基于磁场矢量相位差的多传感器定位技术研究
2021-11-26陈雅娟周子健李清华谢阳光张一博
陈雅娟 周子健 李清华 谢阳光 张一博
摘要:磁信标定位系统展现出的强穿透性、低功耗、低延迟等特点,使其在复杂环境定位领域具有非常大的应用潜力。同时,磁信标定位系统还面临一些挑战,如磁场的快速衰减导致的信号信噪比降低、定位精度下降以及覆盖区域有限、复杂环境下信号可能出现畸变以及在测距时需要磁矩等先验信息的问题。针对上述问题,本文提出了一种基于多传感器的正交旋转磁信标定位算法,并对低信噪比磁场信号的提取与参数辨识算法展开了研究。首先借助磁场矢量之间相位差的表达式求解出稳定的相对俯仰角信息,然后利用多个传感器之间的位置约束求解出目标点的相对方位。与传统磁信标定位系统相比,避免了使用磁矩等先验信息。试验结果显示,不使用磁矩等先验信息的情况下,在信噪比环境为-8dB的环境中,本算法解算得到的最大定位误差为0.23m,平均定位误差为0.09m,定位结果良好。
关键词:磁场定位;弱磁信号;多传感器定位;相位差
中图分类号:V249.3文献标识码:ADOI:10.19452/j.issn1007-5453.2021.10.012
基金项目:航空科学基金(20175877011)
受室内或地下等环境下导航定位需求的推动,复杂环境下导航定位技术的相关研究越来越丰富。但是复杂环境中有天花板、墙壁、混凝土等会阻碍和扭曲高频信号传输的物体,使得大部分定位技术无法发挥作用[1-3],如传声器[4]和雷达[5-6]需要视距来进行有效操作;超宽带(ultra wide band,UWB)定位技术由于多径效应会导致定位性能下降。与其他系统相比,低频磁信标定位系统能够在非视距条件下工作,其信号具有良好的穿透性,可以穿透地面或建筑物,适合在复杂环境下提供定位服务;同时,低频磁信标定位系统具有较高的更新速率和较低的延迟,且不存在多径效应[7-10]。
低频磁信标定位系统在部分领域的应用中取得了较好的效果。汉诺威应用技术大学提出了结合小功率磁通门和惯性传感器进行三维位置和姿态估计的新方法,利用传感器之间的固定空间关系解决单个线圈定位时产生的模糊问题,但是方法存在线圈磁场分布不均匀以及需要磁信标磁矩先验信息等问题[11]。密歇根大学提出了一种基于磁通门和位置已知的磁信标阵列的室内导航方法,通过检测并识别距离最近的磁信标频率进行定位[12]。牛津大学分析了不同材料对极低频磁场和低频磁场的影响,并发现在近场区域内简单的磁偶极子模型仍可在大多数地下场景中使用[13]。中国科学院大学提出了一种基于标量三角测量和测距信息的校准方法,能够快速校准测量误差并提高定位的精度,但是使用的是静态磁信标,不易与周围磁场干扰分离[14]。同时,中国科学院大学也研究了非零梯度磁场中的磁梯度阵列误差模型,利用磁场梯度张量和相应的旋转张量不变性得到磁信标定位系统的校准参数来补偿传感器,但仍然存在一些残差误差[15]。空军工程大学提出了一种基于磁梯度张量的旋转永磁体三维定位技术,利用旋转永磁体产生的正弦磁场信号峰值建立磁张量矩阵来进行定位解算,但需要对其峰值进行符号判断[16]。
