基于分支结构的智能驾驶安全出行探究
2021-11-20冯乾
冯乾
课程背景
智能驾驶是近几年的一个社会热点问题,但是智能汽车在给我们的生活带来便利的同时也造成了很多社会安全问题,比如汽车智能驾驶系统遇到突发情况来不及反应导致车祸,通过复杂路口时难以判断引起交通事故,等等。本节课以帮助汽车智能驾驶系统更安全为主题,聚焦智能汽车行驶过程中可能遇到的安全问题,与学生一起探索如何利用分支结构改进智能驾驶系统,使得行驶更加安全。
教学目标
知识与技能 了解分支结构的基本作用;了解颜色传感器和红外线传感器的基本作用。
过程与方法 通过实现程序的“红灯停,‘会转弯”和“躲障碍”功能,梳理分支结构使用的一般步骤;经历脚本编写、运行、调试、纠错的基本流程,感受算法的效率,掌握程序调试与运行的方法。
情感态度与价值观 了解智能信息处理的巨大进步和应用潜力,认识人工智能在信息社会中的重要作用;体会程序设计的快乐,激发学习兴趣,形成应用所学知识解决问题的意识;经历行车过程中会遇到的具体问题,培养学生交通安全意识。
教学重点与难点
教学重点 使用分支结构和颜色传感器、红外线传感器实现智能驾驶功能。
教学难点 理解分支结构和传感器是如何智能调整车辆行驶状态的。
教学准备
华为平板电脑40台,乐高EV3套件8套,智能车运行场地8块,作业单、实物投影仪,等等。
教学过程
一、情境导入,提出问题
教师介绍人工智能在汽车驾驶中的应用,然后出示几个近期智能汽车在自动驾驶中出车祸的新闻,再请学生观看一段无人驾驶汽车在公路上行驶的视频,分析视频场景里的无人驾驶汽车在马路上行驶的时候怎样可以更加安全。
学生思考并总结、交流、分享。
二、引入新课,走进分支结构
1.复习旧课,拆分问题
师:从视频中我们发现很多事故发生的原因就是智能驾驶系统在该停下的时候没有停下。那么哪些情况下汽车应该停下来呢?
学生交流讨论,总结出两种情况:路口遇到红灯;行驶过程中遇到障碍。
师:那么我们就先来实现让小车能够在路口遇到红灯的时候停下来的功能。大家根据之前学过的知识回忆一下,乐高机器人识别颜色需要用到什么传感器呢?
预设学生答案:颜色传感器。
2.如何帮助小车破解红灯困局
构建问题情境:汽车智能驾驶系统的颜色传感器在路口侦测到红灯亮起应该怎么办,没有红灯亮起应该怎么办。
化归为算法问题:当小车行驶到路口时,判断红灯是否亮起。如果亮起,小车停下;否则,小车继续行驶。
走进分支结构:过去我们学习了顺序结构,顺序结构虽然能够做很多事,但是没有办法做判断和选择,遇到一些需要做判断选择的问题就要用到分支结构。在刚刚的问题里,程序开始后小车就要对是否遇到红灯做判断,“是”的话停止,“否”的话继续前进。
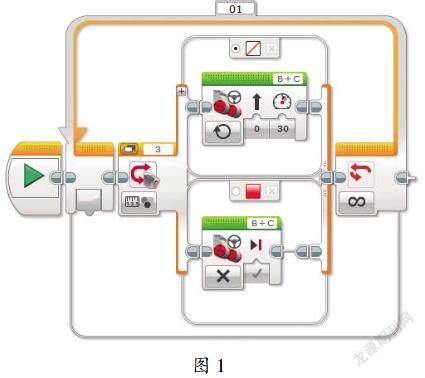
