美国地下领域无人系统发展现状及启示
2021-12-02李新年李清华王常虹王振桓王振伟
李新年,李清华,王常虹,王振桓,闻 帆,王振伟
(哈尔滨工业大学空间控制与惯性技术研究中心,哈尔滨 150001)
0 引言
地下领域无人系统是指由无人车、无人机以及仿生机器人等单体构成的群体任务执行系统,在没有外界人为干涉的情况下,能够通过单体之间的信息共享与自组织协作,在天然洞穴网络、人造隧道和城市地下环境等典型地下场景执行探索、救援等任务。与传统无人系统相比,地下领域无人系统需要具备在不同地形快速行进、恶劣场景群体协作、遮蔽场景信息交互、复杂环境态势感知、无卫星导航的自主定位等能力。
随着社会的快速发展,人类的生活空间已经不再局限于地面以及天空领域,逐步向地下和太空领域发展,人类对太空领域的探索仍处于初始阶段,太空环境暂且不具备人类生存与发展的条件。与之不同的是,地下领域是人类现在主要的生存活动空间之一,且地下建筑系统已经成为现代化城市的标志性元素之一。地下场景不仅在国民生活中充当着不可或缺的角色,在军事领域同样具有十分重要的现实意义与应用价值。地下场景具有强隐蔽性和强大的防护能力等优点,使其成为美苏冷战期间各国军用核掩体的主要选择,如美国建设的夏延山掩体、白宫地下指挥中心、战略空军司令部,以及苏联的斯大林地堡、北约地下战略指挥中心等,由此可见,地下领域是各国军事系统的重要组成部分。
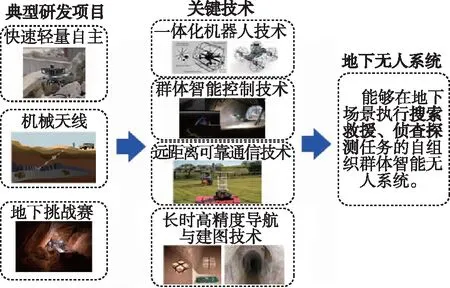
图1 美国地下领域无人系统发展框架Fig.1 The development framework of American underground unmanned systems
美国比我国更早地认识到研究地下领域无人系统的军事意义,尤其是美军在伊拉克战争与阿富汗战争中吃尽了地穴和城市化地道作战等地下战争的苦头,使其意识到对地下机动部队的现实需求,依此可以推断美国是由现实战争需求牵引出对地下领域无人系统的研发[1]。因此,美国早在2016年就开始了地下领域无人系统(图1)的研发,典型的研发项目包括美国国防部高级研究计划局(Defense Advanced Rese-arch Projects Agency,DARPA)提出的快速轻量自主(Fast Lightweight Autonomy,FLA)项目[2-3]、机械天线(A MEchanically Based Antenna,AMEBA)计划[4]和地下挑战赛[5](Subterranean Challenge,SubT)等,旨在突破地下领域一体化机器人关键技术、群体智能控制技术、长时高精度导航与建图技术、远距离可靠通信技术等关键技术,使地下领域无人系统具备自主执行任务、辅助美军搜索、探查恶劣地下场景等能力,在保证美军生命安全的同时高效快速地执行任务。
目前,国内逐渐加深了对发展地下无人系统的认知,但由于起步较晚、军事需求不明确等客观原因的存在,我国与美国在该系统研制方面仍存在一定的差距。本文分析了美国地下领域无人系统的发展现状,梳理并总结了美国地下领域无人系统的发展目标、思路和模式,希望能为国内地下领域无人系统发展需求的确立、发展模式的优化和可持续发展道路的探索等方面提供借鉴。
1 美国地下无人系统发展现状
1.1 典型研发项目简介
美国为加速推进地下无人系统的研发,提出了FLA项目、AMEBA计划和SubT等典型研发项目。下面将通过梳理典型研发项目的应用场景与研究目标,对美国地下领域无人系统的研究进展和下一步发展规划进行分析,梳理、总结美国地下领域无人系统的发展思路和需要解决的关键技术。
1)FLA项目
