三维激光扫描技术在危旧桥梁健康监测中的应用研究
2021-11-23尹恒王立娟裴尼松姜丽丽刘欢
尹恒,王立娟,裴尼松,姜丽丽,刘欢
(1.四川省安全科学技术研究院,四川 成都 610045;2.重大危险源测控四川省重点实验室;3.四川顺荣建筑工程有限公司)
1 前言
GPS测量、全站仪及电子水准仪技术是现阶段桥梁工程测量和监测的三大核心技术,这3种方法的原理、精度具有天生局限,如受天气等外界条件影响大、需要通视、操作繁琐等,因此决定了其在桥梁健康监测中的适用范围较小;桥面病害无损检测技术有半电池电位法、探地雷达法、冲击回波法、红外热成像法等,目前存在主观性高、耗时长和引起交通堵塞,检测结果信息有限且不能做到定期和实时检测,检测准确率有待提高等多类问题;针对伸缩缝变化检测,有学者研究了采用CCD拍摄下伸缩缝的影像,而后利用图像相关法进行宽度变化分析,其分析精度受相机畸变、光源和桥梁振动的影响较大;以人工目测为主的外观损伤检测,存在工作强度大、效率低、借助支架和检测车才能接近结构面,人员专业要求高的缺点。新建桥梁为保证建设和运营期的安全,一般同步建设包含桥址环境、外部作用、结构安全性和特殊部位等内容的桥梁健康监测系统,但安装设备较多导致建设费用偏高。据统计,截至2011年中小桥数量占中国桥梁总数的90%以上,2010年国省县道危桥18 689座;20世纪90年代及以前修建的桥梁约占总数的40%,一般桥梁建成投入使用后20~30年为病害集中爆发期。因此,如何针对大量危旧桥梁建立经济适用、高效率、客观性强的桥梁健康监测技术成为亟待解决的问题。
近年来三维激光扫描技术迅猛发展,因其高精度、高速率、高密度、非接触和多源数据融合的特性,在文物、矿山、隧道、建筑等领域应用成效越发明显。