高校工程训练中心智能工具存储柜
2021-11-28张劲东李嘉辉郑可建刘鹏宇
张劲东,李嘉辉,郑可建,刘鹏宇
(天津职业技术师范大学,天津,300222)
0 引言
随着国家第十四个五年规划及2035年远景目标纲要的通过,各地高校纷纷新建工程训练中心,旨在培养国家急需的技能型人才,为“巩固壮大实体经济根基”贡献力量。随着技能教育的大力发展,工程训练中心实训区的工具使用率呈大幅增长态势。相应地,损坏率、丢失率也同样大幅增长。如何有效的、快速的管理工具,防止工具的丢失成了许多高校当务之急要解决的问题。本文研究的智能工具存储柜,通过相关技术的融合解决了无法快速查找和低效管理工具和工具易丢失易损坏等问题,本项目具有良好的应用前景。
1 总体设计
工具柜主要由机械结构部分和电气部分组成。
工具柜机械部分内部传动装置预期采用同步带传动和螺旋传动(丝杠传动),经过大量数据采集及其反复调试后,决定采用丝杠传动装置。
带传动是利用张紧在带轮上的挠性带进行传递动力的一种常用的机械类传动。根据其原理的不同,带传动大致可分为两种,一种为有靠带与带轮间的摩擦力传动的摩擦型带传动,另一种为靠带与带轮上的齿相互啮合来传动的同步带传动。带传动具有结构简单,缓冲吸震,传动较为平稳,成本较为低廉,维护简单等优点。缺点为普通带传动传动比不准确,同步带传动虽然能保证准确的传动比,但在缓冲吸震方面较差,并且在高速运转时有较大的噪声,不符合本智能工具柜的设计理念。
螺旋传动是利用螺杆和螺母之间的配合来将主动件回转运动转化为从动件的直线往复运动的一种常见的机械传动,滚珠丝杠传动是滚动螺旋传动的一种,由滚珠,螺杆和螺母组成。滚珠丝杠传动是精密仪器中最常用的传动部件,滚珠丝杠传动是智能工具柜中机械结构的核心组成部分,它虽然和带传动相比成本较高,但其传动精度和传动平稳性极高,因为工具柜中往往存放的是工程实训中所用的精密仪器,这对工具柜内部传动机构具有较高的传动平稳性要求,否则易造成工具的损坏,经过反复比较和测试后,遂决定采用丝杠传动(见图1)。
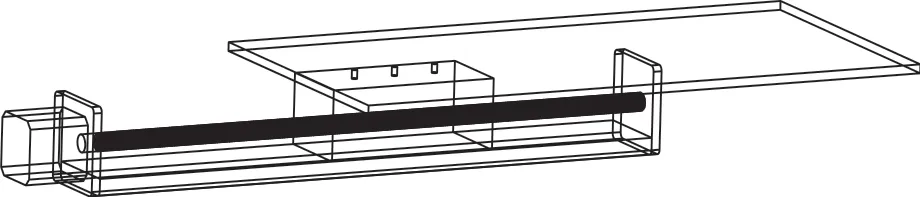
图1
电气部分采用STM32系列微型处理器做控制核心,搭配AC·220V-DC·12V开关电源、传感器模块、无线收发模块、DGUS液晶触摸屏、人脸识别模块、L298N驱动模块等外围电路结合而成。使用OpenMV视觉模块和OpenMV设计软件 OpenMV-IDE。该视觉模块以 STM32单片机为内核,以 OpenMV3为图像采集模块,具有高分辨率、低功耗等优点。 使用OpenMV-IDE, 实现了对图像的采集及失真校正和图像的处理及分析。工具柜控制系统结构框图如图2所示。系统集工具检测、核心控制、余量显示、机械动作四位一体,协同工作,准确有效地检测工具存取情况。
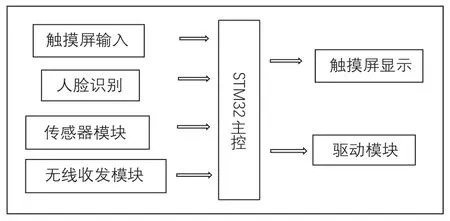
图2