低频磁信标定位系统在复杂环境定位领域具有较大潜力,但是它還存在一些挑战,如磁场的快速衰减会导致磁信号信噪比降低,从而降低了定位精度,限制了定位的有效区域[17]。为了解决信号畸变以及先验信息造成的影响,本文提出了一种基于磁场矢量相位差的多传感器定位算法,并对低信噪比磁场信号的提取与参数辨识算法展开了相关研究。试验结果表明,当目标处的磁场信号信噪比处于-8dB的环境时,相对俯仰角的最大误差为0.16°,最大定位误差为0.23m,能够较好地降低复杂环境下的磁场干扰,得到较好的定位结果。
1多传感器定位技术
磁信标由两个正交螺线管组成,分别对两个螺线管输入幅值频率相同、相位差为90°的正弦电流,在空间中产生低频旋转磁场,接收信号端采用三轴磁通门。磁信标定位算法主要包括信号接收模块、信号处理模块和定位解算模块三个主要部分。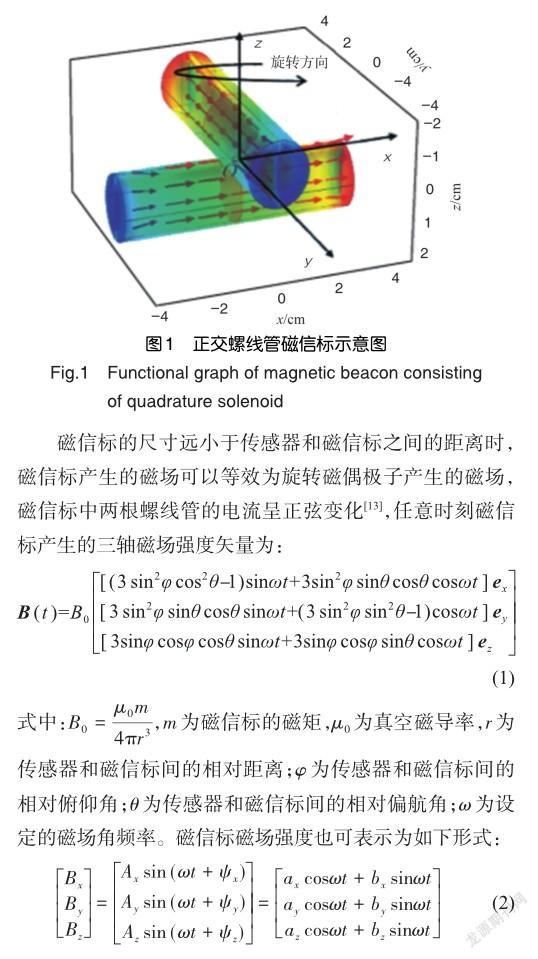

同样得到相对俯仰角的解为φ、(90°-φ)。将该解与根据相位差γxz、γzy得到的解相比较,可以减少不确定解的个数,确定相对俯仰角φ的数值解。其中,通过相位差法得到的解不包括3sin2φ- 1 = 0时,此时的相对俯仰角可通过计算Data的值补充确定,即Data = 1/2时,φ= 35.264°。
由文献[17]可知,试验过程中通过传感器数据计算的相对偏航角误差较大。为了提高定位精度,算法选择稳定的相对俯仰角来进行定位解算。由于磁矩等先验信息存在误差,为了提高定位精度,可以在空间中布置多个传感器,共同参与对信标的定位解算,根据每个传感器的相对俯仰角信息和位置信息解算出目标点的位置。传感器个数至少为三个,其位置部署如图2所示。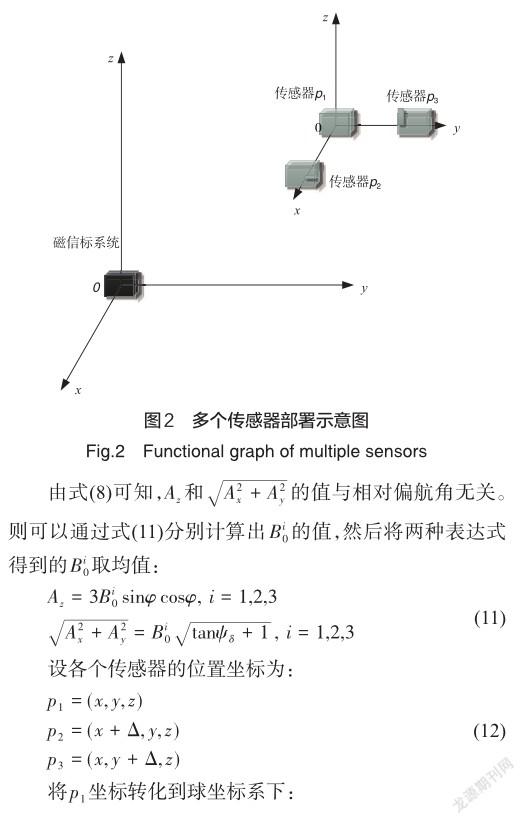


为了进一步提高弱磁信号提取的准确性,可以将信号进行分段处理,利用短数据中磁信号强相关而噪声不相关的性质,对分段处理后的短数据进行时域相干累积处理,在分段数据相干累积后再采用自适应谱线增强的方法来提取有效信号。
3基于多傳感器的磁信标定位算法试验
为了验证基于多传感器的单磁信标定位算法的可行性,进行磁信标系统定位试验,如图3所示。将磁信标的中心位置设为定位坐标系的原点,固定长桌不动,由于长桌的高度有限,为了验证此算法对低信噪比磁场信号的可行性,将通入的电流幅值设定为0.5A,频率为10Hz,传感器间的间隔为0.2m。测量得到传感器在第一个卡槽中的初始中心位置为(2.31m,2.14m,0.97m)。在初始点进行数据采集后得到其频谱分析图,如图4所示。信号的信噪比为-8dB,然后依次将传感器沿x轴和y轴移动一个位置。
根据采集到的数据可以得到目标位置的相对距离和方向。根据相位差法得到相对俯仰角的误差曲线如图5所示,相对俯仰角的最大误差为0.16°,平均误差为0.06°,证明本文算法能够达到1°以内的定位精度。传感器真实位置与定位解算位置如图6所示,利用多传感器定位算法得到的最大定位误差为0.23m,平均定位误差为0.09m。
4结论
本文首先介绍了两种关于相对俯仰角的闭合表达式,用于计算相对俯仰角。通过式(7)和式(10)可以减少不确定解的个数,从而确定相对俯仰角的解。然后利用多个传感器之间的位置约束,可以解算出目标点的相对距离和相对偏航角。同时,本文提出了基于谐波小波和自适应谱线增强滤波器的算法,可以在低信噪比条件下进行有效磁场信号的辨识和提取。试验证明,当目标处的磁场信号信噪比处于-8dB的环境时,相对俯仰角的最大误差为0.16°,最大定位误差为0.23m,能够较好地减少复杂环境下的磁场干扰,得到令人满意的定位结果。
参考文献
