光电侦察吊舱对海广域搜索方法
2021-11-27方喜波
方喜波
光电侦察吊舱对海广域搜索方法
方喜波
(凯迈(洛阳)测控有限公司,河南 洛阳 471009)
光电侦察吊舱对海搜索方式与搜索范围是直升机对海搜索效率与搜索力配置研究的基础。基于直升机及其光电侦察吊舱的性能特点,提出了直升机对海搜索的两种基本搜索方式和覆盖面积;建立了直升机搜索面积计算模型,为直升机系统采用不同的搜索方式进行搜索时计算其搜索效率和搜索力的配置提供了决策依据。为了易于搜索区域发现感兴趣的目标,同时介绍了针对扫描搜索区域图像拼接的处理方法。
光电侦察吊舱;伺服控制;图像拼接
0 引言
我国是一个海洋面积广、海岸线长的国家,也是台风海啸和海洋事故多发的国家,每年各种灾难给人民群众和国家带来了巨大的生命和财产损失。中国海上搜救中心及全国各级搜救中心先后在上海成立了东海第一救助飞行队,在厦门成立了东海第二救助飞行队,在蓬莱、大连成立了北海第一救助飞行队,在湛江、三亚成立了南海第一救助飞行队,配备了多架专业救助飞机和光电搜救设备,预警灾难的发生和灾难后的抢救工作,达到最大程度减少人员伤亡的目的。
通过配备高清可见光摄像机、大面阵凝视红外热像仪、高精度激光测距机、图像跟踪器和伺服控制分系统等组成一个综合的光电侦察系统。该系统具备稳定清晰成像,目标识别/跟踪和广域快速搜索等功能,达到广域高效综合的侦察搜救的目的。该系统可装配于各种载体,如搜救飞机、搜救船、搜救车和飞艇等;可应用于救灾监视、执法取证和搜索救援等领域。
1 系统组成及工作原理
介绍某型搜救直升机配备的光电侦察吊舱的组成情况。其主要由光电转塔、操纵杆控制器、减振装置及地面检测仪组成。光电转塔由伺服控制组件控制的稳定平台、可见光摄像机、红外热像仪、激光测距仪和图像跟踪与处理器等组成。稳定平台主要作用是承载可见光摄像机、红外热像仪、激光测距机;结合减振装置来消除载机振动和摆动带来的干扰,保证视轴在惯性空间的稳定性,图像的清晰度,并能为可见光摄像机或红外热像仪提供足够大的搜索范围。最终光电侦察吊舱通过减振装置安装在载机安装任务载荷的合适位置。光电侦察吊舱组成,按照参考文献[1]如图1所示,三维仿真图如图2所示。
图1 光电侦察吊舱组成框图

图2 光电侦察吊舱仿真图
2 相关指标
依据单机前向横扫和单机侧向推扫两种基本的对海搜索方式进行如下指标分析。
2.1 载机飞行条件
1)飞行高度:≤3km;
2)巡航速度:≤240km /h(航拍最佳速度50km/h~100km /h)。
2.2 稳定平台
1)搜索范围
①方位轴:360°×(连续);
②俯仰轴:+110°~-20°(光轴水平向前为0°,向下为正);
③搜索角速度:≥60°/s。
2)广域搜索方式
①前向:俯仰0°或45°固定、方位±90°“一”字扫描(光轴水平向前为0°,向下为正);
②侧向:方位90°固定,俯仰+90°~+10°“一”字扫描(光轴水平向前为0°,向下为正)。
2.3 高清可见光摄像机