工具柜的存储区采用3D打印模型,根据预先提供的3D模型图纸,制作出PLA材料的工具存储模具,样例模具如图3所示。每个工具存储位都配置有传感器模块,通过外围感知接口与传感设备连接,可以感应工具是否存储、归位。工具柜设计采用液晶显示屏,通过液晶显示器选择功能菜单栏、监控菜单栏,既可以快速选择需要取出的工具,也可以便捷的查看工具柜的归置情况。本工具柜柜体主要原材料采用优质碳素钢板制作,经脱脂,除锈,磷化处理后,表面进行静电粉末喷塑处理,既保证了柜体稳定性、耐用度、美观度,又保证了其承重强度。柜内可自由分隔,标准配置分隔为2×2,即纵向1个分隔板,横向1个分隔片,把柜体分为4格,可实现多种工具同时存储。柜门采用标准有机玻璃,安全环保系数高,同时可以清晰地看到分类有序的各种工具。功能上,安全能力出众,运行稳定,故障率低,基本上可实现免维护或少维护,易于操作,特别适用于频繁使用、快速使用的场合。设计增加实时监控模式,即可以实时查看工具存储情况,通过远程无线传输方式传送到控制中心的网络数据库中;对工具柜本体进行数据实时监控及处理,可以使用户实时观测工具柜状态。
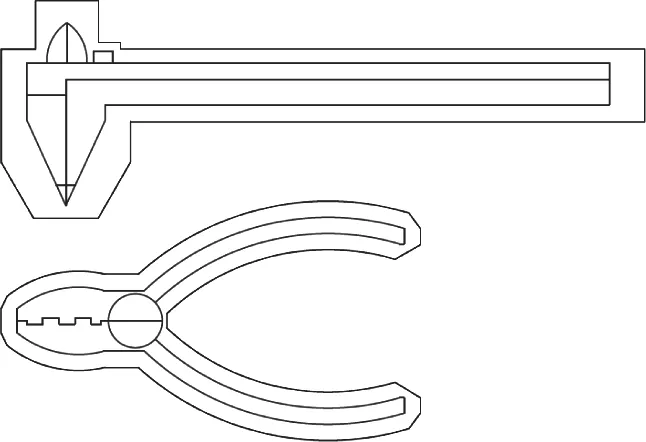
图3
2 设计原理
工具柜的控制系统为实时控制系统,需要核心控制器相比于普通控制器具有较强的处理能力、较高的处理速度和较低的响应速度,才能满足控制系统实时控制的要求。所以只有选择能满足要求的控制器才能更好地实现其控制功能。本设计具有单独控制与联网控制系统,控制系统中的微处理器采用英国ARM公司的32位单片机STM32FI03ZET6为控制核心。STM32FI03ZET6采用cortex-m3内核,在不超频的情况下时钟频率可达72MHz,仅FLASH存储器容量就高达512KB,其包括电动机控制外围设备以及USB全速接口和CAN接口,工作时具有低功率、低电压、运行速度快等优点,并且结合了实时功能,外围设备和软件兼容性为本系统的运行提供了良好的运行环境,高精度计时器、12位模数转换器、PWM定时器,标准和高级通讯接口能够将摄像头与传感器采集到的数据进行快速处理,并通过液晶显示器显示,增强了智能工具柜的整体性能,为使用者创造了便利。
3 系统设计方案
■3.1 硬件部分
工具存储柜智能控制系统主要由人脸识别、电压采样、电流采样、温度采集、数据处理、电机驱动、声音报警、液晶显示模块,8个模块组成,所用各个模块的接口设计如下:
(1)人脸识别模块采用第三代OpenMV Cam采集并处理图像数据,以检测识别人脸面部信息。利用OpenMV摄像头内置Haar模板对通用对象进行检测,并配有Eye Haar模板以及FrontalFace 模板来处理人脸信息,其中人脸检测通过在图像上使用的Haar Cascade特征检测器来工作,人脸识别采用HQVGA和灰度图,其作用可增强人脸识别效果。再通过STM32FI03ZET6的USART通信将识别到的面部信息发送给单片机。
(2)电压采样使用OPA2340运算放大器,该运算放大器针对低电压、单电源工作进行了一定的优化。其电压采样工作原理为:首先通过对衰减完成后的电压信号进行电压跟随,利用STM32FI03ZET6内部高精度A/D转换器直接进行采样。
(3)电流采样使用INA122低功耗仪表放大器,工作特点具有精确、低噪声地差分信号采集。对使用采样电阻转换后的信号进行放大,随后直接使用STM32FI03ZET6内部的参考源进行A/D采样。
