智能管道清理机器人
2021-11-22刘进芬王志娜赵余婷
刘进芬,王志娜,赵余婷,刘 斌
(南京工业大学 浦江学院,江苏 南京 211816)
0 引 言
随着城市化进程的不断推近、城市人口的持续增加,地下管道的使用逐渐增多。从70年代开始,管道运输便已应用在各行各业的公共设施中,比如生活水暖供应、石油运输、天然气输送、污水排放等领域[1]。管道中长期堆积尘埃和污染物,在传统的人工清理与检测方式下,管道的监测会耗费巨大的财力、时间;而且各种液体和气体物质在管道网络输送的同时,经常会发生一些不良反应,再加上管道自身存在的内部弊端,导致工业生产效率大大降低。由于对管道未及时清理,导致利用管道传输的液体出现杂质,长期下来便会出现杂质积聚现象,尤其是像碳酸盐或硝酸盐之类的硬垢的积聚会引起管道传输出现不畅和堵塞的情况,严重影响生产[2]。不仅如此,许多时候在运输过程中管道会突然出现损坏及物质泄漏等事故,这时便需要结束工作流程并安排专业人士进行维护,这样产生的经济损失是非常巨大的。
随着社会经济不断发展,管道输送因其便捷性、经济性得到广泛使用,流体仍然主要依赖于管道输送。管道线路的及时清理对国家资源的安全性及有效性都起到极大作用,而以智能机器人代替人工清理管道逐渐受到关注。机器人的发展已成为近年来的研究热点,特别是机器人流程自动化(RPA)。现阶段的机器人分地面、水下、工业、农业、服务、娱乐等领域。一个智能机器人应该具有感知环境的能力、执行某种任务和对环境施加影响的能力、感知与行动结合起来的能力。目前拥有RPA的机器人不仅可以模拟人类,还可以利用和融合现有技术,逐渐涉及更多的领域,发展前景广阔。
1 管道清理机器人相关理论
智能的管道清理机器人是通过机器控制机器人去检测并清理管道的一种新型机器人[3]。以共轴反转螺旋式的机器人为例,介绍了智能管道清理机器人的相关技术。
(1)工厂云智能制造信息系统:通过导入深化设计数据,利用RFID[4]、二维码等物联网技术,将地下管道的布局导入系统中,应用物联网手段精确定位[5],远程无线智能控制管道机器人的不同行进动作,完成相应作业。
(2)共轴反转螺旋式机器人基本可覆盖的管道作业有:①生产、安装过程中的管内外质量检测;②使用过程中焊缝情况、表面腐蚀、裂缝破裂等故障诊断;③恶劣环境下管道清扫、喷涂、焊接、内部抛光等维护工作;④对埋于地下的旧管道的修复;⑤管道内外器材运送、抢救等其他用途。
(3)智能化:在大数据、物联网和人工智能等技术的支持下,通过APP来控制管道机器人的运作,可以根据外界的环境实时地处理遇到的情况,是硬件与软件的充分结合。
2 智能管道机器人的技术
(1)螺旋技术
管道清理机器人分为前后两部分,它们通过空心柔性轴的共轴线连接在一起;每部分都有一圈均布的3个径向支撑腿,在每个支撑腿的顶端各有一个小轮可以在管道内滚动,并利用电机带动柔性轴使得各部分向相反方向旋转前进。
每个小轮与支撑腿轴线成一定角度,机体两部分上的小轮轴线与机体轴线的夹角相反,两部分机体反转,则两部分机体上小轮的运动轨迹为旋向相反的螺旋线。每个小轮与管道内壁的轴向摩擦分力方向相同(如图1所示),每个小轮的轴向摩擦分力的合力就成了驱动机器人行进的动力。

图1 力的分解示意图
(2)空心柔性轴连接
机器人两部分机体用空心柔性轴连接(如图2所示),使其能在一定曲率的弯管道里行进,扩大了适用范围,提高了稳定性[6];机器人可以更好地在管道中前进和作业。
