超大伸缩比机械臂结构设计及其刚度优化方法
2021-12-02车凌云殷辰炜董飞英张嘉宁张小俊
李 峰,邹 堃,车凌云,殷辰炜,董飞英,张嘉宁,张小俊*
(1.上海上电漕泾发电有限公司,上海 201507;2.河北工业大学机械工程学院,天津 300401)
火力发电装机容量早已被公认为世界范围内各类发电方式首位,然而燃煤发电期间必会产生大量干灰,需输入灰库中以待后续处理。干灰长期存储于灰库,积灰粘壁、板结、搭桥等现象显著增多,严重危害火电机组安全运营,故定期清理灰库内壁积灰已成为电厂日常检修重要措施。目前,灰库内壁清理扔采用传统的人工入库方式进行作业,受限于超大作业面积和毒害粉尘环境,作业周期长、效率低、风险高等问题持续存在[1-2]。因此,研发具备全方位清灰特征的灰库清理机器人已成为火电厂长期稳定运营必要措施及国内外学者、工程专家关注焦点。
目前,中外针对灰库清理机器人已进行初步探索,并取得一定进展。如罗宽[3]基于剪叉升降伸缩机构设计的灰库清理机器人初步实现了内壁重点区域局部清理;Dandan等[4]创新利用升降平台将柔性摆锤清灰机构吊装于库顶中心,采用周向回转方式初步实现了内壁的高效清理;曹毅等[5]基于绳索悬臂机构研发的清理机器人虽已具备全域面清理的性能,但仍存在需于库顶中心临时开设安装释放孔的弊端。
然而现有灰库清理机器人仍普遍存在作业区间局限、整机刚度不足、清理精度低等突出问题。为此,现通过设计引入基于绳排的同步伸缩驱动机构,融合轻量化高刚度的多节箱式臂体及柔性周向回转关节,创新设计出一款基于超大伸缩比机械臂的灰库全域面清理机器人。在此基础上,通过深入力学分析建立伸缩臂力学模型并提出刚度条件。利用迭代法对伸缩臂截面参数进行优化,获得不同情况下最优截面参数,并开展相关仿真实验。
1 超大伸缩比机械臂结构设计
