基于KV31的无刷直流电机控制系统设计
2021-11-27尹相国赵莅龙修方强赵永瑞
尹相国,赵莅龙,修方强,赵永瑞
(1.中国石油大学(华东)机电工程学院,山东 青岛 266580;2.青岛新前湾集装箱码头有限责任公司,山东 青岛 266520;3.山东大学机械工程学院,山东 济南 250061)
0 引言
近年来,随着技术水平的日益提高以及对环保和效率等方面的需求不断增加,提出了智慧港口和节能港口的建设目标。港口机电设备的升级改造是其中的重要组成部分。电机系统作为港口机电设备的重要组成部分,通过提高其能源利用率可以使设备的能耗大幅降低。主要方法包括采用高效节能电机,或者对电机控制系统进行节能改造。以此提高整个系统的工作效率,优化系统控制以及运行[1]。
目前,港口机械各运行机构的驱动电机主要采用鼠笼式三相异步电机。其生产制造成本低,构造相对简单,保养和维修成本相对较低。但缺陷是速度调节能力差,必须采用变频设备才能对电机的速度进行调节;同时,其自身功率因数相对较低[1]。
无刷直流电机(brushless direct current motor,BLDCM)的性能表现优异,速度调节能力好,运行过程中的效率高且稳定可靠。同时,电机的转矩输出大,功率因数高[2]。
因此,本文提出以无刷直流电机作为港口机电设备的驱动电机。作为无刷直流电机的关键组成部分,控制系统的优劣对于电机性能表现起着重要作用。
1 系统整体设计方案
无刷直流电机除电机本体以外,通常还包含转子位置测量与电子换相电路。其中,电子换相电路由数据处理与功率驱动2部分组成。
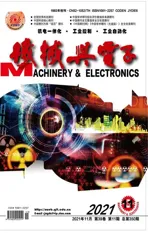
无刷直流电机的有效控制离不开实时传感,功率驱动板上的传感器采集电压和电流信号,TMR位置传感电路采集电机实时位置信号。控制电路对这些信号进行分析计算,然后生成相应的PWM信号,控制驱动电路中功率管的开关,调节电机的运行[3]。整体设计方案如图1所示。
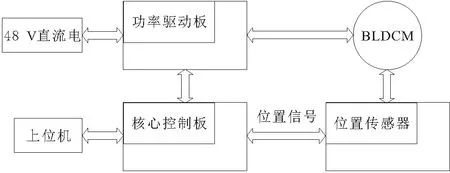
图1 无刷直流电机整体方案
2 系统硬件设计
无刷直流电机控制系统的硬件电路设计主要分为驱动电路、控制电路和位置传感电路。
2.1 驱动电路设计
2.1.1 栅极驱动供电电路
栅极驱动芯片的工作电路需要15 V的供电电压,为此设计了相应的供电电路,如图2所示。

图2 预驱动供电电路
该电路的核心元器件为LM317输出可调节稳压模块,其输出值可以从1.2 V至37 V任意调节,能够利用2个外接电阻确定具体输出值。输出电压计算公式为
(1)
当R1为200 Ω,R2为2.15 kΩ时,VO=14.687 5 V,近似接近于15 V。
2.1.2 电流采样电路
功率板上需要相电流和直流母线电流的信号采样电路,并将采集到的信号传递给MCU,为电机程序的运行提供实时数据。目前主流的电流信号采样电路有2种:分立元件组成的电路和电流传感器电路[4-5]。