(4)温度采集采用DS18B20数字温度传感器,具有体积小、抗干扰能力强和精度高的特点。通过一线通信接口发送采集到的实时温度数据,微控制器采用I/O口模拟接收数据并进行数据处理,DS18B20与微控制器连接时通过一条口线实现DS18B20与微控制器双向通讯。
(5)数据处理模块由信号采集电路、调理电路以及传输电路构成。其中信号调理电路先使用仪表放大器实现信号的共模抑制和放大,然后使用二阶巴特沃斯低通滤波器实现滤波功能,二阶巴特沃斯低通滤波器具有阶数低、数据量小、平滑滤波无超调的特点。其采集到的数据将采用ModBus通信的方式经USB发送到上位机显示。
(6)电机驱动模块使用L298N专用驱动集成电路,具有控制两个直流减速电机的功能,其电压范围6V-46V,提供2A的电流,并具有过热自断和反馈检测功能。对微控制器发出的TTL控制信号进行放大,直接驱动负载电机工作。
(7)声音报警模块利用NE555芯片其具有体积小巧、重量轻便、可靠稳定、操作电源范围大、输出端供给电流能力较强、计时精确度较高,温度稳定性较好的特点,其可搭建脉冲输出电路,通过微控制器给NE555脉冲电路发送不同频率的控制信号,电路即可输出不同频率的脉冲信号,从而实现不同效果的声音报警效果。
(8)液晶显示采用DGUS液晶触摸屏,通过USART的方式使用STM32FI03ZET6对变量存储器的代码读写来实现人机界面的显示,主要可进行的人机交互的功能有:①时间显示、②一卡通操作、③二维码操作、④人脸识别操作、⑤管理员模式共五部分功能。
■3.2 软件部分
系统使用的软件是控制系统的核心,它直接影响到了智能工具柜运行时的整体性能。本系统以STM32FI03ZET6单片机为核心进行软件设计,整体的编写语言为C语言,程序使用keil uvision5编程软件制作,整个系统由主程序、数据采集子程序、人脸识别子程序、数据处理子程序、电机驱动子程序、声音报警子程序、液晶显示子程序、电机驱动子程序等组成。系统整体运行框架采用主循环和定时器中断相结合,在主循环中实现液晶显示功能。通过定时器可对温度等传感器进行数据采集以及算法处理。并且通过对数据实时监控,实时观测到数据库中的数据,及时发现异常情况。用户使用时,首先需要接通220V电源,等待设备进行各个模块的上电初始化,主要有系统时钟设置、定时器中断、延时函数、人脸识别系统接口和DGUS液晶触摸屏通讯接口连接等初始化。在初始化完成之后,主程序进入循环工作模式,并且显示当前工作状态。当工具柜检测到有用户需要进行工具的存储,首先提示用户做出存取选择,等待用户自行选择。待当前工作流程结束之后,系统将会再次循环进行检测,等待下一个用户的指令。
系统的主程序流程图如图4所示。
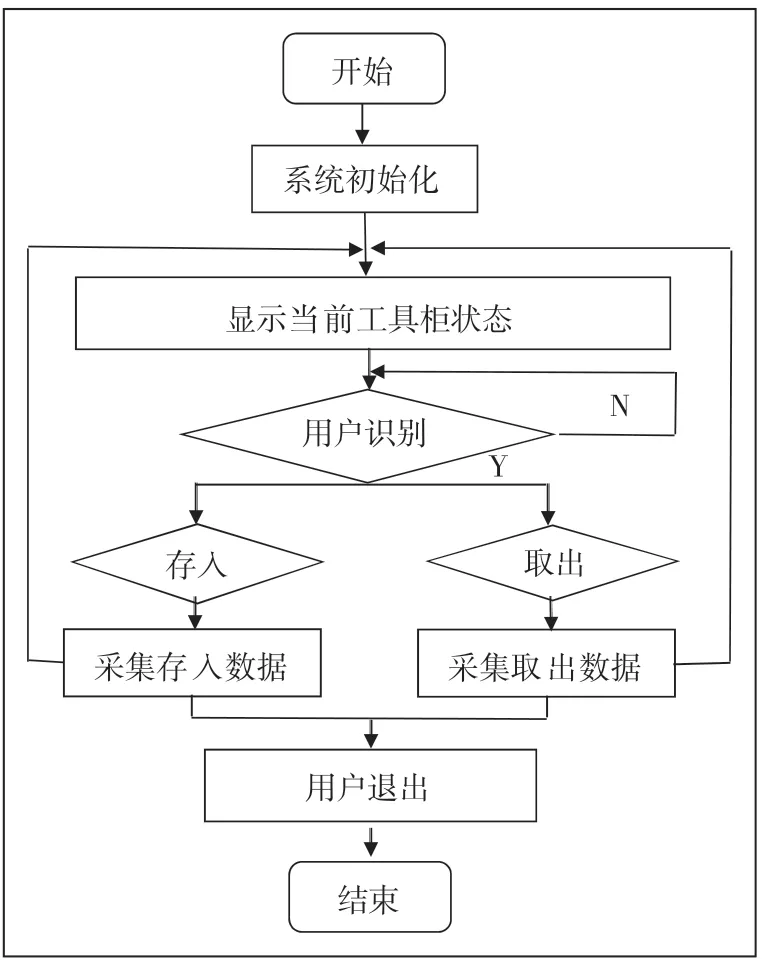
图4
4 分析与结论
适用于工程训练中心实训区的工具存储柜,运用现代信息化技术,为工具提供了合理的归置场所,很大程度的改善过去传统工具柜的局限性,使得工具柜具有了多样化的功能。与目前市场传统的工具柜相比拥有诸多的优势,通过对工具柜存放结构部分的设计,在有效保护工具的同时又避免了工具经常丢失的情况。经过调试运行可以发现,系统的各个功能模块运行基本正常,实现了预期的工作目标。下一步将尽快对系统各方面性能进行优化,并在实际场所测试验证其性能。
