基于改进蝴蝶算法的光伏综合负荷模型参数辨识
2021-11-22亢朋朋朱思宇王衡樊国伟杨桂兴
亢朋朋,朱思宇,王衡,樊国伟,杨桂兴
(1.国网新疆电力有限公司,新疆乌鲁木齐 830002;2.北京科东电力控制系统有限责任公司,北京 100089;3.新疆大学,新疆乌鲁木齐 830046)
0 引言
受政策倾斜影响、维护成本下降和设备技术改良等原因,清洁环保的可再生能源装机容量增长迅速[1],[2]。大量分布式光伏并入配电网,特别是负荷侧,会导致配电网从原有的无源网络变为有源网络,动态特性发生明显变化,从而可能对系统安全性、稳定性产生影响[3]。传统的综合负荷模型无法准确地描述此类配电网的区域负荷特性,严重影响电力系统仿真分析结果的准确性[4]。因此,对含分布式光伏的配电网进行准确建模与参数辨识成为亟待解决的问题。
文献[5]通过构造一个等值光伏电站与负荷模型并联的方式,搭建了考虑光伏动态特性的等值模型,采取动态轨迹灵敏度法筛选出重要参数,再通过遗传算法进行重要参数的辨识。文献[6]采用一个有功随电压变化的有功功率源来代表光伏并网系统,采用聚合算法聚合参数,并对低灵敏度参数进行固定,然后通过遗传算法对高灵敏度参数进行辨识。文献[7]采用改进的遗传算法来辨识高灵敏度参数。在待辨识参数较多的情况下,传统的遗传算法因其收敛慢、易陷入局部极值等缺点,不利于综合负荷模型的参数辨识速度及精度的提高。为了更快地得到精确的辨识结果,本文搭建了计及分布式光伏的综合负荷模型(Synthesis Load Model with Distributed Photovoltaic,SLM-DP),将蝴蝶算法加以改进后引入负荷模型参数辨识领域。基于算例分析,从收敛速度、辨识精度等维度进行多算法对比,显示了该算法的优越性和实用性。
1 计及分布式光伏的综合负荷模型及参数辨识
计及分布式光伏的综合负荷模型(SLM-DP)由配网等值阻抗、静态负荷、等值电动机和光伏发电模型4部分组成。其中,静态负荷、等值电动机和光伏发电模型并联于一条虚拟母线,再经配网等值阻抗连接负荷母线。SLM-DP结构如图1所示。

图1 计及分布式光伏的综合负荷模型结构Fig.1 Structure of synthesis load model with distributed photovoltaic
图1中,RD,XD为配网等值阻抗。
综合负荷模型的功率平衡方程如下:
式中:P,PD,Ps1,Pd1,PPV分别为SLM-DP、配网等值阻抗消耗有功、静态负荷、等值电动机、光伏发电系统的有功功率;Q,QD,Qs1,Qd1,QPV分别为SLMDP、配网等值阻抗消耗无功、静态负荷、等值电动机、光伏发电系统的无功功率。
静态负荷和等值电动机共同组成负荷模型以描述配网整体负荷特性。
1.1 负荷模型
静态负荷模型采用ZIP模型表现负荷的静态特性,由恒阻抗、恒电流和恒功率负荷3类组成,该模型可表示为

式中:P0,Q0分别为静态负荷端电压为基准值V0时的静态负荷有功功率和无功功率;p1,p2,p3与q1,q2,q3分别为各类负荷所占的百分比(p1+p2+p3=1,q1+q2+q3=1)。
采用如下等值电动机模型描述电动机的动态特性:

