基于视觉识别技术的医药品智能识别方法设计
2021-11-24倪秉轩袁鹏凯张庆旭陈学琪
倪秉轩 袁鹏凯 张庆旭 陈学琪
摘要:在医药,食品,3C行业存在着大量轻小物料分拣存取的作业环境。为避免传统用人方式中效率低下,用工难,成本高等问题,团队主要针对于医疗用品及药品分拣和发放设计出医药品智能分发机器人,机器人以STM32F103为主控芯片,运用机械臂在配合视觉识别的基础上完成传送带上杂乱无章产品的快速分拣,搬运等环节,替代现场人工大量重复性劳动。设备端的MCU内置蓝牙串口和WiFi模块,可实现远程操作、实时监控。
关键词:STM32;视觉识别;机器人
1 引言
当今社会就医面临的突出矛盾和困难主要为“看病难”,由于优质医疗资源相对于居民需求的不足,造成患者去大医院看专家“难”。突出表现为许多人看小伤小病也涌到大医院,大医院人满为患。这形成了就医等待时间长,看病困难的局面。在医院药房取药时,人工操作需要医护人员大量的时间及精力用于对患者的药物药品的分拣与发放。为提升基层医疗资源配置和服务能力,降低群众就医成本;规范医疗用品及药品的分拣和发放,合理运用医院人力资源;减少人员密集接触,减少患者在医院停留时间。设计基于视觉识别技术的医药品智能机器人,应用基于视觉识别技术的医药品智能识别方法,从减少医疗物资存取时间为切入点,解放医院工作者劳动力,提供更多灵活性、提升成本效益,进而改善就医环境、就医效率,帮助改善“看病难”现状。
设计也适用于小型快递网点、仓库等轻小物料分拣存取的工作环境。可解决生活中的难题,为大众带来便利,并结合新常态下产业转型升级,顺应当今产业发展由粗放型向集约型转变的洪流趋势,为经济可持续发展贡献力量。
2.系统总体设计
机器人存在的意义就是为人服务,其具备工具、经济、技术、社会属性。随着运行、使用成本高等难题的解决,人工智能与机器人的融合正成为新趋势。然而国内机器人产业发展包括研发试验、机器人本体和零部件产业化、系统集成技术等每一个产业从整体来看,产品以低端为主,我国大部分机器人企业目前集中在集成领域,加工组装企业占多数,国产六轴工业机器人占全国工业机器人新装机量不足10%;在核心及关键技术的原创性研究、高可靠性基础功能部件、系统工艺应用解决方案以及主机批量生产等方面,距发达国家还有相当大的差距。
医药品智能分发机器人项目的研究根据市面上的分拣机器人为对照,从造价及操作方式等方面进行改进,我们的医药品智能分拣系统能够准确地将药物识别并将其存放或取出于准确位置,控制系统通过选择基础单元元件来完成系统程序的初始化,机械关节的转动、网上实时监视与控制,出色地完成操作人员指定任务要求,其本身有价格低廉、性价比高、体积小、易操作、普适性强等特点。
智能医药分拣机器人在软件和硬件上均采用模块化设计,根本是由主控模块、图像采集模块、电机驱动模块、电源稳压模块、机械臂模块组成。
3.硬件设计与完成
3.1核心控制模块
STM32F103 ARM最小系统:STM32F103芯片是由ST(意法半导体)公司推出的一种ARM芯片,其内核是ARM 32位的Cortex-M3,其内核最高72MHz工作频率。闪存程序存储器从16K到512K字节的,SRAM最大64K字节。STM32F103 ARM最小系统主要是由晶振电路、复位电路和电源电路组成。
在使用STM32和机械臂通讯时,其实就是控制舵机,给舵机输入PWM信号,来控制其旋转到不同的角度。PWM是一种对模拟信号电平进行数字编码的方法,通过高分辨率计数器的使用,方波的占空比被调制用来对一个具体模拟信号的电平进行编码。PWM 信号是数字的,因为在给定的任何时刻,满幅值的直流供电要么完全有(ON),要么完全无(OFF)。电压或电流是以一种通或断的重复脉冲序列被加到模拟负载上去的。通的时候即是直流供电被加载到负载上的时候,断的时候即是供电被断开的时候。所以只要带宽足够,我们就可以使用PWM进行编码。想要输出PWM信号就得用上TIM定时器,而基本定时器没有PWM信号的输出功能,所以只能选用通用定时器和高级定时器。以通用定时器为切入口,除了基本的定時器的功能外,还具有测量输入信号的脉冲长度( 输入捕获) 或者产生输出波形( 输出比较和PWM),通用定时器的时钟来源有:内部时钟(CK_INT)、外部时钟模式1:外部输入脚(TIx)、外部时钟模式2:外部触发输入(ETR)、内部触发输入(ITRx):也就是使用一个定时器作为另一个定时器的预分频器。我们可以通过“‘开启该外设的时钟’、‘配置初始化结构体(如果有对应的GPIO还需要初始化该GPIO)’、‘调用结构体初始化函数’”的方式输出PWM信号编码所需模拟值达到控制机械臂的目的。