也有学者开始将其应用于桥梁领域,如B.Riveiro描述了一种基于地面三维激光扫描仪获取桥梁真实三维几何模型的方法,并将其用于结构分析;J.Valença结合图像处理和地面激光扫描技术,提出了一种称作MCrack-TLS的新方法来自动提取混凝土桥梁裂缝;Hao Yang等利用三维激光进行了桥梁变形监测和表面建模,结果表明表面模型精度与混凝土粗糙度有关,但可以通过优化提取和点云过滤提高精度;已有很多学者基于三维激光点云数据,进行建筑物、工业设备的轮廓图、平立面图绘制,常用方法有:① 利用三角网或NURBS曲面建立扫描对象的三维网格,而后通过剖切网格形成平立面图;② 在点云数据上人工采集足够轮廓点,然后绘制立面图;③ 通过点云模型,制作正射投影图,然后人工勾绘边界形成轮廓图,但这些方法存在勾勒不准确、表面失真和点选错位等缺陷。目前公开报道中,三维激光扫描技术在桥梁健康监测中的应用还较少,未制定成熟可靠的技术方法或规程。
为加强危旧桥梁检测并保障桥梁健康安全运行,该文以四川省成都市大邑县虎跳河大桥为例,研究三维激光扫描技术在桥梁的二维图件绘制、病害检测和变形分析等健康监测方向的应用,提供一种无损、三维、可视、数字化的技术方案,为桥梁管养技术提供有效补充,保障桥梁安全运行。
2 虎跳河大桥概况
虎跳河大桥位于四川省成都市大邑县新场镇虎跳村,东经103°22′5.55″,北纬30°32′57.91″,是县道安(安仁镇)出(出江镇)路的控制性桥梁,跨越岷江支流西河。大桥于1982年建成通车,桥梁结构形式为2×40 m的混凝土肋拱桥,桥面宽度8.4 m,桥梁净矢高5 m,主拱圈截面高120 cm,宽2 m,设计荷载为汽车-13级。大桥处于中国南北地震带上,历史上周边区域地震多发,近十多年就有汶川Ms8.0地震、芦山Ms7.0级地震、九寨沟Ms7.0级地震等3场强震事件;加上社会发展导致车辆荷载及通行频率的增加,极端天气下洪水对桥墩桥台冲刷严重,桥梁结构发生损伤与劣化,影响行车安全。
3 数据采集与处理方法
3.1 使用仪器简介
Z+F IMAGER 5010C是德国Zoller+Frohlich公司生产的一款基于相位式测距原理的三维激光扫描仪,测距范围为0.3~187.3 m,线性误差≤1 mm,分辨率为0.1 mm,角度精度为0.007°,根据扫描质量和角度分辨率2个参数组合,共设置了21种扫描模式,最高扫描速度可达1.016×106pts/s。采用的全站仪为Leica Nova TM 50,测角精度为0.5″,测距精度为0.6 mm+1 ppm。