2016年,DARPA提出了FLA计划,旨在使美陆军在陌生、危险的空间中具备探测搜索隐藏战斗人员或被困人员,以及探索未知环境的能力[6]。FLA的目标是开发一种先进的环境感知和自主导航算法,使得应用此算法的无人机或无人车能够在无外界全球定位系统(Global Positioning System,GPS)辅助及其他任何数据链的引导下,以20m/s(45英里/小时)的速度在不确定环境中自主运行。FLA项目的应用场景如图2所示。

图2 FLA项目应用场景Fig.2 The application scenarios of FLA program
目前,FLA项目已完成2个阶段性目标[7]。其中第一阶段主要测试在真实环境中算法的精度和鲁棒性,测试环境从光照强烈的野外到黑暗的建筑内部,在实现外部环境感知的同时完成自身位置和姿态的估计并避免碰撞各类障碍物。2017年6月,第一阶段目标达成,无人机能够在场景骤变的条件下实现快速的姿态调整、环境感知以及避障,在特征稀缺的低纹理环境中穿越较长距离,迅速完成寻找目标的任务,测试路径如图3(a)所示。2018年7月,FLA实现了第二阶段的测试任务,主要为将小型空中和地面系统转变为能够自主执行对人类有危险任务的编队系统。为了保证顺利完成任务,研究人员在佐治亚州佩里培训基地的模拟城镇搭建了城市室内和室外场景。在图3(b)所示测试场景中,FLA无人机完成了高速飞行中穿越狭窄通道,构建出走廊的三维环境地图,识别出楼梯并沿出口离开大楼。

(a)第一阶段测试路径 (b)第二阶段实验场景 图3 FLA项目野外、室内等实验场景Fig.3 The experimental scenes of FLA project, such as open country, indoor, etc.
2)AMEBA项目
2017年,DARPA针对传统电磁波天线辐射性能受限于天线尺寸、缺乏机动性和灵活性以及在地下领域作用范围严重不足的问题,提出了AMEBA计划[8],旨在开发一种超低频和甚低频范围内的射频发射机,用于地下和水下远距离可靠通信的便携式系统,帮助美军在地下等高遮挡场景具备高穿透性、高可靠性、低功率、长距离且便捷的通信能力。其潜在应用还包括GPS拒止环境下的地面导航系统、检测未爆炸的军械、地下设施和隧道的探测系统,AMEBA项目包含2个技术领域(TA1, TA2)。其中,TA1为射频穿透领域(SLF/ULF, 0.1~1kHz),期望实现海面下100m和地面下600m内的报文发送能力;TA2为射频传播领域(VLF, 10~30kHz), 期望实现地面150km以上的报文发送能力和100km以上的语音通信能力。AMEBA在地下场景的应用如图4所示。

图4 AMEBA在地下场景的应用Fig.4 The underground application scenarios of AMEBA
AMEBA项目研究计划为:
2018年,设计出高性能驻极体和铁电材料,实现磁体和带电材料的大规模、高精度机械驱动;
2019年,设计出小型低频发射器,能够在10m水下或30m地下发送文本消息;
2020年,计划实现水下100m和地下600m文本消息的传输,100km地面距离的语音传输;
2021年,通过优化实现发射器元件的高效机械调制。
3)SubT项目
2018年,为增强美军地下领域作业能力,DARPA针对人工隧道系统、城市地下和洞穴网络等场景举办了地下挑战赛,旨在使无人系统辅助下的美军及其后勤保障人员具备在地形复杂、通信退化、GPS拒止、广阔且未知的恶劣地下场景执行任务所需的技术和能力,以应对突发性人为灾害或自然灾害[9]。
SubT将为活动受限以及特征缺失场景下高精度导航与建图问题提供新型集成解决方案,推进恶劣条件下依然能进行感知的传感器和核心计算单元的研发,促进高机动性机器人技术发展,推动地下场景通信、态势感知和一体化机器人技术的发展,使地下领域无人系统在退化环境中具备分布式信息共享和自主协作能力,达到地下环境中增强人类执行搜救、探查等任务效率,以及确保人员安全的目的。SubT中的人工隧道系统如图5所示。