灰库通常为立式仓筒,内腔高约16 m,直径约为15 m,用于机器人安装的释放孔普遍位于库顶边缘,直径约500 mm,距内壁近端仅1.3 m,开孔极小且处于严重偏心状态,因此对机器人伸缩性能及整机刚度提出了严苛要求。为此,通过深入研究分析现有灰库清理机器人构型,创新设计出一款基于高刚度超大伸缩比机械臂的灰库全方位清理机器人。
设计的灰库清理机器人整体结构如图1所示,主要由竖直固定臂、水平回转关节、竖直回转关节、水平伸缩臂及其各自末端清理机构构成。
竖直固定臂与库顶辅助释放孔固定连接,水平回转关节与竖直回转关节共同连接于竖直固定臂下方。水平回转关节通过在水平面内回转,配合伸缩臂在水平面内完成周向清理作业。竖直回转关节可实现水平伸缩臂竖直状态与水平状态间精准切换。末端清理机构采用柔性机构支撑滚刷高速回转配合上下往复移动实现高度方向上库壁积灰柔顺接触式清理。
1.1 机械臂动作原理
考虑末端清理装置在水平周向及高度方向上运动均需依靠机械臂大区间伸缩实现,因此对于机械臂的伸缩区间提出了严苛要求。为此,通过设计引入基于绳排的同步伸缩驱动机构,融合轻量化高刚度的多节箱式臂体,提出高刚度超大伸缩比机械臂方案。为保证其各节同步平稳伸缩,各节绳排布置方式均保持一致,故节选如图2所示的部分伸缩臂结构布置方式以简述具体伸缩原理。
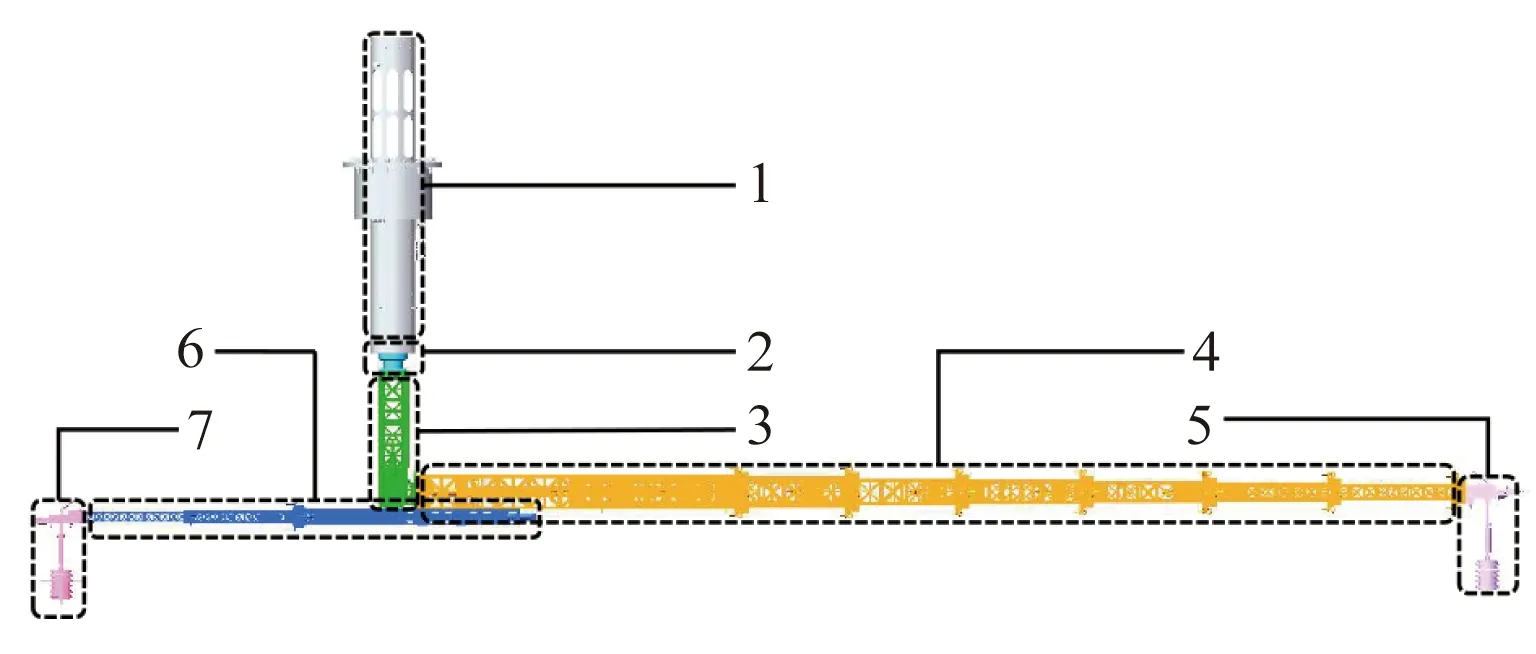
1为竖直固定臂;2为水平回转关节;3为竖直回转关节;4为长伸缩臂;5为长伸缩臂清理机构;6为短伸缩臂;7为短伸缩臂清理机构图1 灰库清理机器人整体结构Fig.1 The whole structure of ash silo cleaning robot
电缸缸筒与缸杆分别与1、2节臂体固定联接,滑轮设置方式如图2所示,当机械臂由近端壁面向远端壁面运动时,电缸缸杆向外推出,缸筒带动2节臂体向外伸出,由于钢丝绳总长不变,故钢丝绳1变长,以致钢丝绳2缩短,3节臂体借助固联在2节臂体上的滑轮伸出,钢丝绳3变长,以致钢丝绳4缩短,4节臂体则借助固联在3节臂体上的滑轮伸出。依次类推,2、3、4节臂体均同步平稳伸出,且伸出长度相同,其余未展示臂体结构依此动作原理全部同步伸出。伸缩臂最短状态时长3.2 m,完全伸出时长13.7 m,伸缩比为3.28,收缩过程与外伸过程反向同理。