采样电阻与集成运放组成的采样电路成本较低,但设计相对复杂,且精度较低;电流传感器方案采用集成元件,电路设计更为简单,采样精度更高。经过对比分析,本文采用后者,传感器选用英飞凌的TLI4971,工作电路如图3所示。
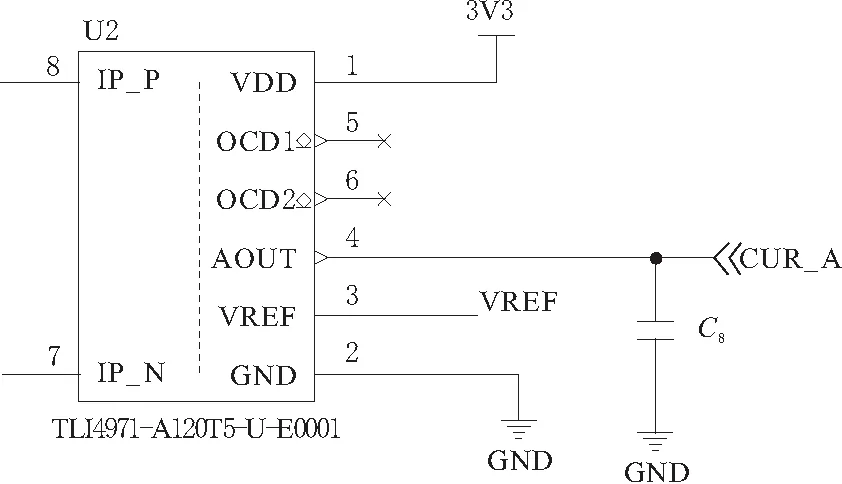
图3 电流采样电路
TLI4971电流传感器的内部集成差分测量,能有效克服周围电磁的扰动。基于经典测量方式设计的电流传感器,环境条件(如温度)对测量精度的影响较大。相比之下,TLI4971电流传感器的测量结果更为精确,可以达到闭环系统的水平。
同时,该传感器配置有可编程滤波器,能够克服杂散磁场,因此,该传感器受外部磁场的干扰较弱。在可预先配置的电平上,该传感器可以迅速检测过电流,此功能允许控制单元独立于主测量路径关闭,防止功耗器件损坏。
2.1.3 直流母线电压采样电路
在该直流母线电压的测量电路中,其采样电阻连接至直流母线的正、负极。输出需要并联0.1μF的稳压电容。输出电压为
(2)
2.1.4 栅极驱动电路
通常选用专门的驱动电路为MOSFET的栅极提供驱动电流并施加高低电平。
栅极驱动器可以对微控制器的PWM信号进行放大,增大驱动能力。如果用MCU直接驱动MOSFET功率开关电路,可能会使MCU的温度过高,进而损坏。与微控制器相比,栅极驱动具有更高的驱动能力,同时能够迅速切换开关状态。这样能够降低开关过程中的功率损耗,提升工作效率[6]。
栅极驱动器还可以起到隔离的作用。应用栅极驱动器对低压控制电路和功率开关电路进行隔离之后,如果功率开关电路发生故障,损坏的仅仅是高压侧电子元件,不会对低压侧的控制电路造成损坏,同时还可以保障人员安全。
2.1.5 功率开关电路
FDMS8090的内部集成2个相同的N沟道MOSFET,在设计功率开关电路时作为每相的上、下桥臂。关断电源后,BLDCM处于发电状态,220 μF(100 V)的电容用于此时的能量储存。
2.2 控制电路设计
2.2.1 复位电路
尽管MCU的片内包含上电复位电路,上电时能主动输出复位信号,但为了调试方便,可添加外部复位按键。简单的按键与阻容就能构成外部复位电路,如图4所示。
当按下SW3按键时,RESET处于低电平,系统产生复位信号;当松开SW3按键时,电源对C15充电,当RESET电压大于低电压阈值,微控制器恢复正常工作状态。
现在学生作文普遍存在一个问题:明确了文章主题,也有一些写作素材,但总是描写不具体、抒情不细腻,显得空洞抽象、平淡单薄,不能给人以深刻印象,更不能打动人心。特别是亲情类的记叙文,更是千人一面,大多都是“半夜发烧送医院”和“雨中送伞”。仔细研究,你会发现造成上述问题的原因在于学生缺乏细致的观察与没有生动的细节描写。而细节描写在作文中具有举足轻重的作用,成功的细节描写往往能达到“一瞬传情,一目传神”的艺术效果。好作品之所以感人肺腑,就是因为有精彩动人的细节描写。说细节是文章的生命毫不为过。