[1]Sridharan M,Bodanese E,Bigham J. Collaborative location estimation for confined spaces using magnetic field and inverse beacon positioning[C]// 2017 IEEE SENSORS,2017:1-3.
[2]Hehn M,Sippel E,Carlowitz C,et al. High-accuracy localization and calibration for 5-DoF indoor magnetic positioning systems[J]. IEEE Transactions on Instrumentation and Measurement,2019,68(10):4135-4145.
[3]Burch H C,Garraud A,Mitchell M F,et al. Experimental generation of ELF radio signals using a rotating magnet[J]. IEEE Transactions on Antennas and Propagation,2018,66(11):6265-6272.
[4]贺谦,韩凯,冯建民.基于任意布设传声器的飞机强度试验声源定位方法[J].航空科学技术,2020,31(12):55-60. He Qian, Han Kai, Feng Jianmin. Sound source localization method for aircraft structural test with random microphone array[J]. Aeronautical Science & Technology,2020,31(12):55-60.(in Chinese)
[5]宋婷,贺丰收,程宇峰.深度学习技术在雷达目标检测中的研究进展[J].航空科学技术,2020,31(10):12-20. Song Ting, He Fengshou, Cheng Yufeng. Research progress of deep learning technology in radar target detection[J]. Aeronautical Science & Technology, 2020,31(10):12-20. (in Chinese)
[6]杨美娟,李文龙.基于极化敏感阵列的加权融合测角方法[J].航空科学技术,2021,32(3):29-33. Yang Meijuan, Li Wenlong. Weighted fusion angle measurement method based on polarization sensitive array[J]. Aeronautical Science & Technology, 2021,32(3):29-33. (in Chinese)
[7]Wahlstr?m J,Kok M,Gusm?o P P B,et al. Sensor fusion for magneto-inductive navigation[J]. IEEE Sensors Journal,2019,20(1):386-396.