图5 SubT中的人工隧道系统Fig.5 Artificial tunnel system of SubT
SubT赛程为:
2019年8月,在匹兹堡举办了SubT的隧道巡回赛,举办竞赛的场所为地下煤矿;
2020年2月,SubT的地下城市巡回赛在西雅图以南的萨索普核电站成功举办;
2021年10月,SubT在肯塔基州路易斯维尔的Mega Cavern举办最后一项包含隧道、城市地下和洞穴虚拟与现实综合场景的挑战。
1.2 地下领域无人系统关键技术
通过对美国典型研发项目的分析可知,FLA项目旨在实现对受限任务场景的快速穿越与探查感知;AMEBA项目的研究目标是在高遮挡场景下实现一种便携、低功耗的远距离可靠通信设备;SubT意图开发出一套集感知、导航、群体协作等功能于一体的无人作战系统[10]。可以归纳出美国发展的地下无人系统主要解决:一体化机器人、群体智能控制、长时高精度导航与建图、远距离可靠通信等关键技术。
1)一体化机器人技术
一体化机器人是指具有多种混合运动模式的机器人,采用混合运动模式能够融合不同运动模式的优点,使机器人在机动性能上有较大的提升。美国面向地下领域的机器人技术可以分为基于生物仿生学的一体化机器人技术[11]和基于多模态运动的一体化机器人技术两种[12]。基于仿生学的一体化机器人(图6)技术是指针对特定场景任务需求,模仿在该场景具有生存优势的生物,从而研制出适用此场景的机器人技术。美国针对该技术的代表性研究成果包括ROMAN仿人机器人、NEBULA-SPOT大狗机器人、LEMUR狐猴机器人和DUAXEL仿蜘蛛机器人。基于多模运动的一体化机器人(图7)技术是指能够依据场景自主调整运动模式适应地形的机器人技术,该控制技术能够大幅度提升机器人通过复杂空地场景的能力,降低机器人功耗,并提升其续航能力。代表性研究成果包括ROLLOCOPTER机器人[12]、Hopping Rotochute飞行器[13]、HyTAQ飞行机器人[14]以及组合式一体机器人。

图6 基于生物仿生学的一体化机器人Fig.6 Integrated robot based on biomimicry

图7 基于多模运动的一体化机器人Fig.7 Integrated robot with multi-modality
2)群体智能控制技术
群体智能控制技术是指采用合理的多机器人协调和规划组成的最优机器人系统来执行任务,多机智能控制包括:智能协同编队控制技术、地下空间自主探索技术和地下无人系统协调技术[15]。美国在群体智能控制技术方面做了大量的理论研究,并将部分研究成果成功应用于群体智能系统,在机器人技术、导航及通信技术的协助下实现了地下等恶劣场景的搜索探查[16]。
美国在群体智能控制技术方面处于领先地位,宾夕法尼亚大学的Vijay Kumar提出了编队控制概念,并将设计的编队控制算法应用于机器人编队,引入到美国DARPA的诸多项目中,包括OFFSET和SubT等。编队控制方法主要包括:领航-跟随者法、基于行为法、人工势场法、虚拟结构法和图论法等[17-18]。地下空间自主探索技术方面,科罗拉多大学博尔德分校的Michael T. Ohradzansky等基于生物启发式反应控制和度量拓扑规划,提出了一种简单而可靠的自主探索未知环境的方法,能够实现群体在未知环境下的协同探索。SubT是地下无人系统多机器协调问题中最具有代表性的,各参赛队伍需要协调由无人机、无人车以及机器人等构建的群体对地下空间进行探测、搜救等任务。佐治亚理工学院的CSIRO团队提出了一种基于在线3D边界的无人车和无人机地下环境协调技术,并成功应用于多个机器人探索大型环境的任务[19]。俄勒冈州立大学的Explorer团队基于风险感知图,设计了多机器人协调规划方法,通过定期彼此共享子地图的列表完成信息共享,提高了群体协作执行任务的效率。