式中:Pd1,Qd1分别为等值电动机有功功率和无功功率;Ud1为等值电动机定子电压;Rr,Xm分别为转子电阻和励磁电抗;Xσs,Xσr分别为电动机定子、转子漏抗;s为转子滑差;ωr为转子转速,ωr=1-s;ω1为等值电动机中定子磁场转速;TJ为惯性时间常数;Ir为等值电动机的转子电流;TE为电动机电磁转矩;TM为电动机机械转矩;KL为电动机负载率系数;α为与转速无关的阻尼力矩系数;β为与转速有关的阻力矩的方次。
由文献[8]可知,重要参数配网等值电抗XD、定子电抗Xs、负载率KL和电动机比例PMP通过辨识确定,其他次要参数通过统计综合法来确定。
1.2 光伏发电并网模型
本文采用的光伏发电模型结构如图2所示。模型由光伏电池模块和控制模块组成,经光伏出线等值阻抗XPV与虚拟母线相连。

图2 光伏并网模型结构Fig.2 Structure of photovoltaic grid connection model
结合工程实际和光伏电池的I-V输出的外特性搭建光伏电池模型[6]。同一种控制模式下,光伏发电系统的动态特性因逆变器的控制参数差异而表现不同[9]。直流侧电容方程可表示为

式中:Pac为阵列输出的有功功率;ic为流过电容器的电流;C为直流侧电容值;Udc为直流母线电压。
本文控制系统采用定直流侧电压控制与定功率因数控制的控制模式,控制系统如图3所示。

图3 控制系统框图Fig.3 A block diagram of a control system
图3控制系统的有功控制环节中:Vdc-ref为光伏电池阵列模型输出的直流侧电压参考值;Vdc为直流侧母线电压;TMA为有功测量环节时间常数,s;Vm为交流侧测量电压;KPA,KIA分别为有功比例环节和积分环节放大倍数;Pgen为测量有功值;PFref为参考有功功率值,通过其求得参考功率因数值;TPE为无功测量环节时间常数,s。
综上可知,光伏发电系统模型参数共6个,分别为光伏出线等值阻抗XPV、直流侧电容值C和控制系统中的4个控制参数。
1.3 SLM-DP参数辨识
根据以上分析,SLM-DP共包含如下10个待辨识参数:

式中:θ为SLM-DP待辨识参数集合。
将SLM-DP系统功率平衡方程进行离散化处理,得到SLM-DP系统功率平衡方程的离散方程。以有功功率平衡方程离散化过程为例,表示为

式中:Pout(k)为SLM-DP系统有功功率输出;Pin(k)为SLM-DP系统有功功率输入,Pin(k)=PD(k)+Ps1(k)+Pd1(k)-PPV(k);M(z-1),N(z-1)分别为SLM-DP系统有功功率输入、输出多项式,具体表示为
式中:mi,ni为多项式系数,可根据SLM-DP系统运行过程中的运行参数确定;xm,xn为多项式阶数。
对式(8)进行最小二乘变换,可得:
为了提高SLM-DP待辨识参数集合θ中各项参数值的辨识模拟准确性,在k时刻,利用SLM-DP系统在k-1时刻的参数辨识模拟值θ(k-1)和系统历史数据φ(k),求解出SLM-DP系统在k时刻的输出功率输出模拟值:

采用均方根误差(RMSE)法,衡量模拟值和真值之间的偏差,并将其结果作为评估参数辨识结果优劣的判断标准。当采样点数为N时,计及分布式光伏的综合负荷模型输出有功和无功功率的均方根误差为

