基于改进PID控制光电探测系统能耗优化方法研究
2021-11-29曲世敏
曲世敏
(吉林大学 电子科学与工程学院,吉林 长春 130012)
光电检测系统的运行原理是,在辐射情况下,通过改变材料的电导率,实现检测光电信号功能。光电检测系统采用高阻多晶材料作为连续薄膜靶表面材料,用来降低光生载流子扩散对检测结果造成的影响[1]。光电子检测系统在运行过程中消耗大量能源,而其所处的应用环境又不能提供足够的能量,因此需要对光电子检测系统进行能耗优化。能耗是反映国家节能技术水平的重要指标之一。从国内外相关研究文献来看,目前发展较为成熟的节能优化方法有:基于机器学习特征的节能优化方法、基于大数据分析的节能优化方法和基于云存储内容的节能优化方法。由于传统的能耗优化方法控制效果不明显,能耗较大,故引入改进的PID控制技术[2-4]。改进后的PID控制技术依赖于相应的控制器设备实现,控制器中各个单元的作用分别为提高控制性能、提高系统的运行速度并降低误差。改进后的PID控制技术性能明显提升,将其应用于光电探测系统能量消耗的优化控制中,可以进一步提高能量消耗的控制效果,对光电探测系统有一定的研究意义。
1 光电探测系统能耗优化
1.1 建立光电探测系统的数学模型
光电探测系统利用光子效应进行探测。由于价带中电子的丢失,在运行过程中可能会出现光电空穴电子对。光电探测系统的工作原理如图1所示。
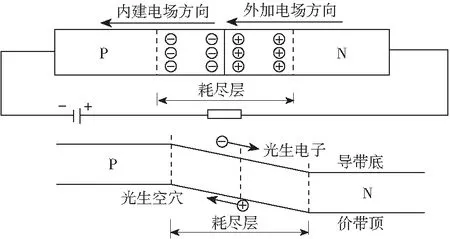
图1 光电探测系统工作原理
当向P、N两端施加反偏电压时,光电探测系统中会产生相应的电压,并且根据其中的电子空穴对分析电场[5]。由于探测目标区域厚度逐渐增加,有效吸收区域内漂移电流和扩散电流的比值随之升高。光检测系统中存在的光子效应波长可以通过式(1)进行计算:
(1)
