析。

L为叶片长度;H为塔架高度;r为雷达到风电机中心的距离;α、β分别为风电机叶片的方位角和俯仰角;β′为雷达关于镜像风电机叶片的俯仰角;r′为雷达到镜像风电机叶片中心的距离图2 传统地面背景下风电机叶片回波求解几何示意图Fig.2 Geometric diagram of wind turbine echo solving in the presence of ground
2 基于散射电场的地面背景下风电机叶片回波模拟方法
2.1 雷达回波与散射电场的数学关系
根据文献[12]可知,风电机叶片上任意散射点的回波公式为
s(t)=exp(j2πfct)exp[-j4πR(t)/λ]
(1)
式(1)中:λ和fc分别为雷达信号的波长和频率;R(t)为该散射点到雷达的距离;恒定载波项exp(j2πfct)作为信号的载体,没有储存有用的信息,回波的有用信息储存在基带信号exp[-j4πR(t)/λ]中。
散射电场在时谐电磁场中的表达式为
Es(r,t)=Es(r)cos[2πfct+φ(r)]
(2)
对式(2)用复数取实部的方法,可得

(3)

对比式(1)和式(3)可知,回波中基带信号与目标散射电场中的复振幅矢量相对应,所以求解出目标的散射电场即可转化为目标的回波信号[13]。
2.2 风电机叶片各路径的散射电场求解
风电机叶片与地面之间的复合电磁散射可以简化成在镜像方向上场的相互作用,因此风电机叶片与地面之间的复合电磁散射可简化为风电机叶片与无限大平面的相互作用,其总场可以用4条路径的散射场的相干叠加来表示。
如图3所示,路径1(①→②)雷达信号在直接照射风电机叶片后回到信号接收端是风电机叶片的单次散射场;路径2和3(①→②→③)分别为风电机叶片前向散射电场经过地面反射后的散射场和地面反射场经过风电叶片机散射后的场;路径4(①→②→③→④)是地面反射场经过风电机叶片散射后再通过地面反射后的场。由于路径1是雷达信号直接照射风电机叶片再回到信号接收端,若雷达信号的入射方向为βi,直接计算风电机叶片在自由空间中在βi方向上的单站散射电场即可得到路径1对应的散射电场Epath-1。四路径模型通常会结合镜像等效原理来分析[14],即将风电机叶片与地面的耦合路径(路径2,路径3,路径4)用风电机叶片在自由空间的双站路径来进行等效,这样可以通过计算风电机叶片在自由空间中的双站散射场的方法得到耦合路径的散射场。如图2所示,路径2的等效路径为①→②→④,若雷达信号的入射方向为βi,则计算风电机叶片在自由空间中π-βi方向的双站散射电场即可得到路径2对应的散射电场Epath-2;路径3的等效路径为①→④→⑤,若雷达信号的入射方向为βi,计算镜像风电机叶片在自由空间中π-βi方向的双站散射电场即可得到路径3对应的散射电场Epath-3;路径4的等效路径为①→⑤→⑥→④,若雷达信号的入射方向为βi,计算镜像风电机叶片在自由空间中βi方向的双站散射电场即可得到路径4对应的散射电场Epath-4。

分别为电磁波入射方向和散射方向的单位矢量;为电磁波镜像散射方向的单位矢量图3 风电机叶片多路径复合散射示意图Fig.3 Schematic diagram of multipath composite scattering of wind turbine blades
四路径模型将风电机与地面之间的复合电散射分解成多个散射路径的相干叠加。由局部性原理可知,在高频条件下可以近似认为风电机表面各部分独立地散射能量。因此可以把风电机分解成若干部分,风电机叶片表面用三角面元进行剖分,而两个相邻的三角面元可以构成一个劈结构,借助散射振幅矩阵[15]的概念可以把第k个劈结构的4条路径的散射场表示为

(4)
(5)
(6)
(7)