式中:rp,rq分别为系统输出有功和无功功率的均方根误差;Pm,Qm,分别为有功和无功功率的真值和模拟值;N为数据样本个数。
目标函数为

将计算得到的误差,传递给k时刻SLM-DP参数辨识计算过程,求解出k时刻的SLM-DP待辨识参数集合θ中各项参数值的模拟值θ。更新k时刻的参数辨识模拟值θ,开始下一时刻的SLMDP参数辨识计算。依次下去,直到求解出实际SLM-DP待辨识参数集合θ中各项参数值模拟值。
2 基于改进蝴蝶算法的负荷模型参数辨识
Arora提出的蝴蝶算法(Butterfly Optimization Algorithm)是一种全新的元启发式智能优化算法[10]。该算法的灵感来源于蝴蝶觅食和求偶行为,蝴蝶获取和分析空气中的气味以确定目标的可能方向。当蝴蝶在搜索空间感受到最优蝴蝶的香味并朝着最优蝴蝶移动时,该阶段为全局搜索。当蝴蝶无法感受到其他蝴蝶香味而选择随机移动时,该阶段称为局部搜索。
在辨识计算计及分布式光伏的综合负荷模型待辨识参数集合θ中的各参数时,针对基本蝴蝶算法存在收敛精度低、易陷入局部最优的问题,本文提出一种改进蝴蝶算法(Improved Butterfly Optimization Algorithm,IBOA)用于辨识计算计及分布式光伏的综合负荷模型待辨识参数θi。采用改进蝴蝶算法进行辨识求解时,在搜索过程中加入惯性权重调整、飞行干扰因子和最优位置干扰来平衡全局搜索和局部搜索环节,以保证待辨识参数集合θ种群中各参数θi位置多样性,避免算法陷入局部最优状态。
2.1 惯性权重调整
采用改进蝴蝶算法对计及分布式光伏的综合负荷模型参数θi进行辨识时,对参数θi搜索,引入单调递减的惯性权重来更新待辨识参数集合θ种群中各参数蝴蝶θi的自我认知部分,提高待辨识参数蝴蝶的主观能动性[11],[12]:


初始惯性权重ωmax=0.9,个体的移动范围较小,不会很快聚集;结束时的惯性权重ωmin=0.4,算法具有较强的搜索开发能力。
2.2 最优位置干扰
在BOA的全局搜索阶段,所有蝴蝶均朝向全局最优位置飞行,这样很容易陷入局部最优。引入文献[13]的多段扰动策略——方差可调的正态随机分布,对蝴蝶算法全局位置搜索最优花蜜位置的过程进行改进。采用改进后算法,求解得到的新的全局最优待辨识参数蝴蝶θi的花蜜位置gbest可以表示为

式中:δ为相对于g*的不确定度,是对迭代次数的非增函数,其更新公式如下。

式中:δ1,δ2,δ3为正态分布的半径,且δ1>δ2>δ3;α1,α2为控制半径变化的时间参数,且α1<α2;t为当前迭代次数;T为最大迭代次数。
2.3 飞行干扰因子
考虑到基于蝴蝶算法的参数辨识计算过程中,待辨识参数蝴蝶θi在各时刻产生的辨识目标香味大小不应该一直保持不变。因此,在待辨识参数蝴蝶θi位置公式中引入干扰因子,确保待辨识参数蝴蝶θi具有一定的随机飞行概率,以保持种群的多样性[14]。


式中:r4为[0~1]之间的随机数;interference是一个非常小的常数,interference=0.000 1;Pir为设定好的干扰概率,Pir=0.3。
2.4 基于改进蝴蝶算法的参数辨识算法步骤
基于改进蝴蝶算法(IBOA)的计及分布式光伏的综合负荷模型参数辨识算法具体步骤如下。
①初始化:设置算法参数,初始化待辨识参数蝴蝶θi,根据搜索空间的上下限,随机生成一个N×d的矩阵(N为个体数目,d为个体维度)。
②计算适应度值,并确定辨识参数蝴蝶θi的最优花蜜源位置:根据基于均方根误差的目标函数计算待辨识参数蝴蝶θi适应度值,最小值的待辨识参数蝴蝶θi位置为花蜜源位置,并根据式(15)计算待辨识参数蝴蝶θi香味大小。由于适应度函数是寻找最小值,而越优的待辨识参数蝴蝶θi香味越大,因此刺激强度I取目标函数的倒数1/R。
③更新待辨识参数蝴蝶θi位置:根据切换概率P和式(19)判断当前迭代进行全局搜索还是局部搜索,并更新确定每只蝴蝶位置。
④重复步骤②,③,直至达到设置的迭代结束条件,终止算法,输出最优解。
3 仿真算例及算法比较
3.1 多算法效果对比
为验证本文提出算法的鲁棒性和有效性,在PSD-BPA平台搭建如图4所示的仿真算例。利用上述SLM-DP模型,采用IBOA算法、PSO算法、GA算法、BOA算法分别进行20次独立的模型参数辨识对比实验。参数辨识实验最大迭代次数设置为100,种群个体数设置为30,各算法的参数设置如表1所示。