式中,Eφ为光子的能量比发射体的功函数,由此可以计算出光电探测设备吸收光子能量后,光电入射光波的最终波长λc的最终取值结果。
1.2 安装改进PID控制器
传统的PID调节控制器由于光电探测系统控制范围较大,不能满足其要求,融合模糊控制与传统PID控制2种方式,设计安装了改进后的PID控制器[6-8]。改进后的PID控制器框架如图2所示。
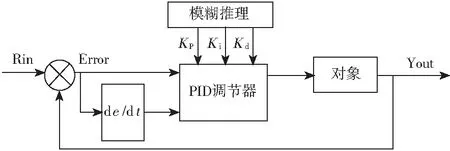
图2 改进PID控制器结构
改进PID控制器的一般形式:
(2)
式中,e(t)为系统误差;Kp、Ki与Kd分别为系统误差、积分、微分信号的加权系数。
由此计算出系统控制信号,实现对被控对象的驱动[9]。在应用过程中,改进PID控制器,将控制信号的传递函数为为:
(3)
式中,Ti和Td均为控制过程时间常数。在改进PID控制器设计合理的情况下,逐渐降低控制误差,达到系统的控制要求。
1.3 计算光电探测系统能量消耗
根据光电探测系统的工作原理,可将其能耗划分为直接相关能耗和间接相关能耗,具体包括检测能耗、光电信号转换能耗、温度控制能耗等方面[10]。光探测仪消耗的主要是电能,通过计算电流,可以统计光探测仪的能量消耗。光电探测系统消耗表面漏电、复合、隧穿和欧姆4种类型的电流,由于检测器表面物理特性而产生的缺陷,其表达式为:
(4)
式中,A和q分别为截面和电子产生量;S0为电流表面复合速度,其计算公式为:
S0=σnvthNst
(5)
式中,σn为电子表面俘获截面;vth为载流子速率;Nst为表面区域内单位面积的复合中心浓度。光电检测系统所消耗电流的表达式为:
(6)
式中,τgr为载流子有效寿命;k为常数系数;V为反向偏压的大小;E为光探测耗尽区域的电场;Reff为光电探测系统的有效电阻[11-13]。另外变量θ1、θ2可以用式(7)进行计算:
(7)