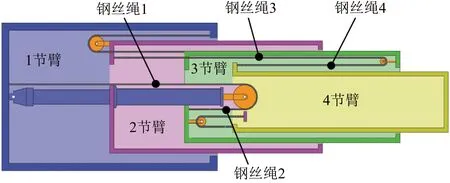
图2 伸缩臂部分结构示意图Fig.2 Schematic of part of the telescopic boom
1.2 驱动力计算分析
鉴于机器人主要依靠伸缩臂搭载末端清理机构进行清理作业,因此通过驱动力计算分析对电缸合理选型是保证伸缩臂完整运动的关键。
伸缩臂由7节箱式臂体嵌套而成,完全伸长可达13.7 m,受重力影响末端位移较大,影响机器人清理精度,因此须于末端添加钢丝绳辅助牵拉保证整体刚度。各节臂之间安装有上下支撑滑块便于轴向往复移动,在驱动力计算分析过程中,应主要考虑轴向荷载,忽略径向荷载,伸缩动作过程中机械臂受力示意图如图3、图4所示(滑块省略)。
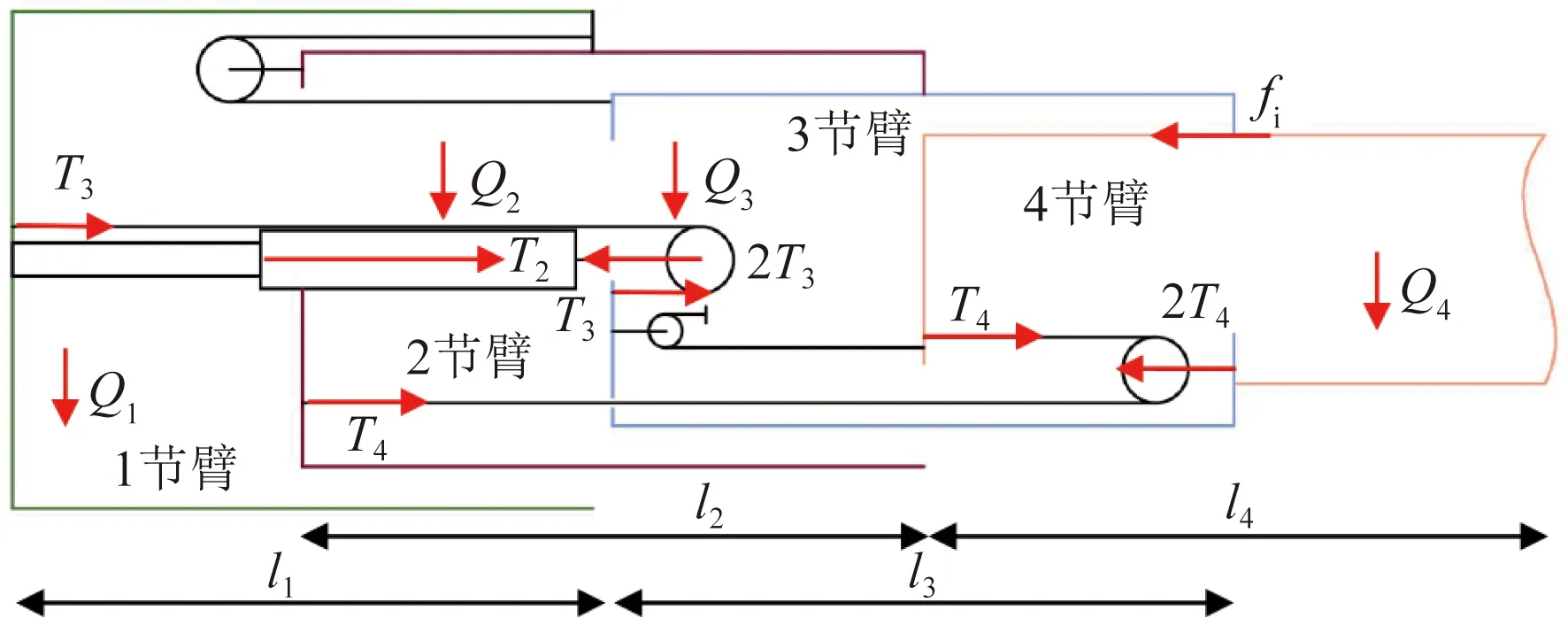
l1~l4分别为1~4节臂的长度;Q1~Q4分别为1~4节臂的自重;T1~T4分别为1~4节臂内钢丝绳拉力;fi为单节臂体伸缩过程中产生的摩擦力图3 第1、2、3、4节臂受力分析图Fig.3 Force analysis diagram of section 1,2,3,4
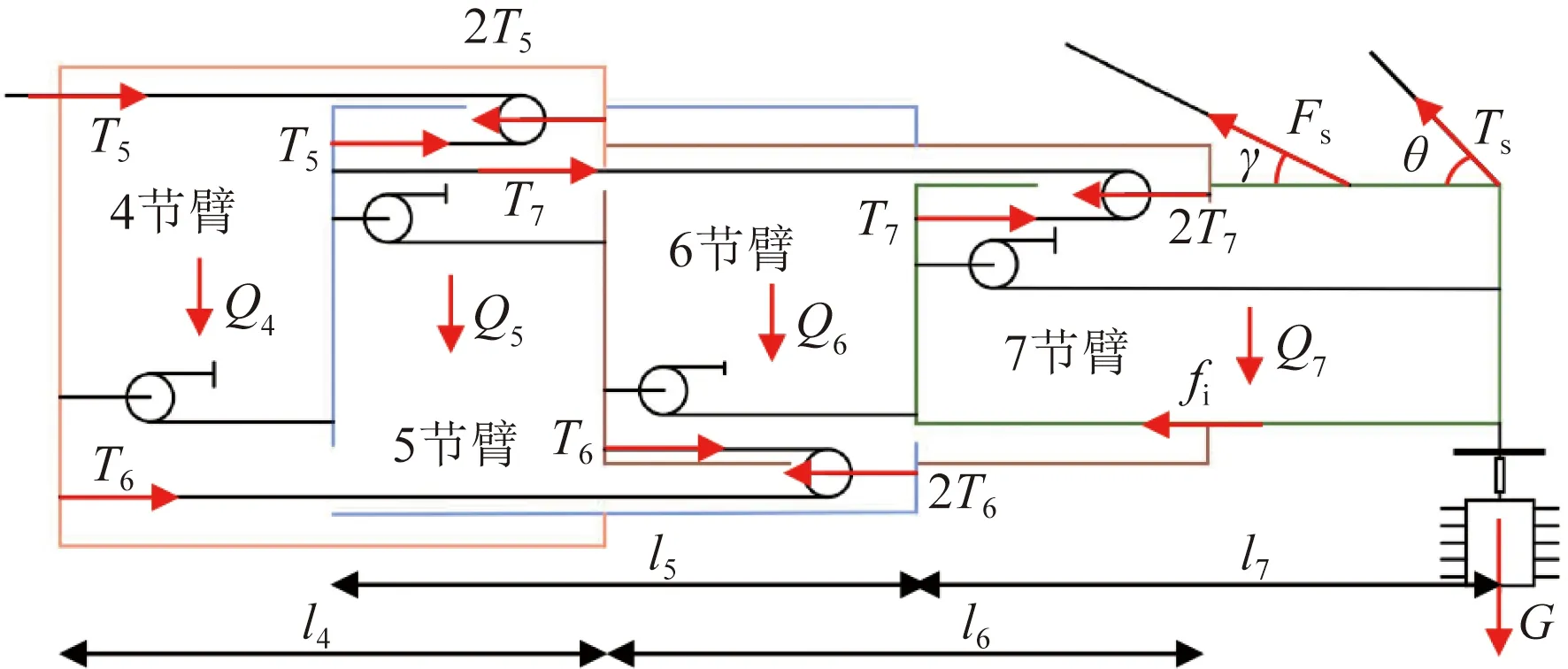
l4~l7分别为4~7节臂的长度;Q4~Q7分别为4~7节臂的自重;T4~T7分别为4~7节臂内钢丝绳拉力;Fs为钢丝绳提供的牵引力;Ts为提升末端清理装置提供的拉力;G为末端清理机构的质量图4 第4、5、6、7节臂受力分析图Fig.4 Force analysis diagram of section 4,5,6,7