图4 仿真系统结构图Fig.4 The structure diagram of simulation system

表1 各个算法参数设置Table 1 The adjustment of algorithm parameters
计算20次独立实验的平均适应度收敛值:

式中:Ftbest为平均适应度收敛值,反映全局最优适应度值在迭代过程中的平均变化规律;M为独立实验次数;ftbest为每次独立实验的第t次迭代时的全局最优适应度值。
4种算法的迭代过程中均方根误差目标函数变化曲线如图5所示。
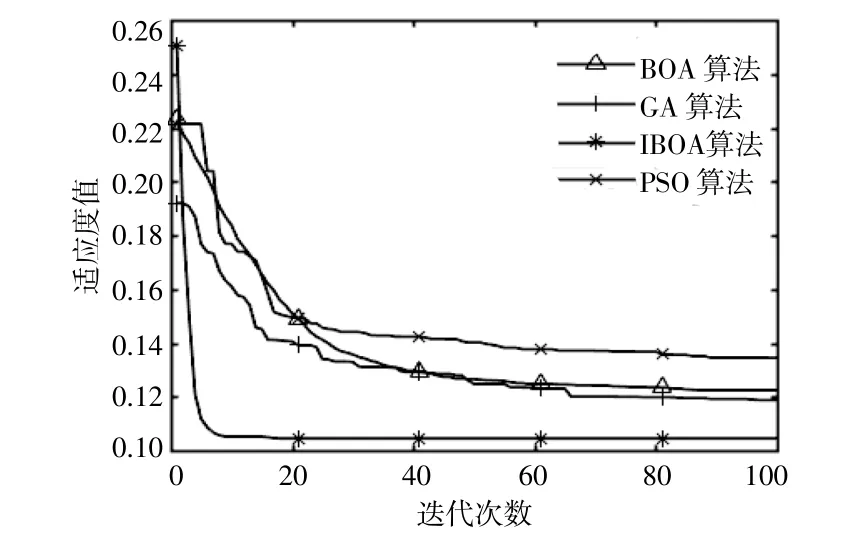
图5 多算法平均收敛曲线Fig.5 Mean convergence curves of multiple algorithms
由图5可知,IBOA算法用于负荷模型参数辨识,可比其他算法较快地达到精度要求,且收敛精度更高。这说明IBOA算法可减少迭代次数。由于进行电力系统仿真的时间要远大于算法运行时间,因此减少迭代次数对降低参数辨识总时间具有显著作用。
3.2 实测短路试验数据算例验证
2019年10月26日,在某220 kV洛浦变电站浦田二线进行了人工短路试验。短路类型为B相人工接地短路,持续时间0.06 s,电压跌落深度约24%。110 kV普鲁变电站为负荷站,该站与一装机容量为60 MW的光伏电站相连,短路试验前光伏电站出力约40 MW。短路发生后,监测到110 kV普鲁变母线电压最低跌落深度约76%。以该节点实测电压为输入量,采用实测短路试验数据注入仿真系统的方法,对普鲁站实测母线电压数据进行模拟,所得实测和模拟的电压标幺值曲线如图6所示。经计算,实测和注入电压仿真数据的平均相对误差约为1.96%。以该节点实测有功功率和无功功率作为输出量,对SLM-DP模型进行参数辨识。

图6 实际短路试验和仿真模型的电压曲线Fig.6 Measured and simulated voltage curves
利用IBOA算法进行辨识寻优。算法的最大迭代次数设为100,种群数量设为30,得到的最优模型参数下的仿真功率和实测功率曲线见图7。