3.2 数据采集
桥梁三维激光扫描的流程分为现场踏勘、控制测量和实施扫描3个步骤。
3.2.1 现场踏勘
查看桥梁周边地形地质条件,选择通视、稳定、不宜破坏的地点用作控制点埋设;调研桥梁主要病害类型、病害位置、程度与规模,据此设计扫描参数和站点,控制扫描精度水平。绘制包含扫描对象、控制点布设、扫描站位置的现场草图,为后续数据处理准备。
3.2.2 控制测量
为保证位移监测的准确性,在虎跳河大桥的上下游和左右岸,共布设了3个带基桩和强制对中盘的控制点(图1),平面控制测量按三角形网二等精度要求,高程控制测量按二等水准精度要求,采用独立平面和高程坐标系,建立桥梁的控制网。经观测和平差后,控制点坐标见表1。
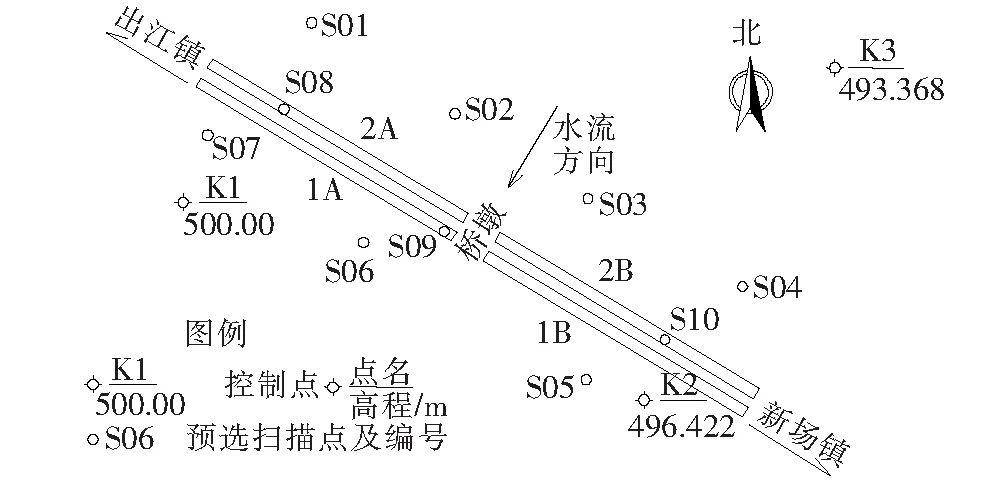
图1 控制点布设及拱肋编号示意图
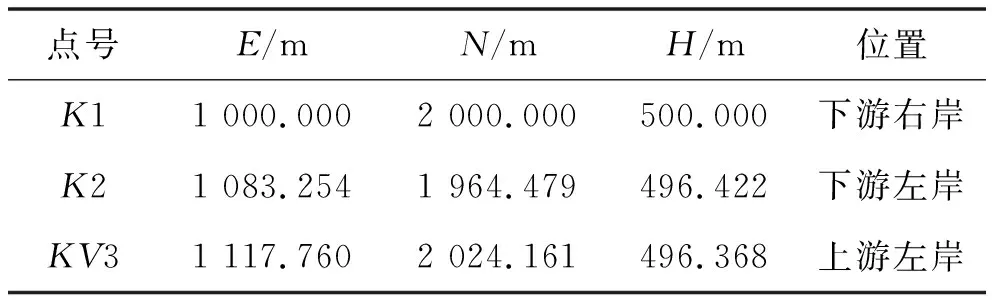
表1 控制测量成果
3.2.3 实施扫描
预选10个扫描站点(图 1),实际扫描过程中,根据现场河水、河床、植被和通行条件等适当增减;在扫描距离范围内,按不同距离、高度布设4~8个靶标,相邻两个扫描站点间,尽量保证有3个靶标重叠;用全站仪测量靶标中心点;以适当的高度架设扫描仪,采用Superhigh-High模式进行360°全景扫描;扫描中不宜在脚架周边走动,注意是否有人或车辆遮挡扫描仪,记录靶标与扫描站间关系;扫描后观察点云完整程度,是否需要补扫或重复扫描。重复上述步骤,直至完成整座桥梁的扫描。于6月19日完成汛期前的第一次扫描,共扫描16站;11月2日,完成汛期后的第二次扫描,共扫描12站。
3.3 预处理