1)像元数:1920×1080;
2)视场:18°×10°~3°×1.67°;
3)帧频:30帧/s。
2.4 中波红外热像仪
1)像元数:640×512;
2)视场:
宽视场:16.5°×13.3°;
中视场:8.3°×6.6°;
窄视场:4.15°×3.3°。
3)帧频:50帧/s。
3 对海搜索要素分析
3.1 基本假设
1)直升机定高匀速直线飞行;
2)光电侦察吊舱采用最基本的两种推扫方式:第一种与直升机航向一致侧向推扫,第二种与直升机航向垂直前向横扫。
3)探测器积分时间内像移小于1/2个像素认为清晰成像。
3.2 分析计算
装载光电侦察吊舱的直升机实现对海广域搜索,前提条件是搜索过程中光电侦察吊舱配装的可见光摄像机和红外热像仪必须清晰成像。如何保证可见光摄像机和红外热像仪清晰成像,必须考虑以下两个方面因素:第一方面因素是光电侦察吊舱广域搜索的方式(按照上述两种搜索方式)和搜索的角速度大小;第二方面因素是直升机飞行的速度和飞行的高度。现结合可见光摄像机和红外热像仪最小视场的焦距、探测器单象元尺寸和积分时间进行综合分析。
1)第一方面光电侦察吊舱搜索的角速度大小
本系统的红外热像仪是三视场红外,其探测器单个像元尺寸为15mm,探测器积分时间≤3ms。可根据式(1)计算在红外热像仪3个不同视场下,光电侦察吊舱俯仰方向推扫角速度的关系,如表1所示:
对于本系统的可见光摄像机是连续变焦的光学镜头(分析计算时只考虑最大视场和最小视场),其探测器单个像元尺寸为2.8mm,探测器积分时间≤0.5ms。按照红外热像仪计算原理也可根据式(1)计算可见光摄像机在最大和最小视场时,光电侦察吊舱俯仰推扫的角速度的关系,如表2所示。

表1 红外热像仪的视场与俯仰方向推扫角速度W关系
表2 可见光摄像机视场与俯仰方向推扫角速度W关系
2)第二个方面直升机的速高比
设定直升机飞行高度3km时,最大的飞行速度为240km/h(67m/s)。由上文可知,本系统的红外热像仪为3视场红外,其探测器单个像元尺寸为15mm,探测器积分时间≤3ms。可根据公式(2)计算在直升机不同飞行速度,红外热像仪3个不同视场与俯仰角度的范围关系,如表3所示。

可见光摄像机计算方法与红外热像仪原理一致,通过分析计算光电侦察吊舱推扫俯仰角度范围∈[+110°~-20°],覆盖了光电转塔俯仰方向搜索的角度范围。
通过上述分析,在直升机飞行速度≤100km/h,光电侦察吊舱成像传感器处于大视场成像的情况下,光电侦察吊舱可实现其全俯仰角度范围和一定角速度(采用红外热像仪时,光电侦察吊舱推扫角速度≤4.3°/s;采用可见光摄像机时,光电侦察吊舱推扫角速度≤9.42°/s)进行广域搜索,且能成像清晰。
4 对海搜索范围模型
直升机的飞行空域、飞行方式、机动方式、飞行高度、飞行距离、光电侦察吊舱的视轴指向等统称为直升机的“空间状态”。对于给定的光电侦察吊舱,“空间状态”对搜索发现目标具有决定性的影响。直升机的搜索方式是由“空间状态”决定的,不同搜索方式其搜索范围不同,不同的搜扫范围具有不同的搜扫效率。