各节臂自重的计算公式为
Qi=qili,i=1,2,…,7
(1)
式(1)中:Qi为第i节臂自重,kg;qi为第i节臂自重均布荷载,kg/mm;li为第i节臂长度,mm。
通过对各节臂体单独进行受力分析,可推导出如式(2)所示的各节臂内钢丝绳拉力表达式,即
(2)
式(2)中:Fs为钢丝绳提供的牵引力,N;γ为辅助牵拉钢丝绳与伸缩臂夹角,(°);θ为清理机构线缆与伸缩臂夹角,(°);G为末端清理机构的质量,kg;Ti为第i段钢丝绳牵引力,取向右为正,N;μ为摩擦因数。
通过式(3)可确定驱动力模型为
(3)
至此,通过对机械臂伸缩动作过程中驱动力计算分析,可确定电缸选型范围,继而根据其他参数要求完成电缸选型。在机械臂伸缩整体动作过程中监测电机实时反馈参数,保证整体伸缩动作完整。
2 伸缩臂力学模型与刚度条件
灰库清理机器人采用清理机构在高度方向往复移动与伸缩臂周向回转相结合的作业模式,清理过程中机伸缩臂最长达13.7 m,且需在完全伸长状态下保持一定时间,为保证整机完整且精准作业,伸缩臂整体应具有较高刚度。为此,建立了伸缩臂整体力学模型并给定刚度条件。
2.1 伸缩臂力学模型
伸缩臂在变幅平面内可简化为悬臂梁,对伸缩臂受力分析时,应主要考虑弯矩荷载,忽略轴向荷载。伸缩臂外伸中,臂体间重叠部分逐渐减少,当臂体间由于重叠部分过少存在相互脱离的趋势时,即产生危险截面。本节对伸缩臂的力学分析均基于危险截面开展。为便于计算分析,忽略各节臂体之间自重差,整体自重视作均布载荷q,伸缩臂所受荷载如图5所示。
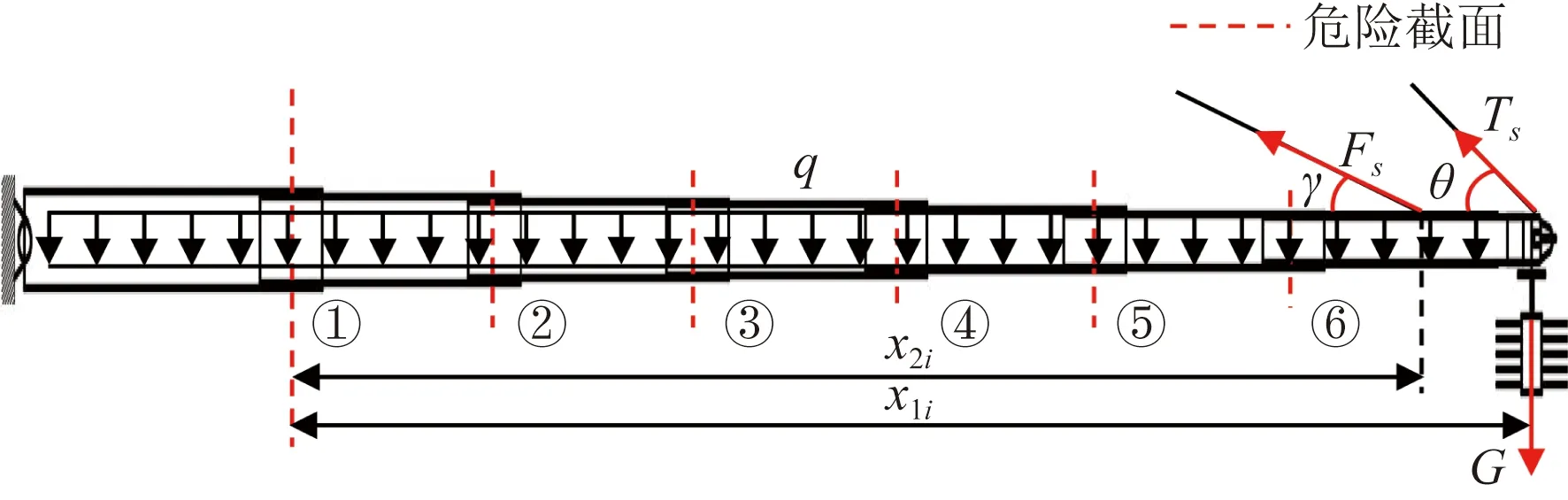
x1i为末端清理机构与计算截面间距;x2i为钢丝绳吊点与计算截面间距;①~⑥为危险截面编号图5 整体受力分析图Fig.5 Overall stress analysis diagram
末端清理机构绳缆拉力S的计算公式为
(4)