车辆、行人、植被、灰尘等噪音点没有反映桥梁实体特性,增加了电脑内存负担,降低数据计算和使用效率,因此采用孤立点、反射率、无效点、厚度、镜面等方法,配合不同的参数设置,自动过滤点云数据中的噪音点;对遮挡桥梁的点云数据,采用手动框选删除。
根据文献[18]试验结果可得,扫描对象与扫描仪距离在20m内,水平中误差优于1.0mm,高程中误差优于1.5mm,可进行三级变形测量,满足规范[19]对中小型桥梁监测的要求。故删除扫描仪中心20m外的点云,以保证变形监测质量。
3.4 数据拼接
以人机交互的方式选取所有靶标点,后处理软件自动识别靶标中心点,并根据点云数量、距离、倾斜角度等计算识别质量,软件采用同名点、CloudtoCloud和PlanetoPlane等方法计算转换参数,根据布尔沙公式[式(1)]进行自动拼接,按式(2)~(8)评价拼接精度,拼接结果与质量见表2,由表2可见最大偏差均小于1.5mm,表示2次扫描点云拼接精度较高,满足危旧桥梁变形监测要求。
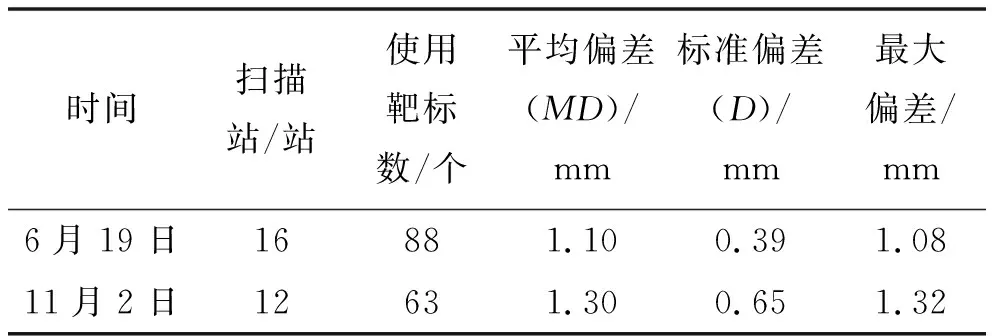
表2 扫描拼接精度(2014年)
(1)
dxi=xti-xri
(2)
dyi=yti-yri
(3)
dzi=zti-zri
(4)
(5)
(6)
(7)
(8)
式中:X1、Y1和Z1为扫描仪坐标系;X2、Y2和Z2为拼接坐标系;X0、Y0和Z0为平移参数;εx、εy和εz为旋转系数;m为放大系数;dxi、dyi和dzi为第i个靶标原始x、y和z坐标与拼接后坐标的偏差;di为第i个靶标原始坐标与拼接后坐标的偏差;μ为所有靶标偏差的平均值;MD为平均偏差;D为标准差。
通过数据预处理、拼接,最终形成桥梁点云如图2所示,点云平均点间距为3.1 mm,基于此可进行后续的桥梁健康监测研究。

图2 拼接形成桥梁点云数据
3.5 二维图件绘制