3)长时高精度导航与建图技术
地下领域长时高精度导航是指地下无人系统能够根据载体自身的运动、外部环境信息和辅助性电磁信号,在长时间的运动过程中准确获取自身无积累误差的位置信息[19-20]。长时高精度导航技术是实现地下机动部队群体智能控制的基础,也是获取在地下领域执行任务单元状态信息的主要方式之一。地下领域长时高精度导航可以通过低频磁学导航系统和多源传感器融合的自主导航系统[21-22]等方式实现。建图技术是依靠视觉传感器、激光雷达和毫米波雷达等传感器对未知环境进行感知与重构的过程,地下建图技术可以根据参与建图机器的数量分为单机建图与多机建图。
长时高精度导航技术在探查感知地下环境和群体智能协作方面具有不可或缺的作用。导航定位方面,美国早在1979年就开始探索通过低频磁场进行导航的可能性,并于2010年研制出一套类GPS的多磁信标地下导航系统,实现了在地下环境的导航[23];2018年,美国国家航空航天局(National Aeronautics and Space Administration,NASA)与S&T合作开发了一套磁信标导航系统POINTER,该系统具备应用于地下高精度导航的潜质;2019年,由NASA主导的COSTAR参赛团队指出,将集成一种准静态磁场单元到参与SubT挑战赛的无人系统,用于实现无人系统之间的长时高精度导航。美国在地下单机和多机联合建图技术中均取得了一定的研究成果,在单机建图方面,内华达大学提出了一种多相机联合感知的建图方案,实现了黑暗环境下的环境感知;在多机建图方面,NASA的COSTAR团队采用了空中和地面混合平台联合建图的方案,该平台包含多个轮式机器人和一架无人机,能够在极端环境中实现准确建图。
4)远距离可靠通信技术
美国在突破地下环境通信技术上做了很多工作,特别是DARPA提出的AMEBA计划,通过借鉴并改进20世纪50年代对潜低频磁场通信信号实现地下远距离信息传输。远距离可靠通信技术是指在隧道系统、城市地下和洞穴网络等通信能力退化的地下场景中,常规无线电通信信号由于穿透能力不足,无法在高遮挡地下场景实现远距离信息传输,需要利用高穿透能力的低频磁场和自组织多节点通信网络[24]等方式实现可靠的信息交互。
目前,自组织多节点通信网络是解决地下领域无人系统间通信问题的主要方式之一。但地下自组织通信网络存在依赖节点数、无法将信息远距离传输至外界等缺点,导致通信网络适用范围受限,无法从根本上解决地下领域远距离通信问题。
低频磁场通信技术是解决地下通信问题的潜在方案之一,该技术领域需要解决的问题包括降低天线尺寸、质量与功耗,提升网络带宽与信息传输准确率等。美国在该方向的研究内容呈现多层次、多元化特征,包括天线的实现形式、阵列结构、构建天线的材料、低频磁场信号的传播机理、通信信号的调制方案和通信网络构建等方面。美国在该方面也取得了比较显著的阶段性研究成果。伊利诺伊大学厄巴纳-香槟分校的机械天线工程师团队围绕动力学与微制造、精加工、电磁学和信号调制等方面开展了超高效的机械低频磁场发射系统的研制,研究人员表示,该实现形式的天线低频磁场辐射能力可能是电子天线的数千到数百万倍;美国国家加速器实验室(Stanford Linear Accelerator