(8)

(9)

(10)
(11)

(12)
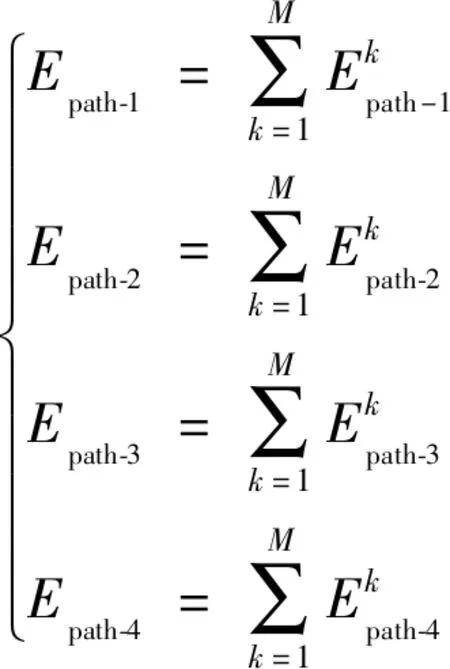
得到各路径的散射场后,将各路径的散射场进行叠加即可得到风电机与地面复合电磁散射的总场,即
E=Epath-1+Epath-2+Epath-3+Epath-4
(13)
在得到地面背景下风电机叶片对应的散射电场E后,根据2.1节的散射电场与回波的关系即可得到地面背景下风电机叶片的雷达回波。
3 地面背景下风电机叶片回波模拟
3.1 地面背景下风电机叶片各路径回波模拟
根据实际的Vestas-V82风电机叶片建立叶片仿真模型,叶片模型如图4所示。