式(4)中:φ2为起升动力系数;m为滑轮倍率;η为滑轮效率。
伸缩臂弯矩Mi的计算公式为

i=1,2,…,6
(5)
式(5)中:x1i为末端清理机构与计算截面间距,mm;x2i为钢丝绳吊点与计算截面间距,mm。
基于上述受力分析,可采用非线性迭代方法进行变幅平面内挠度计算,进而搭建力学模型,变幅平面内伸缩臂整体变形示意图如图6所示。
单节挠度及转角如式(6)、式(7)所示。

i=1,2,…,6
(6)
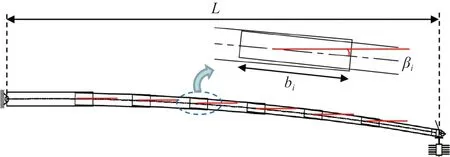
bi为第i节与i+1节臂重叠长度;βi为单节臂体产生的转角;L为伸缩臂总长图6 整体变形示意图Fig.6 Overall deformation schematic diagram
(7)
式中:E为弹性模量,MPa;βi+1为i+1节臂体转角,(°);bi为第i节与i+1节臂重叠长度,mm;Ii为第i节臂惯性矩,mm4。
基于迭代法,变幅平面内臂端总挠度VL为

(8)
2.2 伸缩臂刚度条件
伸缩臂长期处于单向压弯受载状态,可借助迭代法推导基于伸缩臂总长的刚度条件。迭代过程中进行挠度计算,依据结果判断是否进行后续迭代。迭代初始阶段对危险截面赋值,计算出相关力学参数,与初始挠度相比较,若满足设定容差标准且收敛,则输出各力学参数;若不满足,则将此次结果作为新一次的初始值再次迭代,直至满足要求后输出相关参数。此方法计算得到变幅平面内最终的挠度与弯矩可作为伸缩臂刚度校核条件,刚度条件如式(9)所示。

(9)
式(9)中:VaL为变幅平面内许用挠度,mm;L为伸缩臂总长,mm。
至此,通过对伸缩臂整体受力分析,确定伸缩臂为单向压弯杆件。鉴于整体结构的非线性,采用迭代法完成伸缩臂力学模型建立并给出总挠度方程,进而再次采用迭代法给定基于伸缩臂长度的刚度条件。通过给定总长即可确定伸缩臂整体刚度,从而保证机器人整体运行平稳性及末端清理机构的作业高精度。
3 伸缩臂刚度优化