式中,mc为电子有效质量;ξ为与隧穿势垒形状有关的参数[14]。
根据上述计算结果,可以得出光电探测系统的能量总消耗为:
(8)
式中,U为光电探测系统在工作状态下的额定电压;Pele为消耗电力的功率;PTx为光信号发送消耗的功率;PRc为接收端环路消耗的功率;Ttotal为完成一次光电探测所需时间。
1.4 实现光电探测系统能耗控制与优化
根据光电探测系统的能耗计算结果,采用按需改进PID控制器的方式,实现光电探测系统的能耗优化控制。控制器必须先进行整定,然后再进行控制。通过比较系统实际输出特性和预期输出特性之间的差异,求解能耗控制规则和修正量。所设计的参数自动调节改进PID控制器,通过测量光电检测系统硬件温度,并将检测到的温度结果与设定温度值比较,获得温差和温差变化率,在线调整量化因子,对控制规律进行修正[15]。通过增加系统输出功率,在控制器的驱动控制下节约了能耗。为了提高光电探测系统的能源利用效率,需要调整系统的作用状态,保证系统的实际运行效率在最佳效率附近浮动。具体的控制过程如图3所示。
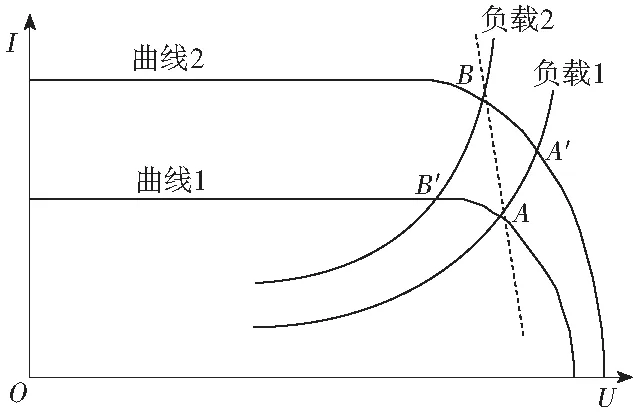
图3 光电探测系统最大功率控制过程
图3中的2条曲线分布反映了系统在2种不同环境下的输出特性。其中,A点和B点分布为系统的最大功率点,同时假设系统在某一时刻保持在A点。外部环境变化时,曲线由曲线1变为曲线2,此时负载1保持不变,系统的运行状态也会在A′点发生相应的变化。因此,系统的输出特性与所要求的最大功率点存在偏差。当系统的负荷特性也随之作出相应的调整,由负载1变为负载2,就可以更好地跟踪最大功率,从而使系统的最大功率变为负荷B[16-20]。同样地,如果外部环境的变化使输出特性从曲线2下降到曲线1,那么系统的运行状态就会从B点变化到点B′,那么负载曲线就应该相应地进行调整,以保证最大功率持续运行。最后在改进后的PID控制器下,通过约束系统最大功率,实现了光电探测系统的能量消耗优化。