4.1 基本假设
1)直升机定高匀速直线飞行;
2)光电侦察吊舱广域搜索采用最基本的两种推扫方式:第一种与直升机航向垂直前向横扫,第二种与直升机航向一致侧向推扫。
3)光电侦察吊舱推扫过程中清晰成像。
4.2 模型建立
设定直升机飞行的速度和飞行的高度;光电侦察吊舱俯仰角度;光电传感器的视场为×,扫描梯形中心宽度为,扫描面积为,那么推扫单帧覆盖的面积,按照参考文献[2]如图3所示。
4.3 推扫侦察覆盖面积计算
1)第一种情况与直升机航向垂直前向横扫方式
设定直升机飞行高度为3km,飞行的速度为50km/h(约为14m/s);红外热像仪处于宽视场(16.5°×13.3°)成像;方位方向推扫的角度范围为±90°,推扫角速度为4.3°/s;直升机航向和垂直航向两个方向的图像重叠率≥20%的条件下,进行覆盖面积的计算。

表3 红外热像仪的视场、直升机的飞行速度和吊舱的俯仰角度关系表

图3 推扫单帧覆盖的面积示意图
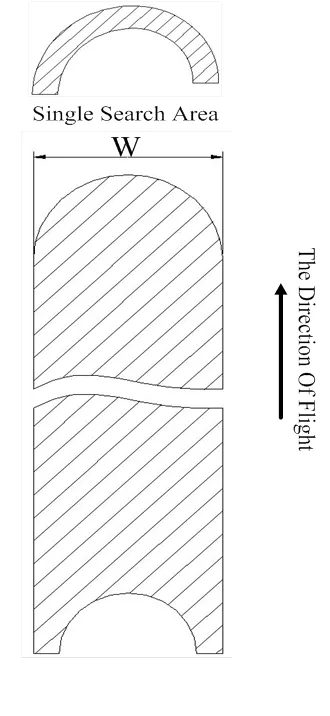
图4 连续推扫搜索示意图
2)第二种情况与直升机航向一致侧向推扫方式
设定直升机飞行高度为3km,飞行的速度为50km/h(约为14m/s);红外热像仪处于宽视场(16.5°×13.3°)成像;光电侦察吊舱方位设定角度为90°,俯仰方向推扫的角度范围为+90°~+10°(即直升机航向前后摆扫,摆扫的单帧区域为梯形),推扫角速度为4.3°/s;直升机航向和垂直航向的图像重叠率≥20%的条件下,进行覆盖面积的计算。
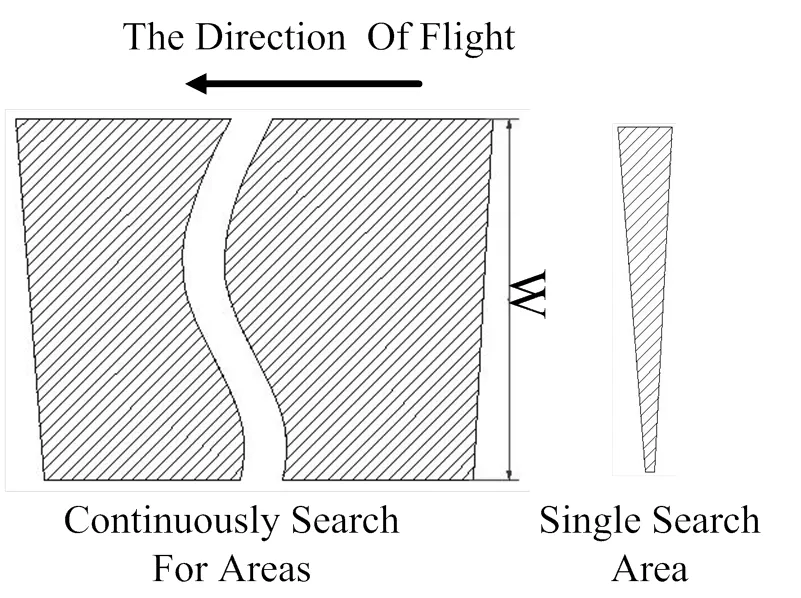
图5 侧方搜索区域示意图
5 图像无缝拼接思路
5.1 初步拼接
假设可见光摄像机的帧频,光电转塔方位扫描速度。当光电转塔每次推扫到达角度后,给后端图像处理发送标识位,当后端图像处理收到标识后,即可以利用光电转塔方位旋转的角度计算出相邻两帧图像的位移D,则图像拼接示意图,如图6所示。
5.2 基于特征点的拼接
完成图像基于光电转塔方位角度的配准之后,即可以在图像的公共区域提取特征点,完成基于特征点的精配准,基于特征点的拼接流程图,按照参考文献[5]如图7所示。
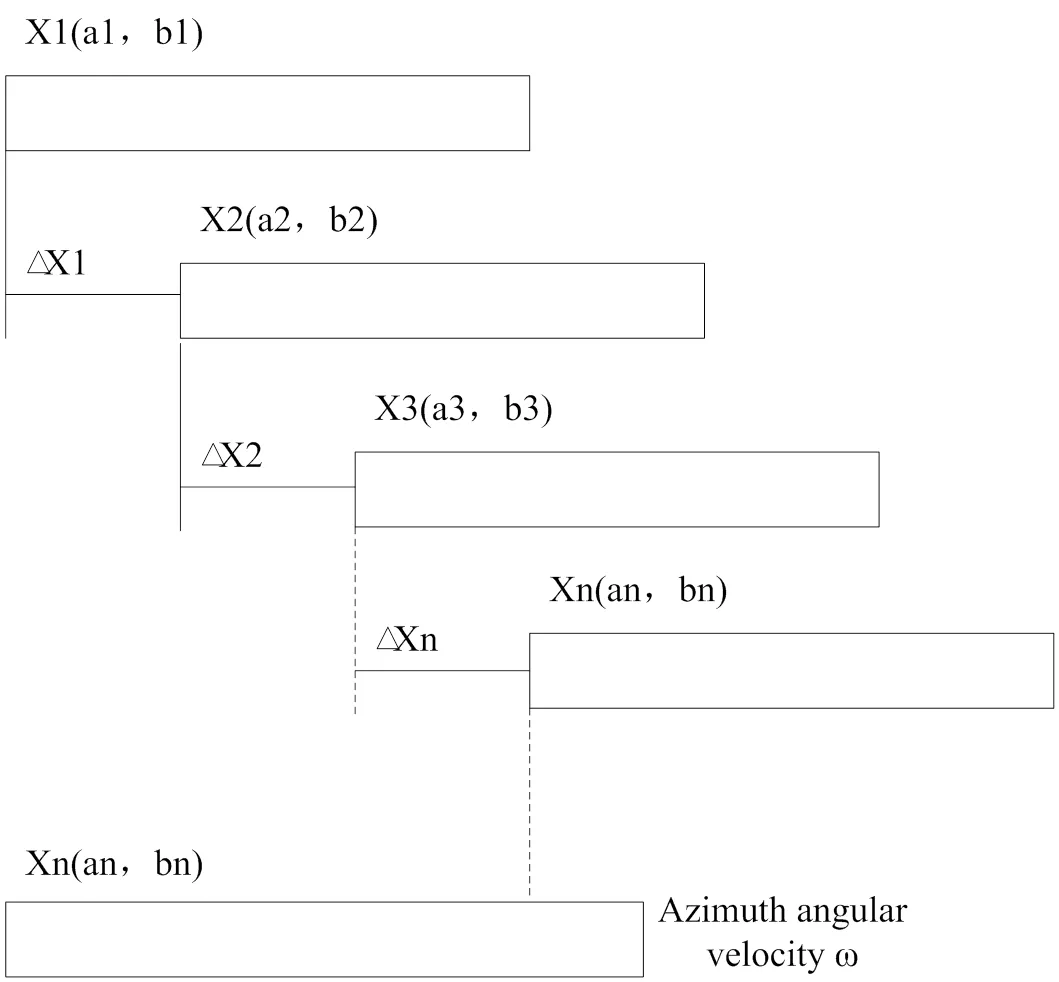
图6 基于光电转塔方位角度的图像拼接示意图

图7 基于特征点的图像拼接流程
5.3 图像预处理
图像预处理主要包括图像几何畸变校正和图像去噪。首先因为严重的几何畸变会导致两幅图像中相同的物体变得不匹配,使图像配准失效,所以必须进行校正。最后噪声的存在会影响图像配准过程中特征的提取和相似度计算,也需要加以抑制。图像预处理是图像配准的准备工作,通过预处理可使图像质量满足图像配准的要求,提高配准过程的效率。
5.4 图像配准
1)特征空间的选择:特征空间指的是从参考图像和待拼接图像中提取的可用于配准的特征。可以是图像像素灰度,也可以是边缘、角点、高曲率点等图像特征,还可以是不变矩、重心等。