灰库清理机器人作业实质为伸缩臂与回转关节相互配合搭载末端清理机构与壁面实现柔顺接触,其精准高效作业的关键在于伸缩臂提供足够刚度。由于箱式臂体刚度优化受材料、截面形状、镂空等多因素干扰[6],因此伸缩机构整体刚度优化面临巨大挑战。为此,基于控制变量思想,选择优质铝合金作为臂体材料,主要通过优化臂体的截面参数提升伸缩臂刚度。
为了获取最优截面参数方案,选择方形臂架截面上臂体中性截面高度h及臂厚b作为优化参数,以伸缩臂整体刚度作为约束条件,伸缩臂整体重量作为目标函数,箱式臂体截面尺寸如图7所示。
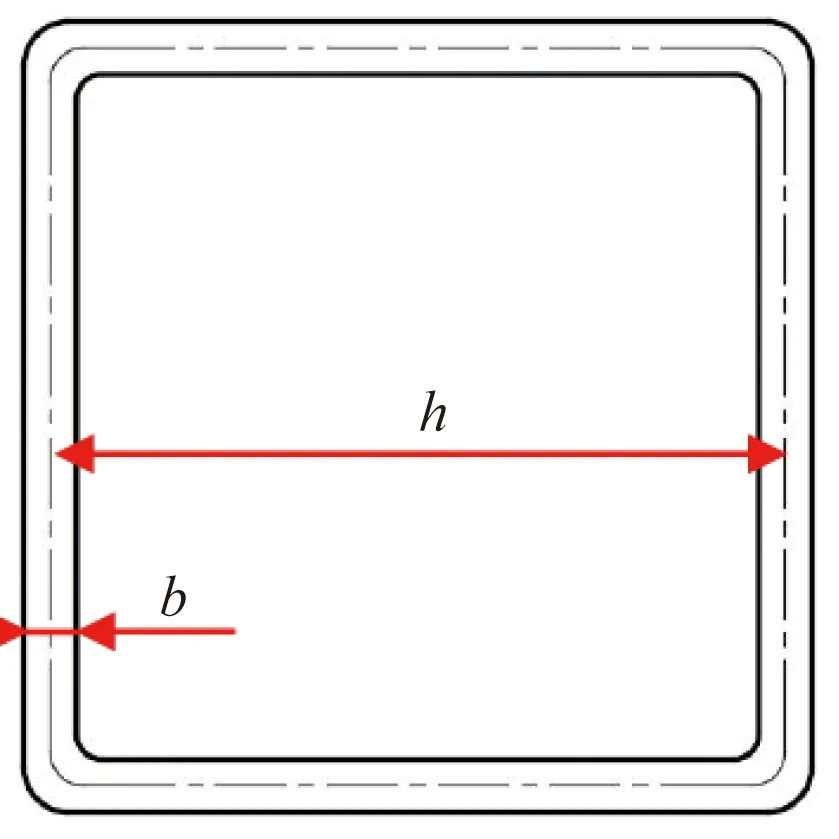
图7 截面尺寸图Fig.7 Sectional dimension diagram
在建立伸缩臂截面优化约束条件时,除了考虑设计变量上、下限约束外,还需考虑应力约束、稳定性约束、挠度约束等静态刚度隐约束[7]。采用先给定一组初始设计序列并对结构进行预分析给出大致范围的方式进行迭代处理。
伸缩臂受载时处于单向压弯状态,基于有限元方法中的空间梁单元组成的总刚度方程如式(10)所示。
Fe=Keδe
(10)
式(10)中:Fe为单元结点力;δe为单元结点位移;Ke为刚度矩阵。
3.1 中性截面高度对伸缩臂力学参数的影响
以中性截面高度h作为设计变量,将臂厚b设置为固定值在力学分析软件中求出最大应力Smax、最大位移Dmax、臂体自重Q及屈曲稳定系数ψ,结果如图8、图9所示,其迭代前后对比见表1。

表1 迭代前后结果对比Table 1 Comparison of results before andafter iteration
由图8及图9可知,随着中性截面高度h不断增加,伸缩臂自重、末端位移及最大应力缓慢增加;中性截面高度h对屈曲稳定系数影响较大,且涨幅在初始阶段最为明显,经历一段时间后涨幅速度相对减缓,但仍保持上升状态。