Center, SLAC)利用铌酸锂晶体设计了一种新型机械天线[25](图8),通过在棒状晶体杆上施加振荡电压,促使晶体振动、交替收缩和膨胀产生振荡电流,辐射出超低频磁场,仅依靠4英寸高的天线便能实现30m的信息传输,辐射效率比传统的紧凑型天线高300倍,并设计了一种调整发射辐射波长的方法,通过反复切换磁场频率使传输数据的带宽扩大近100倍,实现了每秒超过100位的信息传输速率;加利福尼亚大学设计了一种磁摆阵列便携式机电通信装置,可以实现比传统线圈更高的品质因数,显著提升磁场信号的传输效率,实验结果表明,该磁摆阵列以谐振频率工作时,磁场信号能够提升6.55dB[26];密歇根大学研究了机械天线辐射功率与旋转频率、偶极矩、所需机械力和旋转半径之间的关系,在理论上分析了磁介质共振能够提升机械天线磁场约100dB[27]。
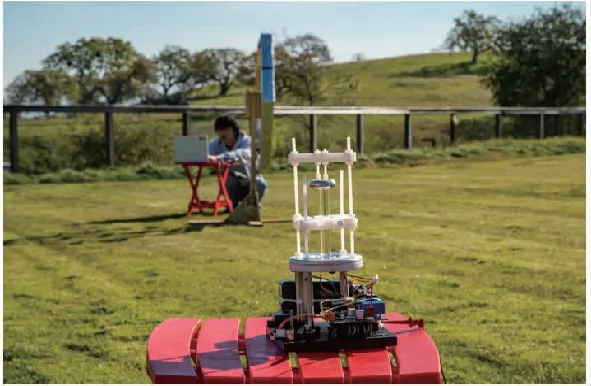
图8 LiNbO3机械天线发射器Fig.8 Lithium niobate mechanical antenna transmitter
2 美国地下无人系统发展趋势
美国地下领域无人系统技术初始阶段的探索研究已经接近尾声,目前已初具规模,而地下领域无人系统实际面向的应用场景复杂多变,自然和人为影响因素将使其更加多样化。因此,美国地下领域无人系统技术将进一步深化发展,成为能够应用于强对抗环境下的技术储备。
结合对美国地下无人系统发展现状的研究分析,可以归纳出美国主要从突破关键技术瓶颈、整合系统有效资源、实现基本功能等方面开展无人系统探索研究。美国地下领域无人系统仍处于特定场景的实验室研究阶段,为满足真实任务场景的需求,美国将从增强单体性能、提升群体协作能力等方面优化地下领域无人系统,满足强对抗场景下无人系统的应用,进一步加强系统自适应进化能力,推动地下领域无人系统在实际任务场景中的应用。
2.1 增强无人系统单体性能
地下领域无人系统的实际应用场景与需要面向的突发情况会比测试阶段搭建的场景更加恶劣,时空受限更加严重,无法发挥无人系统整体的群体协作能力。因此,美国将从增强单体性能方面提升无人系统的任务执行能力,同时单体性能的增强也会使无人系统整体的性能得到提升。
目前,美国地下无人系统单体仍存在对特殊情况的适应性不好、自主能力不强、对任务目标的识别依赖特殊标识、载体功耗大续航能力不强、抗干扰能力不佳、导航精度不够、通信距离不足等多种缺陷,需要针对性地通过精加工、芯片技术、人工智能、信息物理系统等技术,改进单体机械结构、提高控制与传感器系统的集成度、提高传感器感知能力、加深传感器之间的融合程度、优化电源管理系统、加强无人系统对任务目标的辨识能力,从而实现无人系统单体性能的增强。
2.2 提升无人系统群体协作性能
地下领域无人系统主要解决的是群体协作问题,将无人机和无人车等组成的异构群体联合起来执行感知、探索搜救等任务。目前,美国已经在人工隧道系统、城市地下和洞穴网络等特定场景实现了基础功能,而面向实际应用的地下无人系统还需要具备自主解决任何突发性状况的能力。
提升群体协作性能是增强地下领域无人系统整体任务执行能力的必要手段,使整体无人系统能够适应不同任务场景的需求。提升无人系统群体性能需要优化群体智能控制策略、信息共享机制及任务执行单元布局;增强整体系统的鲁棒性,即在部分单体失联或失效的情况下,系统具备自适应规划完成整体任务的能力;建立代价准则,使无人系统整体在信息共享机制下,基于信息判断具有主动舍弃一些功能来谋求整体更大性能的能力,达到以最小的代价获取最优任务执行度的效果,从而提升地下领域无人系统的整体性能。
3 对我国地下领域无人系统发展启示
针对地下领域无人系统技术的研究,美国处于领先地位,其在理论架构以及工程样机研制方面均取得了阶段性成果。基于此可以分析出,美国在地下领域无人系统方面已经完成技术储备与布局,并逐步将无人系统向军事应用方面推进。通过分析其研究现状、发展路线及研究目标过程可以得到如下三方面启示与建议。
3.1 明确地下领域无人系统发展需求