3.2视觉识别模块设计
运用视觉识别技术识别各种已有药物药品,根据指令通过机器人进行自动分析及分类。视觉识别采用MaixBit开发板,采用的芯片是k210。它的内核主要采用的是RISC-V Dual Core 64bitwith FPU,其主频为400MHz。静态处理器选用的是内置的8MByte。在图像识别模块,用到的是QVGA@60fps/VGA@30fps添加语音模块,语音识别用到的是麦克风阵列(8mics)。可以通过视觉摄像头拍摄到药物药品的图像,识别后通过信息处理,再通过通信口进行视觉传感器和STM32之间的通信,将信息传输给STM32。通过设置指令进行通讯,再通过指令进行数据的传输,接传输指令后STM32极速进行内部识别判断,准确对指令进行数据传输,通过 STM32与机械臂通信,将正确的所需的药物药品进行分拣拾取。药物药品可以根据种类存放在相应的存储空间或根据处方将药物药品发放到患者手中。还可以用视觉系统识别医疗用品,如手术刀、纱布、剪子等。
4.视觉识别算法设计
4.1识别底层算法
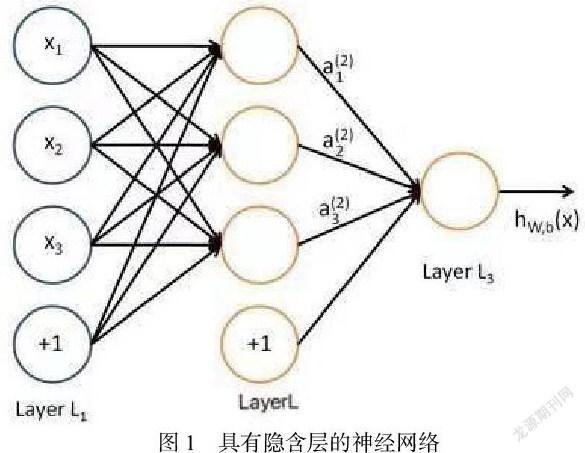
每一个底层单元也可以被称作是Logistic回归模型。当将多个单元组合起来并具有分层结构时,就形成了神经网络模型。如图1展示了一个具有一个隐含层的神经网络。
在图像处理时,往往把图像表示为像素的向量,比如一个1000×1000的图像,可以表示为一个1000000的向量。在上一节中提到的神经网络中,如果隐含层数目与输入层一样,即也是1000000时,那么输入层到隐含层的参数数据为1000000×1000000=10^12。所以图像处理要神经网络必先减少参数加快速度。
在局部连接中,每个神经元都对应100个参数,一共1000000个神经元,如果这1000000个神经元的100个参数都是相等的,那么参数数目就变为100。将这100个参数(也就是卷积操作)看成是提取特征的方式,该方式与位置无关。这其中隐含的原理则是:图像的一部分的统计特性与其他部分是一样的。所以对于这个图像上的所有位置,都能使用同样的学习特征。
4.2 控制算法设计
系统核心处理器选择的是STM32的F103系列芯片。视觉识别模块和STM32通信时,收发控制器根据寄存器配置,对数据存储转移部分的移位寄存器进行控制。当需要发送数据时,内核或DMA外设把数据从内存(变量)写入到发送数据寄存器TDR后,发送控制器将自动把数据从TDR加载到发送移位寄存器,然后通过串口线TX,把数据一位一位地发送出去。对于K210芯片的训练,使用MixHub平台进行训练,需要做的是目标检测,并给出物体的具体位置信息。
5 結论
设计STM32F103 ARM芯片设计医药品智能识别控制系统,研究和应用基于视觉识别技术的医药品智能识别方法。系统采用模块化设计,每个功能使用相应功能模块电路,安装调试方便。系统性能稳定,抗干扰能力强,搬运物品方便快捷。机械臂自动分拣系统的出现极大地解放人的双手,机械装置能够替代人员去从事绝大部分繁重,重复性劳动,在保证货物质量的情况下,大幅度提高工作效率。
随着现代科学技术蒸蒸日上的发展和相关技术理论在面向对象过程中得到的实践,机械臂操作系统技术方面的研究也得到了不断的创新,并将为社会创造巨大的财富。
参考文献:
[1]何惜琴.以技能竞赛引领电子专业教学改革研究[J].信息系统工程,2020(11)
[2]户硕.搬运机器人的设计与制作[J].煤矿机械,2015(8)
[3]纪利琴,王健,熊伟.基于蓝牙模块的单片机双机通信的实现[J].科技视界,2019(19)
[4]黄树琳,张锋.基于视觉识别的物料分拣机器人设计[J].自动化与仪表,2019,34(11)
基金项目:国家级大学生创新创业训练计划项目“医药品智能分发机器人”(项目号:202110066024)
作者简介:倪秉轩(2001-),男,本科生,自动化(电气技术教育方向)专业。