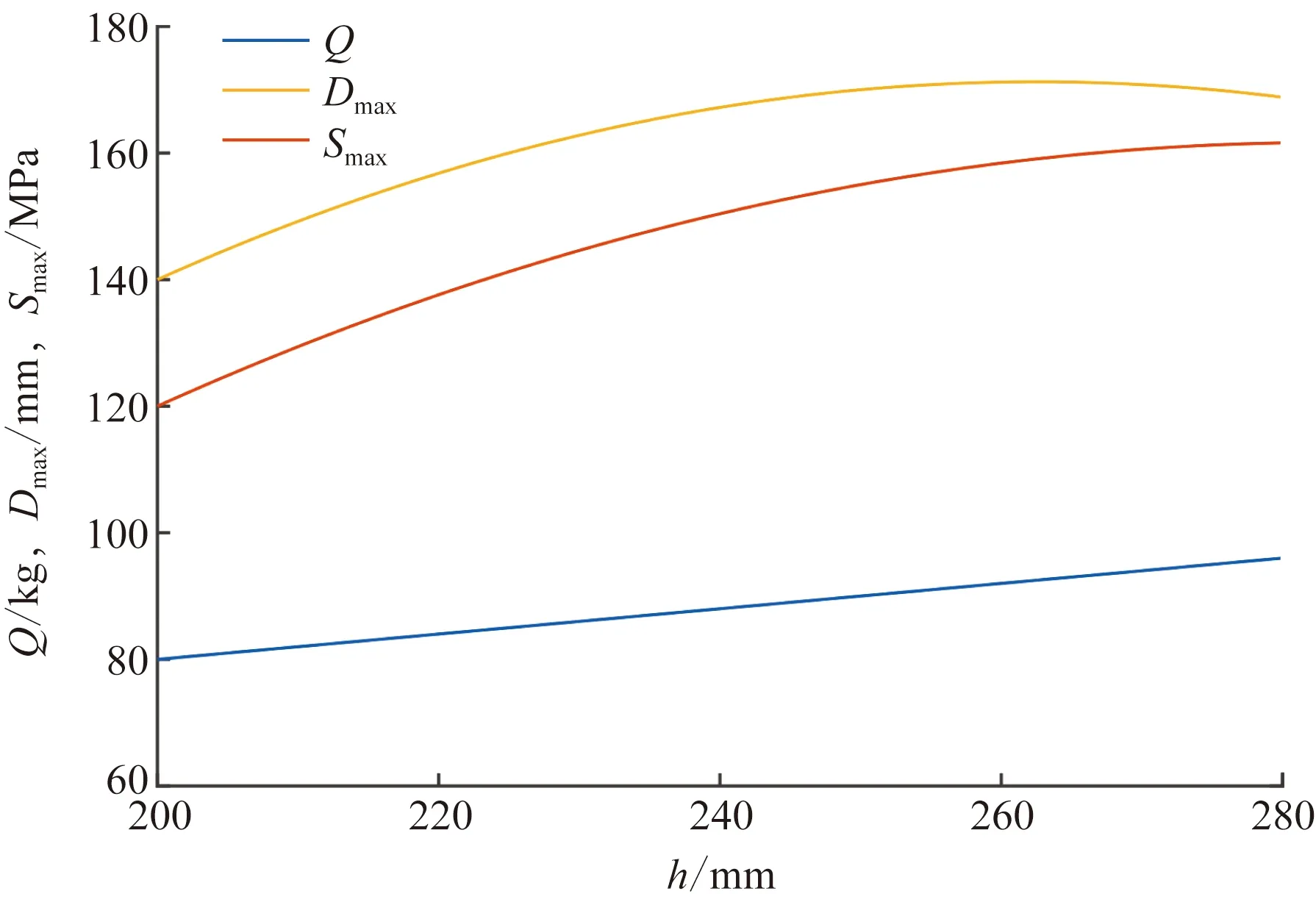
图8 中性截面高度对伸缩臂力学参数(Q、Dmax和Smax)的影响Fig.8 The influence of neutral section height on extendable brachial strength parameters(Q,Dmax and Smax)

图9 中性截面高度对伸缩臂力学参数ψ的影响Fig.9 The influence of neutral section height h on extendable brachial strength parameter ψ
由表1可见,屈曲稳定系数变化率达到831.4%。相较之下,自重、末端位移及屈曲稳定系数变化并不明显,因此中性截面高度在优化截面参数时属于较重要参数。
3.2 臂厚b对伸缩臂力学参数的影响
探究臂壁b对伸缩臂整体刚度影响可参照探究中性截面高度h对伸缩臂整体刚度影响的方法,进行多次迭代,优化前后对比见表2。
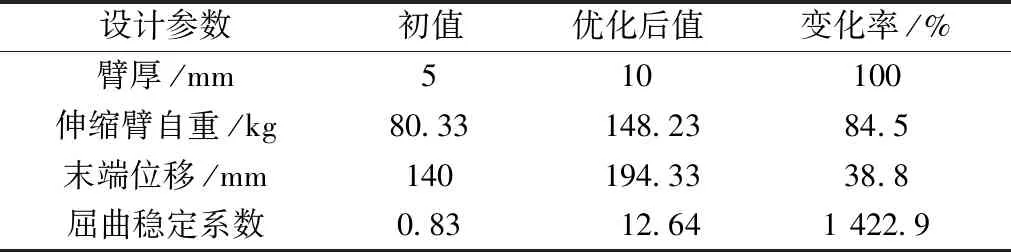
表2 优化前后结果对比Table 2 Comparison of results before and after optimization
由表2可见,屈曲稳定系数变化率达到1 422.9%。自重、末端位移及屈曲稳定系数变化较增加中性截面高度时也有较大涨幅,因此伸缩臂臂厚在优化截面参数时属于次要参数,优化过程中应尽量保证臂厚参数较小以保证整体刚度。
3.3 截面参数综合优化
当中性截面高度h与臂厚b同时进行优化,优化方法依然可参考单参数优化过程,优化后各力学性能极值情况下的截面参数如表3所示。

表3 极值情况下截面参数Table 3 Section parameters in the extremum case
