星载SAR聚束成像模式特点分析与研究
2021-11-27黄静孙赫王刚岑鹏瑞
黄静 孙赫 王刚 岑鹏瑞
北京市遥感信息研究所,中国·北京 100011
1 引言
雷达成像对地观测卫星是成像观测卫星发展的一个重要方向,而合成孔径雷达(SAR)卫星在这一领域近年发展迅速,已经成为卫星对地观测中的后起之秀[1]。合成孔径雷达具有全天候对地观测能力,有良好的方位分辨率和距离分辨率,有一定的侧视能力和动态目标探测能力,能穿云可破雾,对水域和地表也有一定的穿透能力。它克服了可见光遥感拍摄对地观测的不足,可不分昼夜开展全天时、全天候观测。
天线方位向尺寸会限制条带模式SAR 的影像方位分辨率。一些特殊领域对地观测对遥感影像分辨率和精度方面的要求越来越高,研究人员尝试研究通过对天线进行调整,使波束在一段时间内保持照射地表面同一片区域,这样获得的合成孔径会更长,合成孔径越长,方位多普勒带宽越高,通过这样的方式采集的高分辨率卫星图像不再受天线本身尺寸的限制,这种SAR 成像工作模式被称为聚束模式SAR[2,3]。
20世纪60年代聚束模式SAR 还处于实验阶段,70年代发展到系统使用和测试阶段,90年代开启应用阶段,发展出一批实际机载使用的聚束模式成像的SAR 系统。到了21世纪,聚束模式SAR 由机载发展到星载,迅速向太空领域发展,越来越多国家航天领域正在运行使用的星载SAR成像系统具备聚束成像工作模式。
“长曲棍球”卫星是美国著名的军事应用卫星,1988年12月2日发射入轨,轨道倾角为57°,其聚束模式方位分辨率可达1m,主要用于小范围目标,可精确获得局部重要地区需要的图像数据信息。后来,美国又先后于1991年、1997年、2000年和2005年发射四颗长曲棍球SAR 卫星用于军用领域,这四颗卫星雷达均具备双侧视功能,每日可绕地球12 周进行全球观测,在观测条件很不利的夜间或多云天气分辨率也可达0.3m,即使隐藏在可见度较低的森林中的地面装备也能观测到。美国Capella 公司是美国第一家能够持续提供SAR 数据服务的公司,Capella 于2020年开始部署一个由36 颗小型雷达卫星组成的星座,主要功能是探测和跟踪地球表面的变化和人类活动,该星座系统可快速规划卫星任务,用户响应时间平均小于90min,并实现低于0.5m的超高分辨率,全天候提供图像服务,加深人类对瞬息万变的世界的了解。
由德国航空航天中心(DLR)和联邦教育与研究部(BMBF)联合实施研制的TerraSAR-X 于2006年发射,其飞行轨道与太阳同步,轨道高度509km,每日绕地15 周,其聚束模式SAR 可以获得10km×5km 区域上的(1.5~3.5m)×1m 高分辨率图像。2010年,EADS Astrium 公司与DLR联合研制的TanDEM-X 雷达卫星发射升空,与TerraSAR-X卫星组网编队飞行,构成一个分辨率1m 的高精度高分辨率雷达干涉测量系统,可获取全球高精度高分辨率数字地形模型数据。此外,德国2006—2008年陆续发射五颗SAR 卫星Sar-lupe,组成军用星座系统,已具备可变视角功能和聚束工作模式,通过姿态控制方式实现,其中聚束成像模式分辨率优于1m;2013年10月,TerraSAR-X 卫星升级后新增两种成像模式;其中,宽扫描模式提高了观测的覆盖广度和范围,凝视聚束模式提高了成像分辨率;2018年2月22日,空客公司发射SAR 卫星“帕斯”(PAZ),与TerraSAR-X和TanDEM-X 卫星形成SAR 星座,重访时间更短、获取能力与覆盖能力更强。