2.2.2 晶振电路
根据KV31参考手册要求,选择8 MHz的无源晶体,搭配2个18 pF的电容组成晶振电路,并联1 MΩ的电阻作为阻抗匹配,改善电路性能,如图5所示。

图5 晶振电路
2.3 位置传感电路设计
TLE5501是基于TMR原理的角度传感器,可用于确定磁场的方向。工作原理是利用TMR元件测算sin与cos分量。其内部结构如图6所示。
图6 TLE5501内部原理
传感器内置8个TMR电阻元件,每个电阻的阻值由外部磁场的方向决定。2个独立的惠斯登电桥分别感应磁场在X和Y轴方向的分量。转子转动过程中,电桥的差分输出呈现sin曲线与cos曲线变化,可以在微控制器中直接进一步处理。电桥的输出电压较大使得不需要信号放大电路。
TLE5501的工作电路如图7所示,传感器内的电阻与输出引脚上并联的电容构成RC低通滤波电路,提高了电路的抗噪声性能。
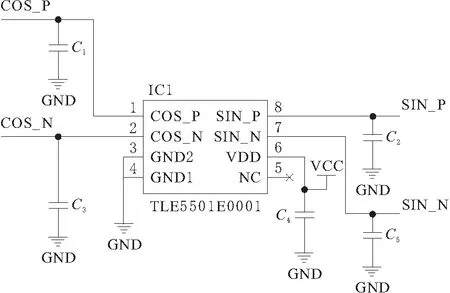
图7 TMR转子位置测量电路
3 系统软件设计
软件设计需要结合控制需求及硬件电路综合考虑,其中控制需求主要是实现电机平稳转动以及对故障信号的实时响应。
与embOS和MQX等嵌入式实时操作系统相比,FreeRTOS的内核比较小,调度策略非常灵活,源码全部公开,可裁减性和可移植性好并且完全免费,可以运行在各类微控制器上。FreeRTOS的功能基本能够满足较小系统的要求[7]。
在程序设计中,状态机是非常重要的编程架构。在整个无刷直流电机控制过程中,需要经过多个状态,如停止状态、运转状态和故障状态等。采用状态机的方式,可以使控制逻辑简单明晰[8]。
3.1 速度环控制任务
在速度环控制任务中,首先比较实际速度与目标设定值,如果已达到目标速度,则无须计算滑模速度控制器。如果没有达到目标速度,首先对目标速度进行调制,将目标速度与实际速度之间的速度差分解为多步实现,避免速度控制器产生角度的超调。然后计算调制后新的目标速度值与实际速度的偏差,并将其输入至滑模速度调节器进行运算,输出新的Q轴电流。速度环控制流程如图8所示。

图8 速度环控制任务
3.2 ADC中断程序设计
数模转换完成以后会触发ADC中断。在中断服务程序中,首先读取电流和电压的测量值,并且对电压值进行数字滤波;然后执行磁场定向矢量控制(field oriented vector control,FOC),并且更新三相电压值。
作为ADC中断程序中的核心,FOC控制算法需要计算电流控制器并且进行空间矢量调制,如图9所示。首先计算当前角度的sin/cos值,用于后面的坐标变换;然后进行Park变换和Clark变换;接下来就是根据位置传感器的输入进行位置和速度计算并对速度值进行滤波;如果电流环开启,那么要进行电流控制器的计算,然后进行反Park变换以及空间矢量调制。