2 性能测试实验分析
以测试设计的基于改进PID控制光电探测系统能耗优化方法的能耗控制效果为目的,设计性能测试实验,实验采用多次操作取平均值的方式,保证实验结果的置信度。
2.1 配置实验环境
以VC+6.0为开发工具,进行基于改进的PID控制的光电探测系统能耗优化方法的开发,利用开发工具可以创建程序运行的源文件,方便对各个项目元素的统一管理,使用工作区窗口可以直接查看和访问项目中的各个元素。除基础试验环外,为了确保光电探测系统和能耗统计软件的稳定运行,还需要在试验环境中安装无线通信网和主测试计算机设备,使之能得到量化的、可比较的试验结果。
2.2 选择光电探测系统研究样本
按照探测原理可以将光电探测系统分为光子探测系统和热探测系统2种类型,此次性能测试实验中选择光子探测系统作为研究样本对象,系统结构如图4所示。在正常运行时,该系统中的振动晶格可以不断地为电子提供能量,产生自由载流子,实现对光电探测系统的持续供能。
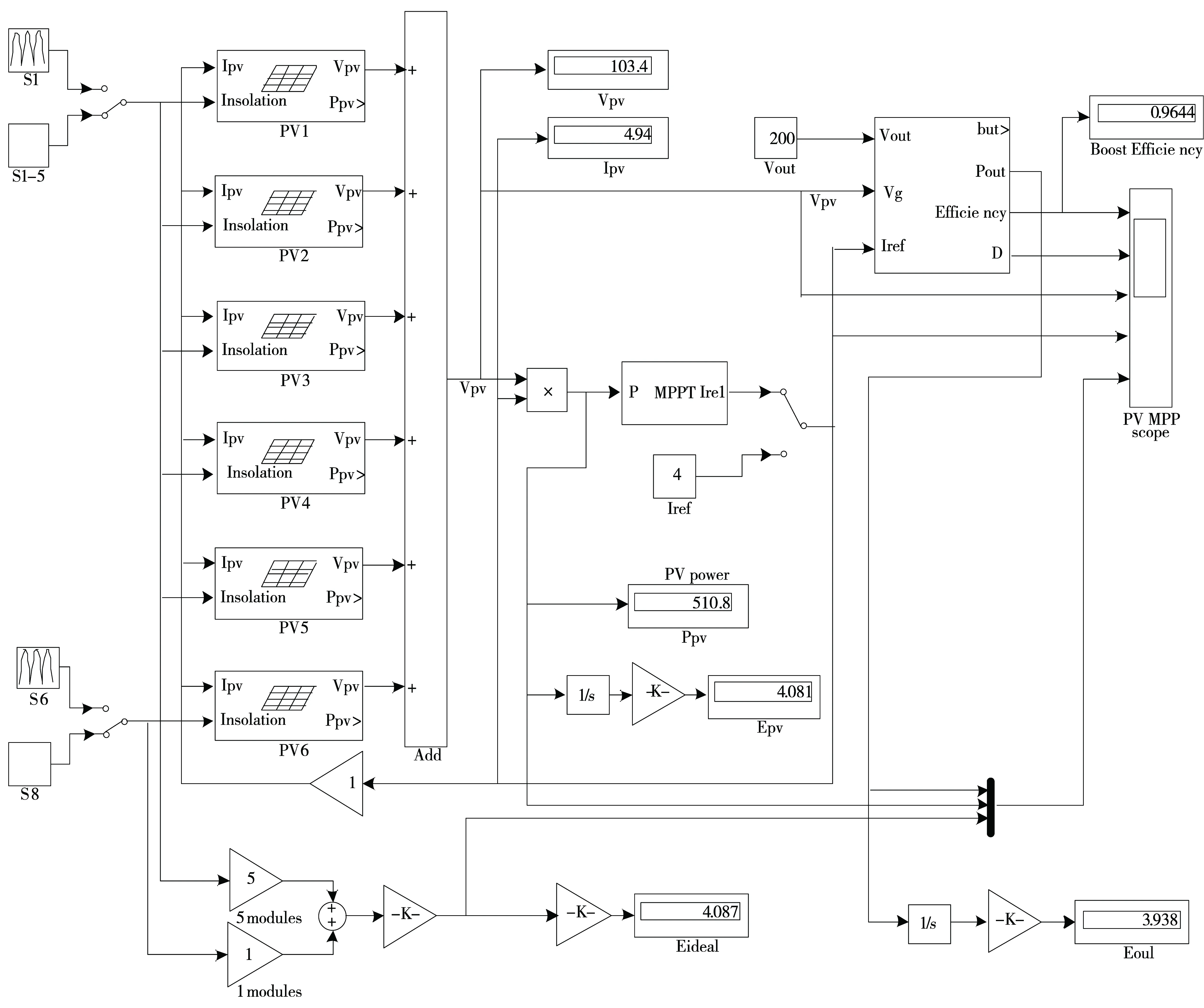
图4 光电探测系统
2.3 改进PID控制器安装与调试
光电探测系统能耗优化设计方法采用改进的PID控制技术,需要将控制技术的运行环境配置到实验环境中,即将设计好的改进PID控制器安装在实验环境中。利用MATLAB中的逻辑工具箱,对操作命令进行设计。以光电探测系统的输出功率到达给定范围的速度为依据,设置控制规则,如图5所示。最后,准确定义与系统中每个变量关联的隶属函数的形状,得出改进PID控制界面如图6所示。
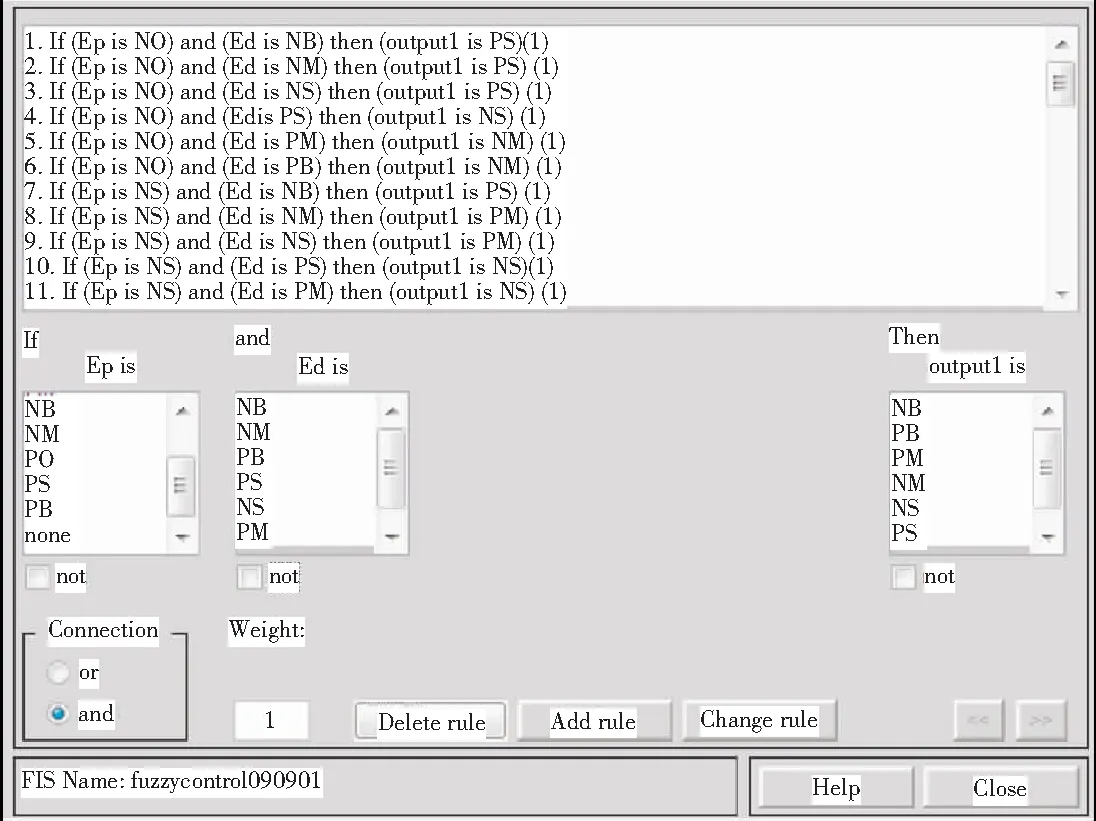
图5 改进PID控制器的模糊规则
2.4 设置性能测试指标