由于桥梁建设时间久远、管理机构多次更迭、纸质资料保管不善等原因,造成大部分中小型的危旧桥梁图纸缺失,使得桥梁的维护、保养、改扩建等极为不便。该文通过设置点云的固定面、分割面附近一定宽度(如5 mm)的点云,而后通过算法按内侧点、外侧点、最高点、最低点或平均点等类型连接点云形成轮廓线,解决了因点云错选漏选而造成桥梁结构轮廓失真的弊病。此次研究中,主要采用外侧点绘制桥梁的横断面(图3)和桥墩轮廓(图4),最低点绘制拱肋拱腹线(图5)等二维图件;在横断面图(图3)中,可对主要结构尺寸和名称进行标注,形成适用于日常管理的工作用图。通过对图4、6的进一步加工,还可用于后续维护和变形分析。
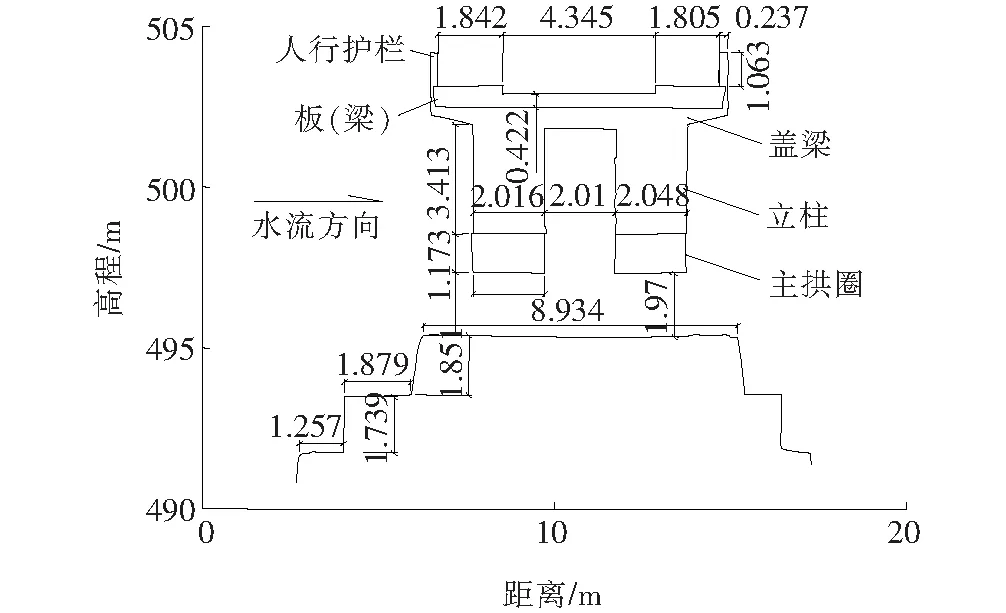
图3 桥梁横断面图

图4 桥墩轮廓线位移检测示意图(单位:mm)
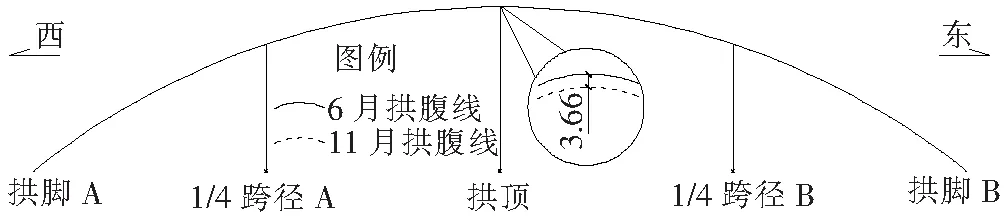
图5 不同跨径沉降检测示意图(单位:m)
4 结果与分析
4.1 病害检测
混凝土桥梁的病害主要分为表层缺陷和裂缝两大类,混凝土剥落、表层成块掉落、露筋、空洞等是表面缺陷的主要形式;裂缝可从安全、成因、力学机理、结构承载力等角度进行划分。基于三维激光技术进行病害检测主要方法有2类:① 对点云处理后再进行检测;② 联合点云和相片数据处理为正射影像图,再通过图像处理的方法进行裂缝检测。该文采用文献[22]的方法,制作桥梁拱腹面的正射影像图,将正射影像图进行边缘化、雕刻化等专业图像处理,再进行人机交互的裂缝、水迹线、缺陷的识别与测量,获得的结果如图6所示。多次扫描并按同一参数处理后,即可分析裂缝的新增、延长与收缩、消失情况,结果如图7所示。对不同缺陷进行编号,以便后续持续对比分析。
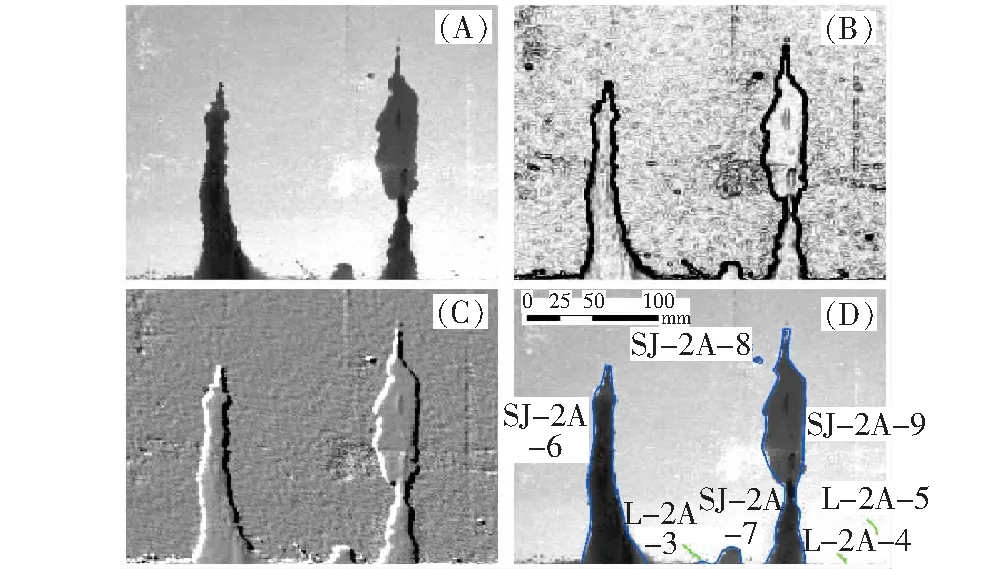
(A)原始图像;(B)边缘增强;(C)雕刻化;(D)病害识别;SJ表示水迹线;L代表裂缝;2A代表拱肋编号)
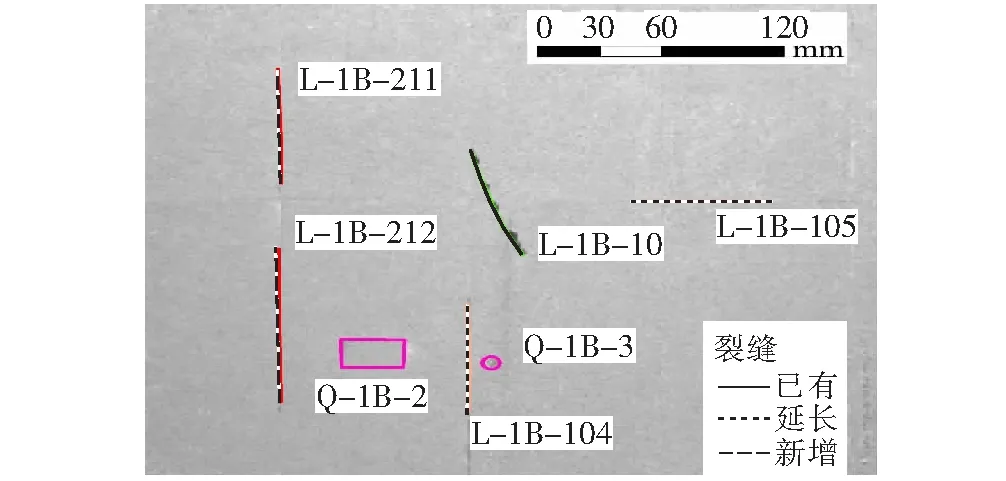
注:Q代表缺陷;1B代表拱肋编号
4.2 垂向位移
为充分发挥点云数据相对于全站仪和GNSS单点监测的优点,分别利用面状和线状测量结果进行桥面与拱腹面的垂向位移分析。