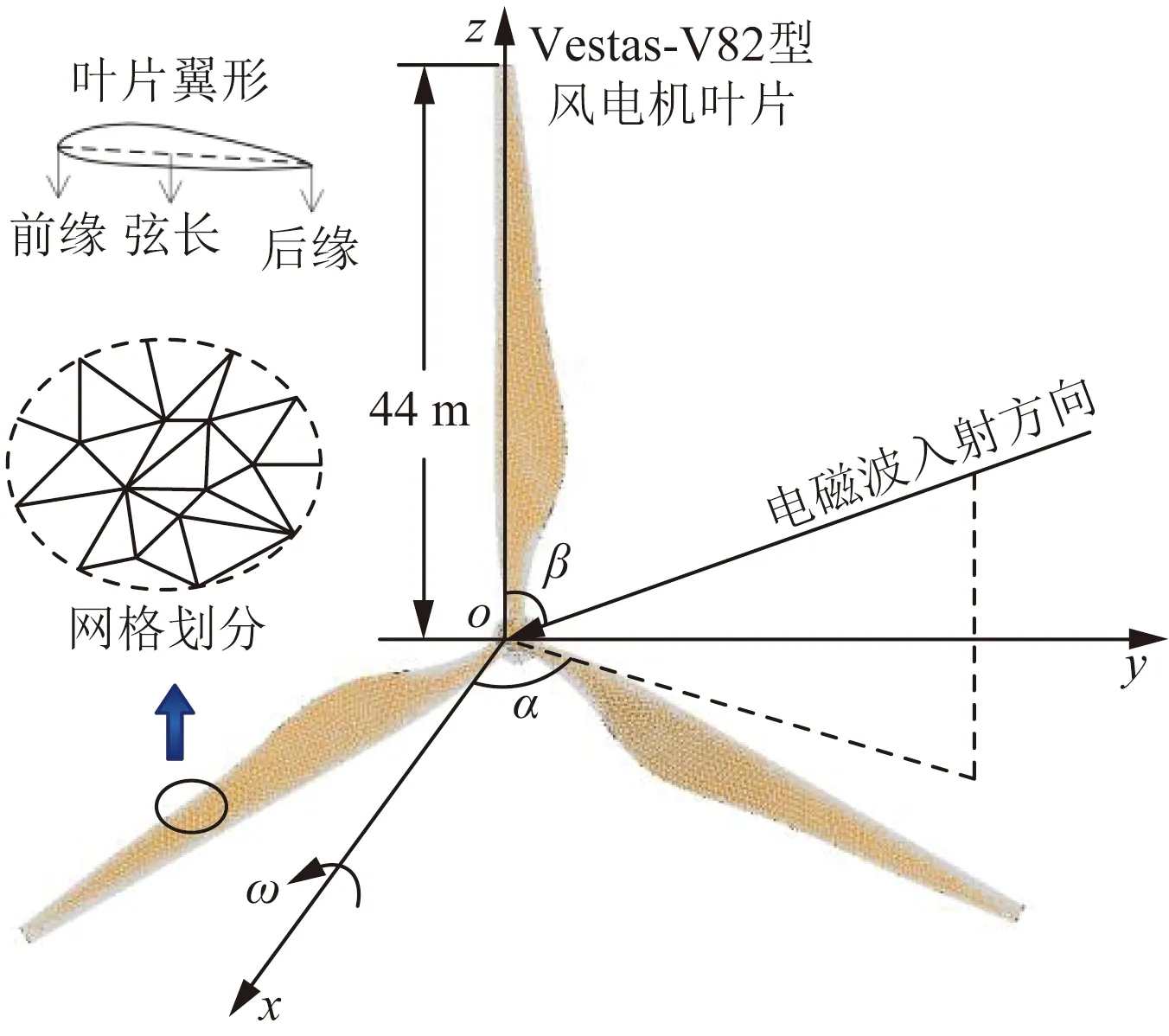
图4 Vestas-V82风电机叶片模型Fig.4 Vestas-V82 wind turbine blade model
叶片长度为44 m,设置叶片转速为ω=10 r/min,雷达发射信号频率为1 GHz,方位角为α为90°,俯仰角β为60°,雷达到风电机中心距离为10 km,叶片初始位置与z轴正方向夹角为0°,脉冲重复频率为1 000 Hz,极化方式采用水平极化方式,仿真时间为6 s。得到地面背景下风电机叶片4条路径回波信号的时域波形和时频域波形分别如图5、图6所示。