性能测试实验的主要目的是证明优化方法应用前后,光电探测系统的能量消耗情况,因此设置性能测试指标为实际能耗量,该指标以输出功率的方式得出。光电探测系统能耗优化的前提是不能影响系统功能的正常运行,因此还需要设置系统的响应速度作为验证系统运行正常的指标。光电探测器的响应速度可以通过探测信号的浮动时间进行确定。
2.5 性能测试过程与结果分析
为了体现设计优化方法的能耗控制优势,实验还设置了2种对比优化方法,分别为基于机器学习特征的优化方法和基于大数据分析的优化方法。3种能耗优化方法以并行的方式运行,且2种对比方法无法调用实验环境中安装的改进PID控制器装置。在实验环境中设置多个光电检测任务,并得出能耗统计结果见表1。
从表1中可以直观地看出,在3种不同能耗优化方法下,光电探测系统实际能耗的平均值分别为115.5、96.5和85.9 kW。经过能耗优化方法应用后,光电探测系统响应时间的统计结果见表2。通过对表2中数据的处理与统计,在3种能耗优化方法控制下,光电探测系统的平均响应时间分别为2.84、2.13和1.19 s。综上所述,在光电探测系统中应用改进PID控制技术进行能耗优化,可以在保证系统运行功能的情况下,有效地降低系统的实际能源消耗。
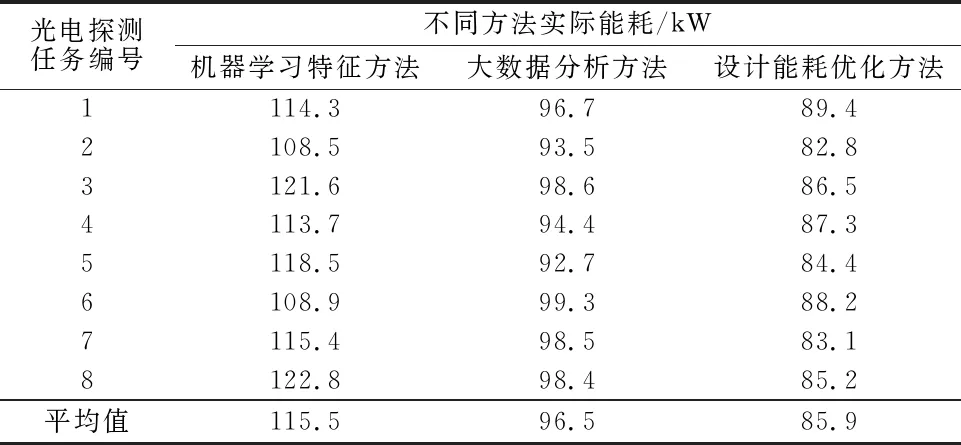
表1 实际能耗统计对比结果

表2 光电探测系统响应时间统计结果
3 结语
在保证光电探测系统正常运行状态下,为了最大限度地降低系统能耗,在改进PID控制技术的应用下,设计并开发相应的系统能耗优化方法。从性能测试实验结果中可以看出,通过优化方法的应用能够有效地降低系统的实际能量消耗,且光电探测响应时间未受到大幅度影响。然而实验中未对系统的光电探测精度进行测试,因此无法断定能耗优化方法能够完全维持系统的正常运行,在今后的研究工作中需要针对这一问题进一步分析。