图2 空心柔性轴连接
(3)双排可伸缩支撑腿
机器人在管道内螺旋行进,为保持它在管道中的姿态和行进稳定性,在机器人的每个半体上安装三个支撑腿,避免机器人出现失稳现象,支撑腿端部装有与管道母线成一定角度的滚轮;两部分机体上滚轮攻角相反,在两机体反转条件下产生同向的轴向摩擦分力以实现机器人行进,这增大了机器人在管道里的附着力,使其爬行与越障能力明显增强[7]。
3 智能管道机器人各个模块的设计
3.1 各个模块详细设计
(1)探测模块
选用光传感摄像头[8],配套LED灯光,捕捉图像。采用模式识别和神经网络等一系列图像处理方式,将采集到的图像做进一步处理,提高检测效率。使用数字罗盘采集机器人的实时位姿数据,采用神经网络的方法实现自动纠偏控制,使得机器人更加智能化、人性化,操作起来更加简单方便。
(2)蓝牙报警装置
当管道清理机器人在管道内作业时,可能会遇到信号传输过程中受到一系列干扰的问题。为解决这一问题,设计一款蓝牙通信报警装置。该装置利用蓝牙无线通信与上位机显示数据有效地预防上述情况的发生。本模块主体选用了两个HC-05蓝牙模块与 Arduino Nano[9]控制器,采用了双机通信。当双机正常通信时,放置在外面的从机报警器不会报警,并且上位机显示OK字符;当双机通信中断时,放置在外的从机报警器会报警,并且上位机显示WARN字符提醒操作人员机器将要超出控制范围,这时操作人员需要合理控制机器与操作人员的范围,范围控制好之后,报警结束,以此构建一种稳定的控制环境。
(3)电路的设计
因为管道狭小,所以要求管道清理机器人拥有更小的空间结构,需要体积小、能量密度高的电池,为此选用两块3.7 V、820 mAh的锂离子电池作为管道清理机器人模型的电源。采用市场上成熟的STM32单片机。这种单片机性能稳定可靠,并且满足对清理机器人控制所需的通道数目,使机器人能够更好地清理管道[10]。
(4)智能模块
管道清理机器人通过空心柔性轴的共轴线连接在一起,每部分都有一圈均布的3个径向支撑腿,在每个支撑腿的顶端各有一个小轮可以在管道内滚动。主要工作流程如图3所示。机器人整体通过STM32控制,内部装有无线模块、电机等控制结构;将编写好的程序输入单片机后,通过APP下达指令,由单片机控制电机带动空心柔性轴旋转;而空心柔性轴直接连接前后两个半体,所以在柔性轴的旋转下,前后两个半体也开始旋转,但由于外侧小轮的特定角度不同,所以两个半体在柔性轴的带动下旋转方向也不同。机体两部分上的小轮轴线与机体轴线的夹角相反,两部分机体反转,则两部分机体上小轮的运动轨迹为旋向相反的螺旋线。每个小轮与管道内壁的轴向摩擦分力方向相同,每个小轮的轴向摩擦分力的合力就成了驱动机器人行进的动力,从而进行工作。
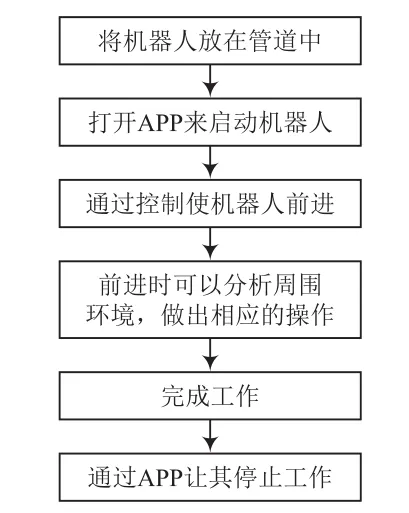
图3 主要的工作流程
3.2 智能管道机器人的优势
智能管道机器人能够节省人力成本与时间成本;共轴螺旋行进方式具有驱动电动机少、操作控制简单的优点;探测模块能够捕捉到更为清晰的图像;设计了蓝牙通信报警装置,构建了一种稳定的控制环境;可远程无线智能控制管道机器人进行不同的动作。
4 结 语
智能管道清理机器人是一种共轴反转螺旋式机器人,滚轮能以与管道母线形成固定的倾斜角度的形式绕本身的轴线旋转。共轴螺旋行进方式具有驱动电动机少、操作控制简单的优点,减少了人力和时间成本,提高了工作的效率。