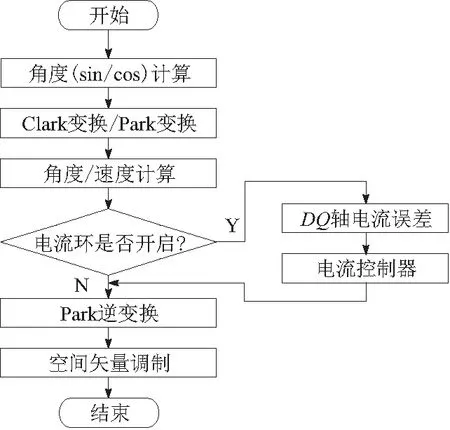
图9 FOC控制算法流程
3.3 PDB中断
测量作为控制系统不可或缺的一部分,为了实现精确、快速的控制,需要在反馈系统干预前获得实际数据。特别是,必须在正确的时间点测量周期信号,否则可能会得到不准确的值。如果在脉冲宽度调制周期的中间进行测量,则无需任何其他计算即可获得电流的平均值。
因此,为了尽可能的获取准确的电压和电流信号,将ADC转换设置在PWM周期的中间位置。PDB作为可编程延时模块,将其定时值设定为PWM周期的一半。当PDB的计数达到设定值,触发ADC转换,从而实现FlexTimer与ADC的同步,如图10所示。

图10 外设关系
FTM与ADC同步不仅可以获得电流的平均值,还可以使测量不受功率开关的干扰,有助于过滤测得的电流;ADC中断程序执行之前,所有处理都只能由硬件完成,无需计算能力。
4 试验测试
4.1 试验平台搭建
为测试控制系统性能,搭建试验平台,主要包含J-Link仿真器、控制器(包括核心控制板和功率驱动板)、磁滞制动器、扭矩传感器和电机本体等,如图11所示。

图11 测试试验台
4.2 测量结果及分析
根据港口机械的工作环境,确定电机的性能要求为能够保持速度稳定,且受到负载冲击后速度变化较小。为此,设计不同转速下的空载试验以及负载试验。
首先进行电机的空载试验,分别测试在不同设定转速下电机空载启动后的转速情况,试验数据如表1所示。

表1 空载试验数据
由表1可以看出,随着设定速度的增加,超调量越来越小,稳态方差也随之减小;当设定速度为4 000 r/min时,稳态误差较大,说明额定转速时的速度跟踪效果较差。
然后进行电机负载试验,在以恒定转速运行过程中,施加突变负载后测量电机的速度变化,如表2所示。
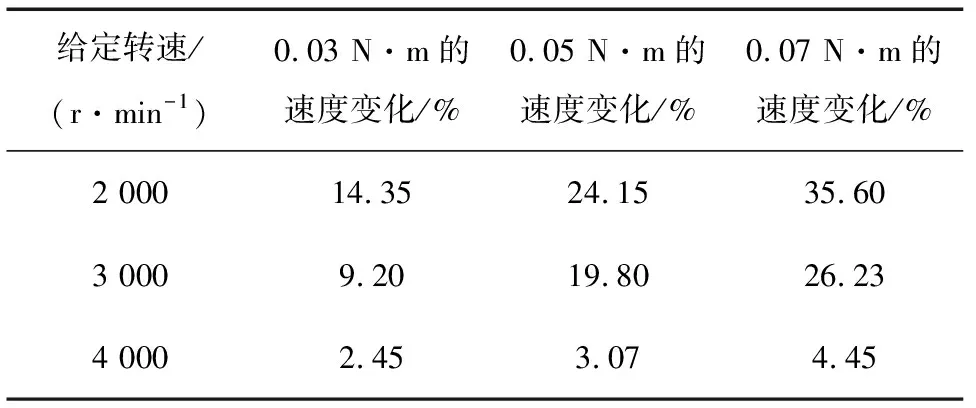
表2 负载试验数据
可以看出,在2000 r/min和3 000 r/min下,施加负载,速度会有突变,并且负载值越大,速度的突变量越大,但是1.2 s左右就能够恢复到设定值。在4 000 r/min时,施加负载以后,稳态速度会下降,并且随着负载值越大,稳态速度误差越大。
综上所述,在额定转速时,系统的速度跟踪能力以及抗负载能力较差;在设定速度小于额定值时,系统能够保持速度稳定且具备较好的抗干扰能力。
5 结束语
本文选用恩智浦的KV31高性能电机控制MCU作为核心元件,针对港口机电设备的实际工况,实现BLDCM控制系统的设计。
首先详细介绍了控制系统的总体方案与软硬件设计主要内容,然后通过空载及负载试验测试控制系统的速度调节能力。
通过数据分析可知,整个控制系统的软硬件能够达到设计目标,验证了KV31的应用可行性;同时为港口机电设备的升级改造提供了思路。