图5 四路径回波时域波形Fig.5 Four-path echo time-domain waveform
图6获取的各路径风电机叶片回波时频图主要由“零频带”“正弦包络线”以及“时频闪烁”等微多普勒特征构成。“零频带”是由于风电机叶片轴心处的机舱与雷达没有相对运动引起的。叶片尖端相当于做圆周运动,“正弦包络线”对应的是叶片尖端的回波。当雷达视线与风电机叶片垂直时,风电机叶片被雷达信号完全照射,回波达到峰值,时频域波形便出现“闪烁现象”。当叶片靠近雷达时呈现正的多普勒闪烁,当叶片远离雷达时呈现负的多普勒闪烁。叶片被完全照射,回波达到峰值时,时域波形会出现波峰,所以“多普勒闪烁”出现的时刻与时域波形的波峰出现的时刻相对应。出现正多普勒闪烁时,雷达照射到的是风电机叶片的前缘,前缘结构较厚,回波的能量大。出现负多普勒闪烁时,雷达照射到的是风电机叶片的后缘,后缘结构较薄,回波的能量小,故而正多普勒闪烁的能量高于负多普勒闪烁,风电机叶片的复杂形状则使得时频域波形出现了时频闪烁弯曲这一现象。
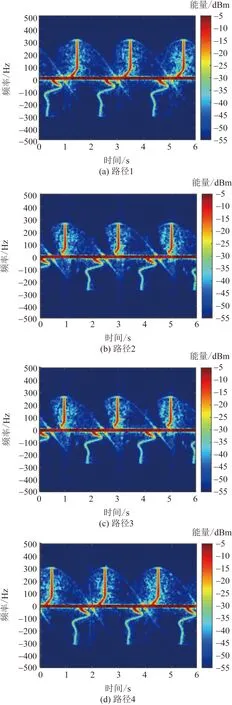
图6 四路径回波时频域波形Fig.6 Four-path echo time-frequency domain waveform
3.2 地面背景下风电机叶片回波模拟
在得到各条路径的回波信号后,将其进行矢量叠加即可得到地面背景下风电机叶片回波信号的时域、时频域波形如图7所示。
根据信号的传播路径可知,路径1对应的回波即为自由空间中风电机叶片的回波。将图7(a)、图7(b)与图5(a)、图6(a)对比可以发现,地面与风电机叶片之间的多径散射对回波信号有较大影响,地面背景下的风电机叶片回波时频图比自由空间中的风电机叶片回波时频图多了两组多普勒闪烁。这是由于自由空间中的风电机叶片回波信号只包含了1条路径的回波信号,地面背景下的风电机叶片回波信号计算了4条路径的回波信号,多出的3条路径是风电机与地面的耦合路径(路径2、路径3与路径4)。但由于路径2与路径3的传播轨迹相同,仅方向相反,其多普勒闪烁产生了重叠现象,故多出的三条路径只多了两组多普勒闪烁。同理,因为路径2 与路径3的信号产生重叠,所以在图6(a)时域波形中其对应信号的幅值大于路径1与路径4对应信号的幅值;在图6(b)所示时频域波形中其对应多普勒闪烁的能量高于路径1和路径4对应的多普勒闪烁。由于各路径传播的距离的不同所以各路径出现闪烁的时刻不同,这与时域波形出现多个波峰相对应,与仿真结果一致。