4.2.1 桥面变化
选取两次扫描中桥面的同一位置点云数据,采用点云后处理软件进行高程异常点的初次过滤,建立初步表面模型,而后删掉表面异常峰值,形成最终桥面模型。以6月桥面为基础,对比11月表面,得到桥面垂向变化(图8)。可见桥面沉降为+8~-8 mm(“+”代表桥面上升,“-”代表桥面下降),桥面中部位置靠近桥墩处总体沉降较小,为-1.5~+1.5 mm;桥面两侧变化幅度较大,部分区域超过±8 mm。
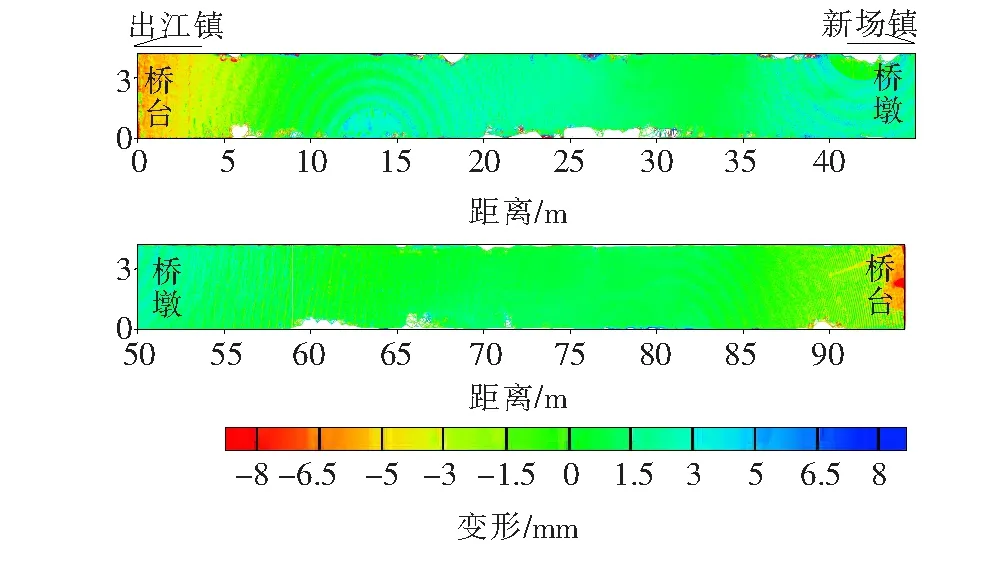
图8 桥面垂向变形量图
提取桥面每一点的沉降幅度(共计4 374 627点),按一定分组间距可得到每个区间的百分比,如图9所示。从图9可知:-3.0~-1.5 mm、-1.5~0 mm两个区间所占比例最大,两者之和为72.03%;沉降幅度大于±5.0 mm的较少,约占1.84%。

图9 桥面垂向变形范围比例图
4.2.2 拱腹线沉降
设固定的竖直平面通过每个肋拱,拱肋编号见图1。绘制拱腹线,在每条拱腹线的拱脚、1/4跨径和拱顶等5个固定位置,测量2次扫描形成拱腹线的距离(图5),即为垂向位移,结果如表3所示。选定的竖直剖面和不同跨径监测位置可持续利用,有利于今后持续进行沉降测量和分析。
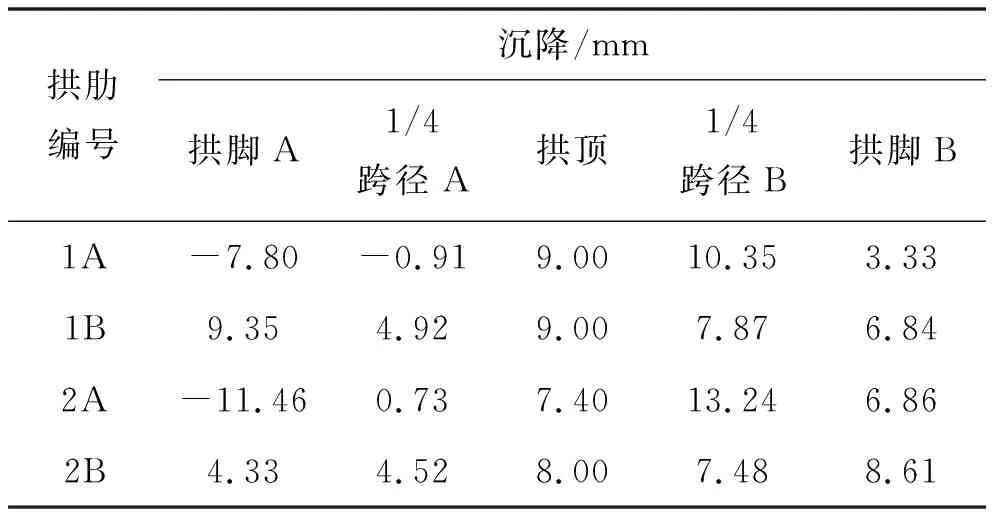
表3 拱腹线不同位置沉降统计表
由表3可知:拱腹线沉降平均值为5.08 mm;最大沉降值为13.24 mm,位于2A拱肋的1/4跨径B;最小沉降值为-11.46 mm,位于2A拱肋的拱脚A。
4.3 水平位移
设置一个通过中心桥墩且高于一般洪水位,高程为494.746 m的固定平面,制作桥墩轮廓线,采用轮廓线和质心等2种方案进行桥墩水平位移监测。
4.3.1 轮廓线位移
按0.1 m定距等分轮廓线,在等分点位置测量2次轮廓线间距离,即为桥墩水平位移数据(图4),共获得418个位移测量数据。