法国空间局与意大利空间局(ASI)和合作研制的Cosmos-Skymed 小卫星系统也有聚束工作模式,主要工作区域是地中海地区,主要用途是进行灾害监视、环境监测、和军事目标探测。
总之,聚束模式合成孔径雷达成像已经成为合成孔径雷达领域的研究重点和热点,特别受到国际上各军事和航天比较发达国家的重视。论文在分析合成孔径雷达聚束工作模式的基本原理的基础上,总结了星载SAR 聚束成像模式特点。
2 星载SAR 聚束成像模式空间几何特点
SAR 实现方位向较高的分辨率,主要是通过聚束成像模式来实现,即通过长时间照射地表一块不变的区域,来获得比条带SAR 更大的合成孔径长度,方位向分辨率也随之更高,图1给出了聚束SAR 工作示意图。它可广泛用于观测设备特别是星载设备对对面特殊目标的精细成像。与条带模式成像不同的是,聚束模式成像时天线的指向需要实时变化,以确保在一个成像周期内,天线保持照射同一片区域,这样的要求增加了系统实现难度和复杂性。
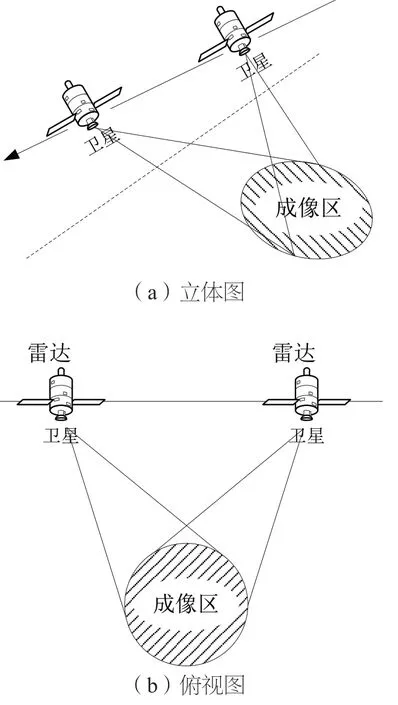
图1 聚束SAR 工作示意图
天线波束方向的调整可以获得更长的合成孔径成像时间,这就是聚束成像模式,该模式也应用了多普勒频移理论,成像处理可用到匹配滤波理论。条带成像模式与聚束成像模式在原理上也有相似之处,聚束成像模式,二者在运行过程中都具有相同的平动,不同的是,天线波束在聚束成像模式下还会相对于目标区域进行转动,医学上的计算机辅助X 射线层析照相(CAT)原理与其相似,因此还可以从CAT角度对聚束成像模式成像原理进行解释。
星载SAR 聚束成像模式卫星轨道和地球曲率的空间几何复杂性很高,天线控制难度也较大,地球自转也会带来很多问题。图2给出了星载SAR 聚束成像模式空间几何关系的示意图。O 点为地心,球半径为RE,A 为合成孔径起点,C 为终点,B 为合成孔径上任意一点。在合成孔径成像周期内,天线波束一直保持照射以T 为中心的地表同一片区域。从图中不难看出,采集数据期间,天线波束保持照射同一块场景区域,实现聚束照射。
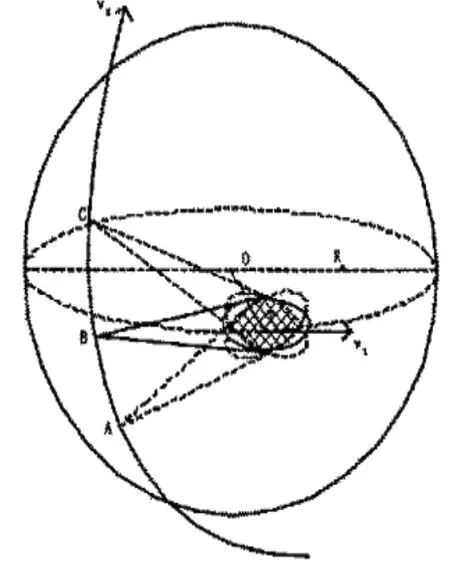
图2 星载聚束式SAR 空间几何
为了更形象直观地说明星载SAR 聚束成像模式与星载SAR 条带成像模式以及机载SAR 聚束成像模式三者的区别,图3和图4分别给出了星载SAR 条带成像模式与机载SAR聚束成像模式的空间几何示意图。
图3给出了星载SAR 条带成像模式的空间几何关系图,O 点为地心,卫星以速度vs沿轨道运动,H 为轨道高度,S为某一时刻卫星在轨道上的位置,P 为对应的星下点,天线波束中心照射地表目标点T,vT为目标运动速度,RE为地球半径,卫星在飞行过程中,雷达对地表持续照射从而获取数据,图4中条带状阴影部分为雷达波束扫过的区域。
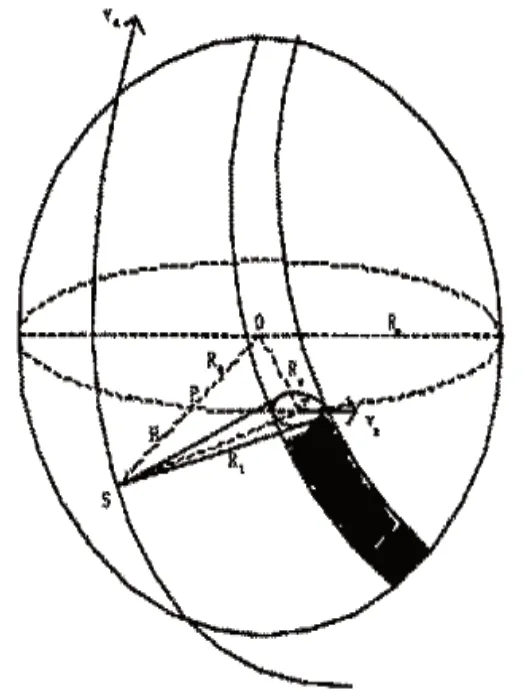
图3 星载SAR 条带成像模式的空间几何关系图
图4给出了机载SAR 聚束成像模式的空间几何关系。在一个完整的合成孔径成像周期内,多次调整雷达天线指向,使其保持照射地表同一片区域。便可获取更长的合成孔径长度和更高的方位分辨率,且不受天线方位孔径长度的限制。