2)搜索空间的选择:搜索空间指的是在配准过程中对图像进行变换的范围和变换的方式。图像的变换范围分为全局的、局部的和位移场的三类。全局变换指整幅图像的空间变换都可以用相同的变换参数表示;局部变换指在图像的不同区域采用不同的变换参数;位移场变换指对图像中的每一个像素都独立进行参数变换。图像的变换方式包括线性变换和非线性变换。线性变换可分为刚体变换、仿射变化和投影变化;非线性变换一般指多项式变换。
3)相似性测度的选择:相似性测度是衡量每次变换结果优劣的准则,用来对变换结果进行评估,为搜索策略的下一步动作提供依据。常用的相似性测度有互信息、互相关、联合熵、欧氏距离等。
4)搜索策略的选择:搜索策略的任务是以相似性测度作为依据,在搜索空间中找到最优的配准参数。常用的搜索策略有黄金分割法、抛物线法、梯度下降法、牛顿法、遗传算法等。
图像拼接结果如图8所示。

图8 基于特征点的图像拼接的实验结果
6 结论
本文基于直升机及其配装的光电侦察吊舱的性能参数,并结合直升机速高比、光电侦察吊舱搜索的角速度和成像传感器的视场,分析计算了光电侦察吊舱俯仰方向角度大小。文中也对两种对海广域搜索方式和搜索范围进行了分析,并建立了光电侦察吊舱搜索计算模型,和两种基本搜索区域单位覆盖面积计算;同时介绍了针对扫描搜索区域图像拼接的处理方法,为计算其搜索效率以及研究搜索力的配置和搜索目标奠定了基础。
[1] 李承选, 朱斌. 国外舰载红外搜索跟踪系统[J]. 国防科技, 2005(8): 38-41.
LI Chengxuan, ZHU Bin. Ship-borne infrared search and tracking system abroad[J]., 2005(8): 38-41.
[2] 谭安胜, 贺凯, 郭江龙. 舰载无人机光电载荷对海搜索方式与搜索宽度[J]. 指挥控制与仿真, 2011(6): 32-33.
TAN Ansheng, HE Kai, GUO Jianglong.The Search Method and Search Width of Optical Payload of Ship-borne UAV for Sea Target[J]., 2011(6): 32-33.
[3] 谭安胜. 舰载无人机光电载荷对海上目标搜索决策分析[J]. 指挥控制与仿真, 2010(4): 22-32.
TAN Ansheng. The analysis of Ship-borne UAV’s photoelectric load to the sea target search decision[J]., 2010(4): 22-32.
[4] 谭安胜, 叶丹, 赵金强. 驱护舰编队对潜防御效率与决策分析[J]. 军事运筹与系统工程, 2006(4): 65-69.