图7 实际短路试验和仿真模型的功率曲线Fig.7 Measured and simulated power curves
辨识得到的最优模型参数如表2所示。从功率拟合曲线结果看,除短路期间的部分有功功率模拟输出与实测数据在功率峰值时刻拟合不够理想外,在功率的整个响应变化趋势上与实测数据基本具有一致性。分析其原因如下:①假设仿真过程中负荷是恒定的,但系统中实际负荷会出现随机波动;②假设仿真过程中环境温度和光照强度恒定,但实际上这两个参数可能会出现波动;③因测量装置技术限制,实测数据本身存在误差。
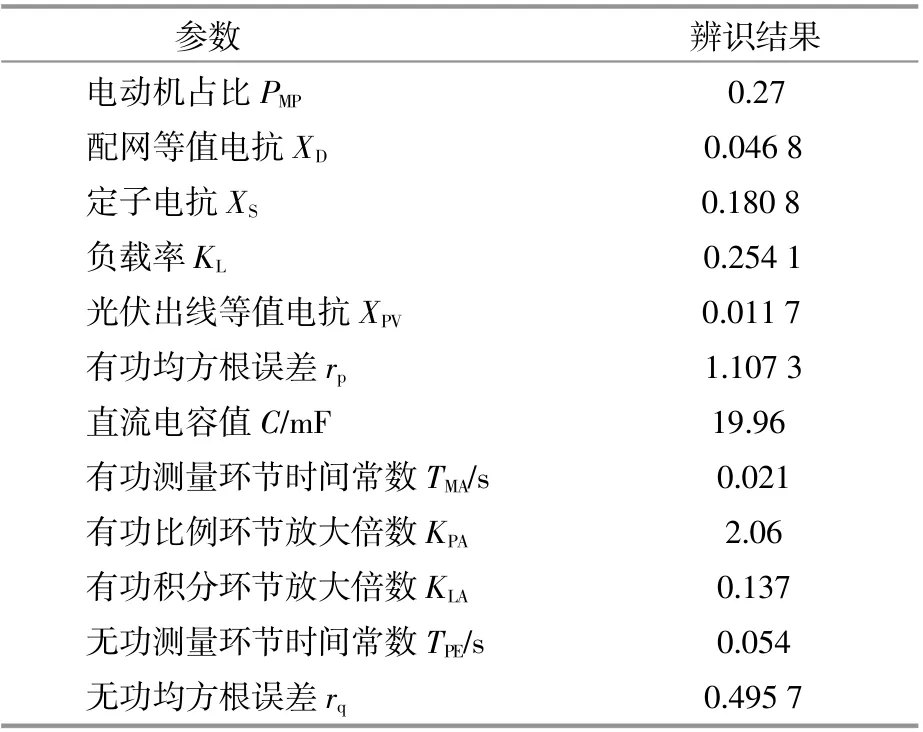
表2 优化模型参数值Table 2 Optimized model parameter values
4 结论
本文针对分布式光伏所在负荷地区传统负荷模型无法准确描述的问题,搭建了包含分布式光伏的光伏综合负荷模型(SLM-DP),提出了一种基于改进蝴蝶算法的模型参数辨识方法。利用仿真算例和实际人工短路试验数据并基于改进蝴蝶算法(IBOA)进行了SLM-DP模型参数辨识,主要结论如下。
①基于负荷特性和光伏并网发电系统特点,构建了含分布式光伏的光伏综合负荷模型(SLMDP)。
②对蝴蝶算法(BOA)进行了改进,通过增加惯性权重因子平衡全局搜索与局部搜索,为增加种群多样性,避免过早陷入局部极值,加入最优位置干扰和飞行干扰因子,并将改进BOA算法用于模型参数辨识。
③搭建了BPA仿真模型算例,采用IBOA算法进行SLM-DP模型参数辨识仿真验证,并与PSO,GA和BOA算法的结果进行对比,表明IBOA算法在收敛速度和收敛精度等方面均表现出显著优势。
④采用实测短路试验数据进行模型参数辨识验证的结果表明,基于IBOA算法用于SLM-DP模型参数辨识具有可行性和实际有效性。