图4 机载SAR 聚束成像模式的空间几何关系
星载SAR 聚束成像的空间几何关系受到地球模型、卫星轨道、地球自转等多种因素的影响,还要对波束指向进行调整控制,其复杂度远远超过星载SAR 条带模式和聚束模式各自复杂度的简单叠加,是二者进行有机综合的结果。
采集数据的过程中,在条带成像模式下天线波束的指向保持不变,而在聚束成像模式中需要对天线波束指向作实时调整,这是两种模式最本质的区别,也是导致回波信号的多普勒频率分布不相同的原因,如图5所示。

图5 方位向多普勒频率历程
图中Tα为合成孔径时间,Bα为回波信号瞬时多普勒带宽,Bd为点目标回波多普勒带宽。
综上所述,聚束成像模式与条带成像模式的差别见表1。
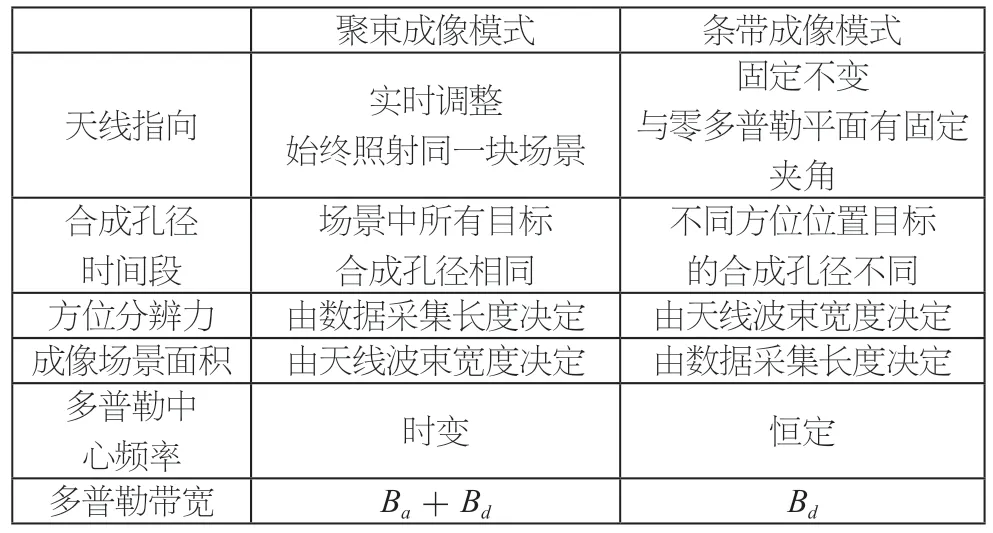
表1 条带成像模式与聚束成像模式比较表
3 星载SAR 聚束成像模式多普勒频率特性
相对于条带模成像模式,聚束成像聚焦处理中存在一些特殊情况如下:二维运动方面的分辨单元(MTRC)现象、时间变化方面的多普勒中心频率、空间变化方面的相位历程,还有方位与距离之间的严重耦合等。空间变化的相位历程表明空间位置上的各个散射点需要相对应的聚焦函数,聚束成像模式SAR 独特的多普勒频率和带宽特性,则是由时间变化的多普勒中心频率导致的,下面将主要探讨成聚束模式SAR 的这一特性。
雷达视线角度的不断变化随之带来多普勒中心的变化,聚束成像模式的多普勒中心频率则是随方位时间的改变而改变的。从多普勒频率的计算公式,可得出聚束模式的多普勒频率为:

其中,x为成像区域点目标位置,θ表示t时刻位于x处点目标的斜视角,假设合成孔径时间为Ts,成像区域方位向宽度为Wa,则有:

其中,x0为成像区域中心位置,由于聚束成像模式始终照射同一区域,因此可认为成像区域中心位置即为波束中心照射的位置。为方便,以下只讨论前斜视情形。由(1)~(3),可知:

其中,斜距为:

由(4)、(5)可得:

其中,t0为零多普勒时刻,即x0=vst0(6)中第二项即为多普勒中心频率,显然多普勒中心频率是随方位时间t变化的,且单调下降。由(6)可知多普勒带宽为:

由(7)可知,若记:
则多普勒带宽:

其中,Ba即为回波信号瞬时多普勒带宽,且随方位时间t而增加,而Bd则为点目标回波多普勒带宽,且是恒定的。由(10)可知,聚束成像模式SAR 的多普勒带宽是随方位时间而增加,且远大于条带成像模式SAR 的多普勒带宽。这一点是聚束模式SAR 区别于条带模式SAR 以及扫描模式SAR 最重要的特征之一。
4 星载SAR 聚束成像模式脉冲参数特点
聚束模式SAR 是利用在一段时间内照射同一片区域,来获得比传统模式更长的合成孔径和多普勒带宽,进而让得到的方位向分辨率更高。因此,根据采样定理,则要求很高的脉冲重复频率才能避免方位向频谱的混叠。但是脉冲重复频率太高又会导致观测带宽度减小且会使距离模糊度增加。另外,数据率越大,脉冲重复频率越高,二者成正比关系。在要求数据实时下传的情况下,将给数传系统带来较大的时效压力。
因此,对于聚束成像模式,需要提供一种以较好的成像算法,能够有效降低系统对脉冲重复频率的要求,解决高分辨率需求与宽观测带之间的矛盾,同时运算量还要尽可能小、精度尽可能高。Deramp Chirp Scaling (DCS)算法就是这样一种算法。这是因为聚束式SAR 模式的多普勒带宽虽然很大,但是每个点目标多普勒历程和多普勒带宽均相等。所以,要使方位向的信号带宽降低,可以通过在原始信号方位向上减去一个固定调频率的chirp 相位,从而对PRF不需要过高要求。DCS 算法是对Chirp Scaling 算法的改进,把Deramp 过程加在原Chirp Scaling 算法之前,去除一个固定调频率的二次相位,能过这种方式使信号带宽降低。在Deramp 的计算过程之后再用Chirp Scaling 算法进行成像处理。因此,聚束成像模式可以采用瞬时多普勒带宽Ba作为脉冲重复频率的选择依据。
另外,从图像处理来说,高方位向分辨率需要具有高距离向分辨率与之相匹配,而高距离向分辨率需要大信号带宽。因此,从工程实际来说,采用聚束成像模式,SAR 信号带宽至少应该大于100M。
根据聚束成像模式的工作原理,聚束式SAR 需要长时间照射同一小块固定的区域,使得侦收站与波束主瓣的相对空间位置变化不大,也即侦收信号的发射天线增益变化不大,从而其相对幅度变化不大。
综上所述,由聚束成像模式的工作原理和多普勒特征,可以形成总结出星载聚束SAR 成像模式脉冲参数特点。在单次侦照任务期间,具体表现在以下几点:
①脉冲重复间隔呈阶梯状下降(或上升);
②瞬时带宽保持不变,而且至少100M 以上(现有卫星情形);
③脉冲相对幅度变化不大;
④脉冲宽度保持不变;
⑤平均功率保持不变。
其中,由于瞬时多普勒带宽Ba是随时间单调下降的,且对其量化后使得脉冲重复间隔(脉冲重复频率的倒数)呈阶梯状上升,若脉冲重复间隔呈阶梯状下降则聚束合成孔径雷达采用的是后斜视方式。
5 结语
聚束模式成像是通过改变天线波束指向,使天线波束中心视角随卫星运动方向不断转动变化,从而实现较长时间聚集照射同一区域的一种成像模式。聚束成像模式是实现方位向高分辨力的一种有效手段,可以获得比条带成像模式难以达到的超高分辨力图像,可以实现对重点目标精细成像。论文通过对星载SAR 聚束成像模式的空间几何特点和多普勒频率特征的分析和研究,对比了星载SAR 聚束成像模式与星载SAR条带成像模式和机载SAR聚束成像模式的差异,总结了星载SAR 聚束成像模式特点,对于SAR 聚束成像模式影像产品的应用具有参考价值。