结合美国军事情况可以看出,美国是由现实战争需求牵引地下领域无人系统研制,符合现实军事需求推动科学技术进步的发展模式,具有明确的军事需求;而我国在很长的时间内处于和平时期,难以从实战中提炼出明确的军事需求,因此需要借鉴美国地下无人系统发展目标,分析其地下领域无人系统的潜在应用场景,明确国内地下领域无人系统需要具备的功能及其性能指标。
梳理国内地下领域无人系统发展需求,需要结合我国国情、地理条件、科技发展现状等多方面现实情况和因素进行综合考虑。目前,国内正处于经济高速发展的和平时期,地下领域无人系统技术的发展需求主要体现在民用领域,井下作业和煤矿采集等地下资源获取以及突发情况的抢险救援方面,应用需求明显。例如,低频磁场通信技术不仅在军事领域具有重要的研究价值,其研究成果对解决突发性灾害的救援问题同样具有十分重要的现实意义。2021年1月,山东栖霞五彩龙金矿爆燃事故中,抢险救援的一个难点就是与地下被困人员的信息交互,只能依靠有线通信手段与被困人员进行沟通并开展救援。高穿透性的低频磁场通信技术能够快速有效解决地面救援人员与深埋矿井或洞穴中作业人员的无线通信问题,使救援人员能够快速开展救援任务,提高救援效率,保证被困人员的生命安全;在楼宇火灾救援方面,长时高精度导航与建图技术能够协助消防员在充满浓烟的狭窄恶劣场景中进行路径规划,使消防员在完成救援任务后,能够以最快的速度从安全通道撤离,有力地保证了消防员执行救援任务的成功率与安全性。
因此,建议优先围绕搜索、救援等方面开展地下无人系统技术的研究,取得阶段性研究成果后再逐步深化发展,提升系统性能指标。立足国内军事与民用两方面发展需求,从技术理论和系统开发等多个角度,层次分明地确立国内地下领域无人系统技术发展的阶段性目标和终极目标。
3.2 优化地下领域无人系统技术发展模式
在推动地下领域无人系统的研究方面,美国采用军民融合和举办国际竞赛两种形式,充分利用了国内外研发力量,达到低成本、多技术路线成果储备的目的,并逐步将技术储备向军事装备转化。
地下领域无人系统的发展是一种融合材料、控制、机器人、微电子、仿生学、计算机、机械加工、导航、通信以及人工智能等多学科交叉融合的一项工程问题,迫切需要多学科专业人员齐心协力完成地下领域无人系统的技术攻关。
国内地下领域无人系统技术的研究尚处于探索阶段,为促进国内在该领域的发展,建议结合国内科技发展情况,整合国内外优良资源,以科研院所为主导联合高校、民企等多元科研力量,形成具有我国国防工业发展特色的地下领域无人系统发展模式,准确对接军事需求,补齐国内在该领域的技术储备短板。
3.3 提高地下领域无人系统发展可持续性
随着科学技术的发展与人类对高质量生活的追求,地下空间很可能发展成为人类生存活动的另一主要空间,并衍生出多类无规律地下活动场景,因此国内地下领域无人系统应符合可持续发展原则。地下领域无人系统的研究需要在兼容现有技术的基础上,为下一代地下无人系统留出发展空间。在地下领域无人系统设计过程中,应考虑各类传感器接口的规范一致、机械结构的可替代性,以及对不同场景的适用性,从而提高地下领域无人系统在不同条件下执行任务的能力。
4 总结
由无人车、无人机以及仿生机器人等构建的地下领域无人系统,具备快速行进、群体协作、信息交互、态势感知与自主导航等能力,能够在天然洞穴网络、人造隧道和城市地下环境等恶劣场景执行探索、搜救等任务。美国地下领域无人系统技术初始阶段的探索研究成果表明,该技术能够显著增强人类在地下场景执行任务的能力,将引发新一代地下战争模式的颠覆性变革。为此,本文梳理了DARPA典型研发项目,提炼出地下领域无人系统需要突破的关键技术,归纳总结了该领域的发展趋势,并结合国内发展情况提出了地下领域无人系统的发展启示与建议,以加快国内地下领域无人系统技术的研究。