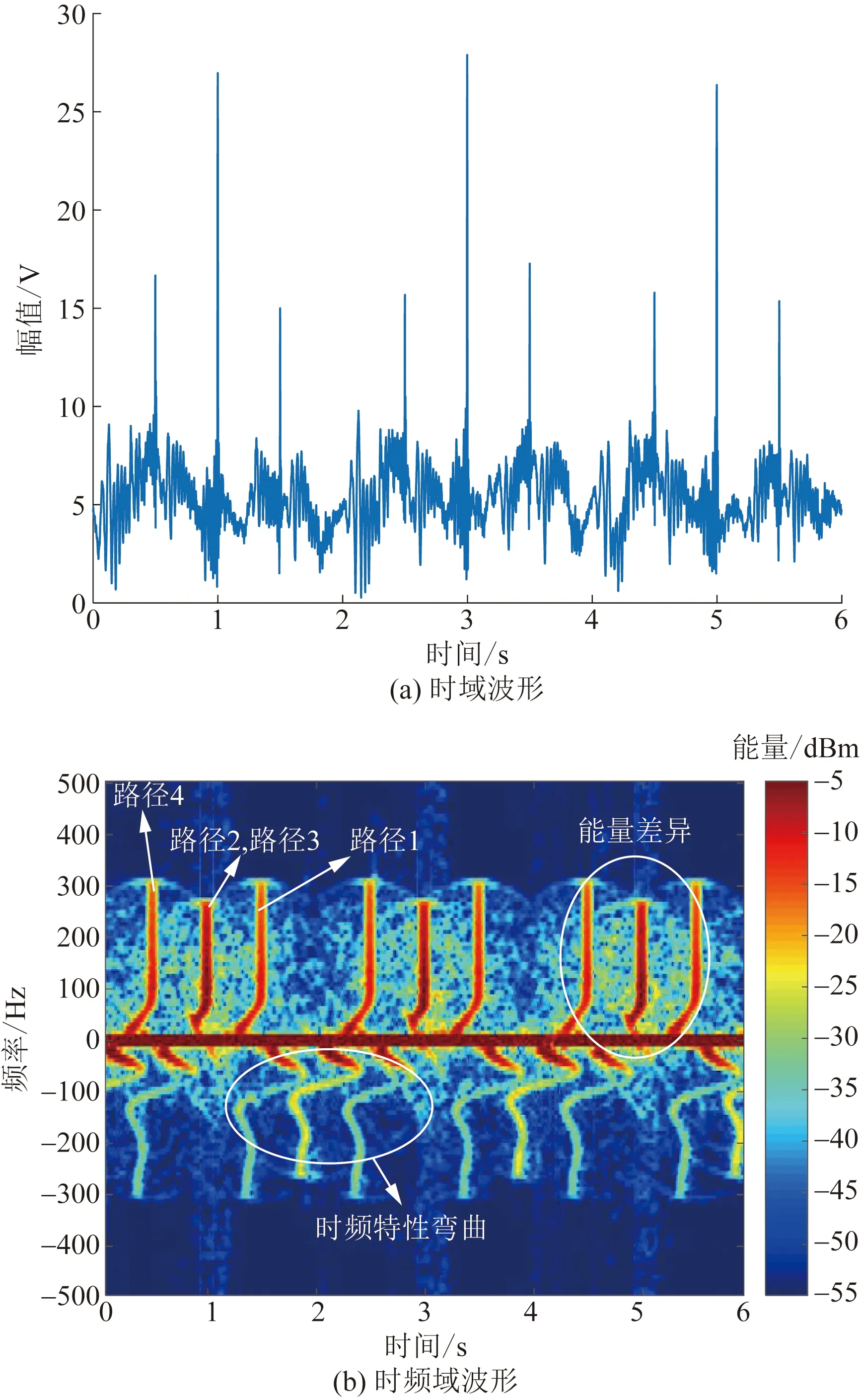
图7 地面背景下风电机叶片回波波形Fig.7 Wind turbine blade echo waveform in the presence of ground
3.3 回波时频图对比分析
为体现本文方法相比于传统方法对的优越性,采用与3.1节相同的风电机叶片模型参数,将传统的散射点积分算法结合路径的方法与本文方法所得结果进行对比。图8为传统方法获得的地面背景下风电机叶片回波时频图。
对比图8和图7(b)可知,因为仿真参数相同,所以正负多普勒频率相同,但由于传统算法为了简化计算,将实际风电机叶片简化成了线模型,所使用的散射点积分算法不能体现出风电机叶片的形状对回波的影响,故回波的时频特性并没有弯曲这一特征。而且传统方法在计算时假设散射点沿着风电机叶片轴线等间距分布且散射系数相同,所以正负多普勒频率没有能量差异,结果较为理想化。而本文方法根据镜像等效原理将地面与风电机叶片之间的耦合路径等效成了风电机叶片在自由空间中的双站散射路径,在计算过程中对风电机叶片整体进行求解,没有对风电机叶片模型进行简化,风电机叶片复杂的外形使得回波的时频域有闪烁弯曲特征并且正负多普勒频率有明显的能量差异,结果与实际更接近。

图8 传统方法获得的地面背景下风电机叶片回波时频图Fig.8 Time-frequency diagram of wind turbine blade echoes obtained by traditional methods in the presence of ground
风电机有成百上千种型号,不同型号的风电机其叶片形状也千差万别,不同型号的风电机对应的雷达回波信号的时频特征也各不相同。因此准确求解出风电机的回波信号,获取其多普勒特征可以准确地判断出风电机的型号,为风电机雷达回波信号的识别与杂波抑制提供参考。
4 结论
为准确模拟出地面背景下风电机叶片回波,提出了一种基于散射电场的地面背景下风电机叶片回波模拟方法,并将结果与传统方法进行对比分析,结果表明本文方法能更准确地模拟出地面背景下风电机叶片回波。为准确获取地面背景下风电机叶片回波的多普勒特征提供了新的方法。