至此,基于截面参数对伸缩臂整体刚度影响深度剖析,利用有限元方法构建空间梁单元总刚度方程式。以截面参数作为自变量,整体重量作为目标函数,将力约束、挠度约束等静态约束作为约束条件,依靠迭代法依次探究中性截面高度h及臂厚b对于伸缩臂力学参数的影响,最终通过截面参数综合优化确定了不同需求下不同的截面参数,实现了有效的截面参数优化。
4 仿真实验
为验证结构设计合理性及伸缩臂整体刚度优化的有效性,设计开展伸缩臂刚度仿真实验[8]。将伸缩臂置于模拟灰库实验环境下,添加重力场,于末端添加模拟钢丝绳辅助牵拉力2 300 N,整体仿真结果如图10、图11所示。
由图10、图11可知,伸缩臂整体变形量最大位置位于末端,偏移量为174.69 mm,伸缩臂整体所受最大等效应力为106.08 MPa,满足伸缩臂整体刚度条件。实验说明伸缩臂结构设计合理,针对截面尺寸参数进行的刚度优化效果显著,伸缩臂在伸长状态下可保证足够刚度,末端清理机构借助伸缩臂与回转关节配合可实现全域面精准高效清理库壁积灰。
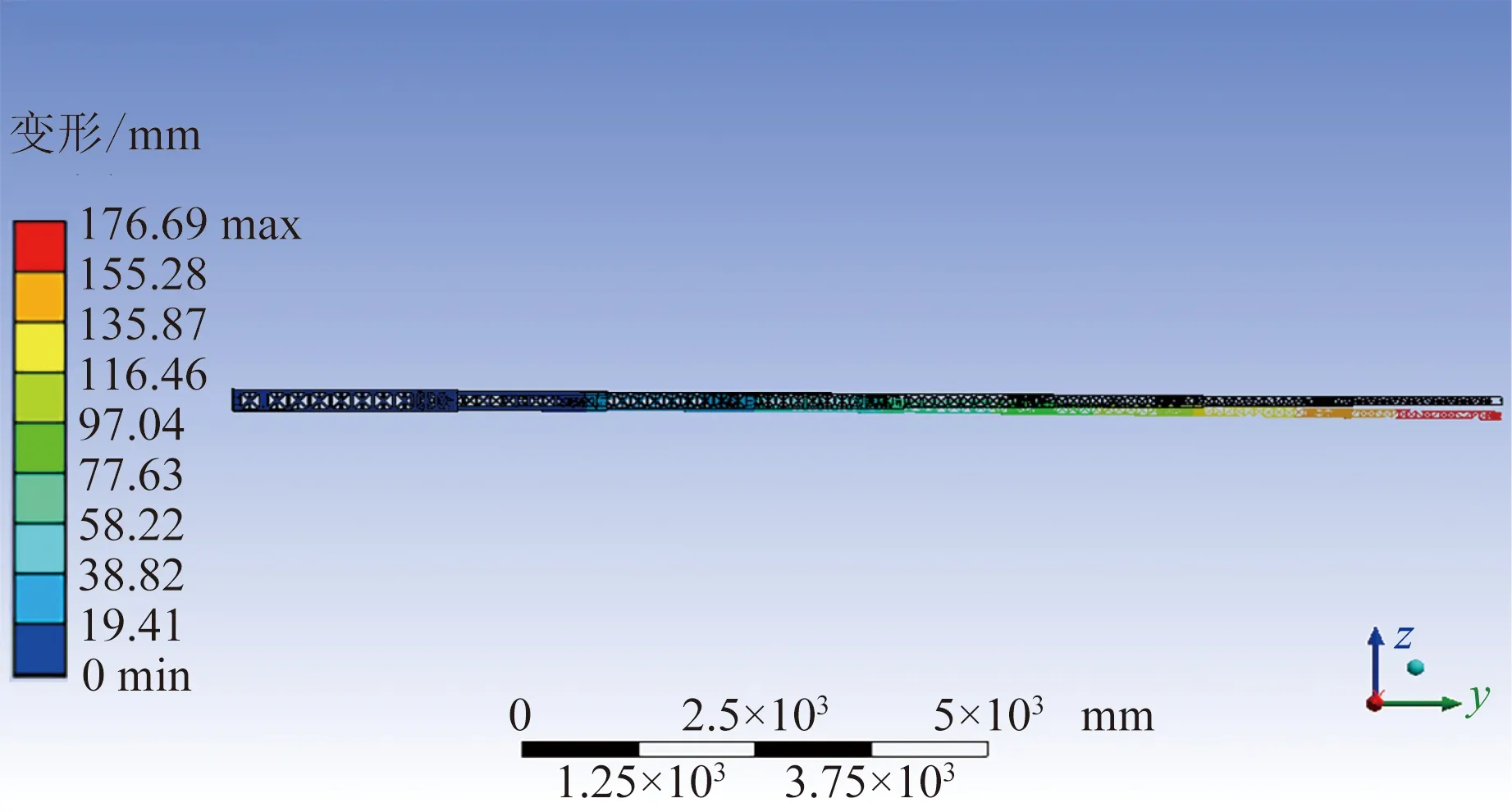
图10 伸缩臂整体变形Fig.10 Telescopic boom overall deformation
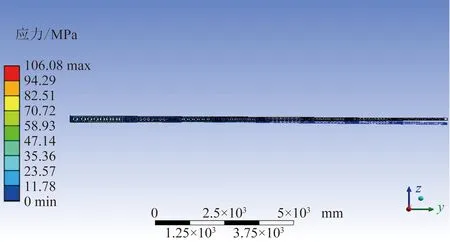
图11 伸缩臂整体所受等效应力Fig.11 Equivalent stress on the whole telescopic boom
5 结论
针对现有灰库清理机器人作业区间局限、刚度不足、效率低下等问题,创新性设计出一款基于高刚度超大伸缩比机械臂的灰库全方位清理机器人。通过融合绳排驱动机构与嵌套箱式臂体结构,提出超大伸缩比机械臂方案,优化设计出灰库全方位清理机器人。基于力学分析,建立了伸缩臂力学模型并给定刚度条件。利用迭代法对伸缩臂截面参数进行优化,得到不同情况下最优截面参数。仿真实验表明经刚度优化后的伸缩臂整体刚度良好,满足灰库清理机器人设计要求。