TAN Ansheng, YE Dan, ZHAO Jinqiang. Analysis of submarine defense efficiency and decision-making by escort fleets[J]., 2006(4): 65-69.
[5] 苏宇. 基于特征点的图像拼接技术研究[D]. 西安: 西安电子科技大学, 2008.
SU Yu. Research on Image Mosaic Based on Feature Points[D]. Xi’an: Xi’an University of Electronic Science and Technology, 2008.
Searching Method of the Wide Area of Optical Recon Pod for Sea Targets
FANG Xibo
(CAMA (LuoYang) Measurements & Controls Co,Ltd, Louyang 471009, China)
The search efficiency of a sea target helicopter can be studied based on the searching method and search width of the optical recon pod of the helicopter. According to the characteristic performance of the optical recon pod and helicopter,two basic methods of searching and covering square are proposed for the helicopter to search the sea target. According to the developed search covering square,the commander can determine how to configure the recourses to attain the optimal efficiency. In addition, the processing method for image stitching for the scanned search area is introduced to identify the target of interest in the easy search area.
optical recon pod,servo control,image stitching
TN965
A
1001-8891(2021)11-1055-06
2018-6-19;
2018-6-28.
方喜波(1978-),男,湖北新洲人,硕士,高级工程师,主要研究方向为红外成像、光电系统等。E-mail: fangxbrww@163.com。