对测量结果进行统计,桥墩最大位移量为27.43 mm,最小为0.01 mm,平均为3.56 mm(表4)。将位移量划分为11组,统计每组所占百分比,形成图10。由图10可见位移量为2.09~3.13 mm所占比例最大,为20.10%;位移量为0.02~6.24 mm的6个区间所占比例都大于10%,总占比达89.95%。

表4 轮廓线位移统计 mm

图10 轮廓线位移范围比例图
4.3.2 质心点
根据前文获取桥墩轮廓线,采用文献[23]的方法计算桥墩2次扫描轮廓线的质心点,由此可计算桥墩质心位移量及方向(图11),获得结果见表5。由表5可见桥墩质心向213.81°方向(西河下游)移动了3.11 mm,位移距离与通过轮廓线计算的平均值很接近,进一步说明了此方法的有效性。
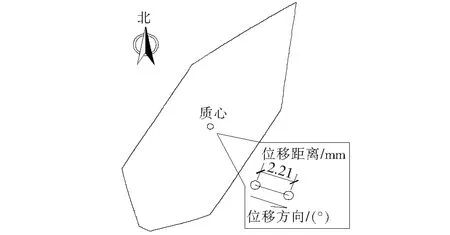
图11 桥墩质心位移检测示意图
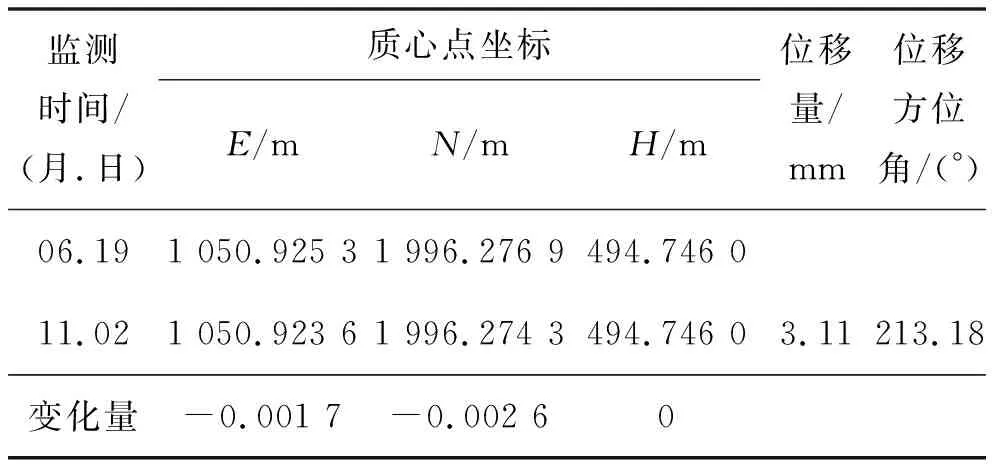
表5 质心位移统计(2014年)
5 结语
利用三维激光扫描技术,对大邑县虎跳河大桥进行了健康指标分析,复原了缺失的桥梁二维图件,并制作了拱肋拱腹线和桥墩轮廓线用于变形分析;结合点云数据和图像分析方法,进行了桥梁混凝土表面病害的识别、测量和对比。桥面垂向变化分析结果显示:桥墩附近沉降较小、桥台附近沉降幅度较大;拱腹线不同位置处的沉降平均值为5.08 mm。通过定距等分轮廓线检测的桥墩平均水平位移为3.56 mm;通过桥墩质心分析的水平位移为3.11 mm,方向为向西河下游。两种方法分析的位移量相近。
上述试验与分析结果表明:采用合理的控制测量、靶标布设、采集参数、数据处理和资料分析方法,三维激光点云数据的精度可达到较高水平,满足危旧桥梁病害检测和变形监测的技术要求。
现有三维激光扫描技术对裂缝宽度的测量还较为困难,这将是今后仪器性能提升和分析方法改进的主要方向;基于图像处理技术进行裂缝识别,已提出阈值分割、边缘检测、监督学习等自动识别方法,今后将朝着计算机视觉、卷积神经网络等人工智能识别的方向发展。