[8]Tadayon P,Staude G,Felderhoff T,et al. Wearable magnetic field based 3D-orientation and -position acquisition[C]// GLOBECOM 2020—2020 IEEE Global Communications Conference,2020:1-6.
[9]Fan L M,Kang X Y,Zheng Q,et al. A fast linear algorithm for magnetic dipole localization using total magnetic field gradient[J]. IEEE Sensors Journal,2017,18(3):1032-1038.
[10]Han Q Y,Han S L. Research on the improvement of target localization method based on magnetometers array[C]// 12th IEEE International Conference on Electronic Measure-ment & Instruments(ICEMI),2015.
[11]Tadayon P,Felderhoff T,Knopp A,et al. Fusion of inertial and magnetic sensors for 3D position and orientation estimation[C]// 38th Annual International Conference of the IEEE Engineering in Medicine and Biology Society(EMBC),2016.
[12]Sheinker R,Ginzburg B,Salomonski N,et al. A method for indoornavigationbasedonmagneticbeaconsusing smartphones and tablets[J]. Measurement,2016,81:197-209.
[13]Abrudan T E,Kypris O,Trigoni N,et al. Impact of rocks and minerals on underground magneto-inductive communication and localization[J]. IEEEAccess,2016,4:3999-4010.
[14]Chen W,Qu X D,Zhang X J,et al. A fast calibration method for magnetometer array and the application of ferromagnetic target localization[J]. IEEE Transactions on Instrumentation and Measurement,2017,66(7):1743-1750.
[15]Mu Y X,Wang C,Zhang X J,et al. A novel calibration method for magnetometer array in nonuniform background field[J].IEEETransactionsonInstrumentationand Measurement,2019,68(10):3677-3685.
[16]王潤,杨宾峰,孙欢,等.基于磁梯度张量的旋转永磁体定位技术[J].系统工程与电子技术,2020,42(9):2085-2090. Wang Run, Yang Binfeng, Sun Huan, et al. Rotating permanent magnet positioning technology based on magnetic gradient tensor[J]. System Engineering and Electronics, 2020, 42(9): 2085-2090.(in Chinese)
[17]王煜.基于特征矢量的磁信标定位技术[D].哈尔滨:哈尔滨工业大学,2019. Wang Yu. Magnetic-beacon localization technology based on feature vector[D]. Harbin: Harbin Institute of Technology, 2019.(in Chinese)
Research on Multi-sensor Positioning Technology Based on Phase Difference of Magnetic Field Vector
Chen Yajuan1,Zhou Zijian1,Li Qinghua1,Xie Yangguang2,Zhang Yibo2
1. School of Aeronautics,Harbin Institute of Technology,Harbin 150006,China
2. AVIC Flight Automatic Control Research Institute,Xian 710065,China
Abstract: Magnetic beacon positioning systems have strong application penetration, low power consumption, low delay and other characteristics, so they have great potential in complex environment positioning. At the same time, there are still some challenges, such as the reduction of signal-to-noise ratio, the decline of positioning accuracy and the limited coverage area which are caused by the rapid reduction of magnetic field. There are also signal distortion in complex environment and the need for prior information such as magnetic moment. In order to solve the problems above, this paper proposes a positioning algorithm based on multi-sensor and orthogonal rotating magnetic beacon, and studies the low signal-to-noise ratio magnetic signal extraction and parameter identification algorithm. Firstly, the expression of phase difference among magnetic field vectors is used to obtain the stable relative pitch angle. Then the position constraint between multiple sensors is used to obtain the relative position of the target point. Compared with the traditional magnetic beacon positioning system, this paper avoids using prior information such as magnetic moment. The test results show that without using prior information such as magnetic moment, in an environment with a signal-to-noise ratio of -8dB, the maximum positioning error calculated by this algorithm is 0.23m, and the average positioning error is 0.09m, which shows good positioning result.
Key Words: magnetic field positioning; weak magnetic signal; multi-sensor positioning; phase difference