在使用乐高编程的时候可以使用“切换”模块来实现分支结构的功能。可以将不同的程序模块拖到不同的分支上来实现分支结构的效果。同时注意一定要给分支模块找对合适的传感器以及正确的端口,才能够让小车对需要的信息进行反馈。这里需要让分支结构对色彩传感器的“测量”“颜色”进行判断。
学生以小组为单位编程,程序如图1,安装传感器并通过机器人调试程序,完成后学生交流展示。
3.总结归纳,功能扩展
师:智能驾驶汽车每一次在路口遇到红灯也不能一直停在那里,有的时候交通管理部门会出示一些指示牌,帮助车主去绕行。请同学们试着给程序添加一个功能,让小车遇到蓝色的指示牌能够向左转弯绕行重新找路到达目的地。
构建问题情境:汽车智能驾驶系统在路口侦测到红灯亮起应该怎么办,侦测到蓝色指示牌应该怎么办,其他情况应该怎么办。
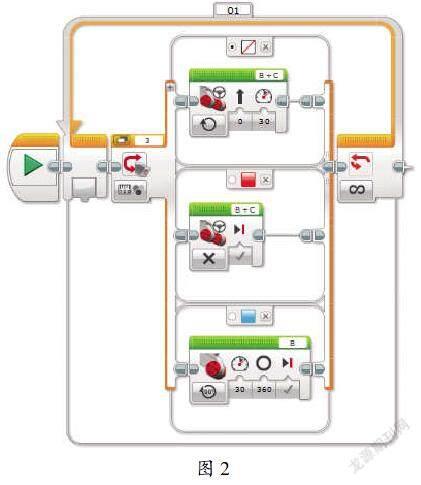
化归为算法问题:首先小车行驶到路口,然后判断遇到的颜色。如果遇到红色,小车停下;如果遇到蓝色,小车向左转弯;否则,小车继续行驶。
学生以小组为单位编程,修改程序,如图2,通过机器人调试程序。学生交流展示。
三、巩固拓展,举一反三
為了帮助学生巩固拓展所学知识,教师请学生根据刚刚所学自己设计智能驾驶汽车遇到障碍物能够停下的系统程序,引导其思考是否应该使用不同的传感器来接收不同的信息。
师:红外线传感器可以测量物体的红外线反射信号。躲避障碍是当障碍物离我们特别近的时候才需要去躲避,遇到障碍物停下采用红外线传感器的近程模式测量得比较准确。红外线传感器受到环境光、阴影和障碍物材质的影响比较大,每一个小组需要根据情况对具体的数值进行调整。
率先完成的小组,教师可让其拓展延伸,自主探索如何让智能汽车避开障碍物。教师要鼓励学生提出不同的方法并尝试实现,评价不同方法的优劣。
构建问题情境:小车逐渐靠近障碍物,汽车智能驾驶系统侦测到红外线传感器反馈数值变小。
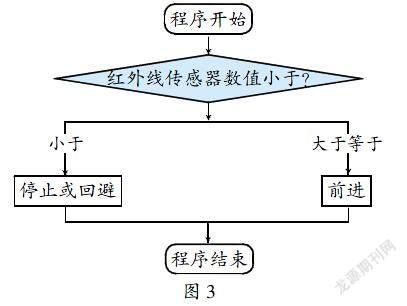
划归算法问题:当红外线传感器反馈数值小于某一个值时,汽车智能驾驶系统执行停止或回避;当红外线传感器反馈数值大于等于某一个值时,汽车智能驾驶系统执行前进,如图3。
学生以小组为单位编程,修改程序,如图4。
学生交流展示,教师评价学生不同的方案。学生常见方案有:向后退然后转弯来躲避障碍;直接转弯再躲避障碍;与障碍物留出一段空间直接转弯;等等。这里需要强调躲避的时候不能碰到障碍物,也不能碰到后车。汽车智能驾驶系统发出的指令需要对红外线传感器反馈的结果做出合适的调整。
四、总结归纳,深化主题
教师总结分支结构程序设计要点,提醒学生要慎重编写判断条件,仔细调试才能够达成需求,让程序比较完美地运行。
教学反思
本节课从社会热点智能驾驶的安全问题入手,围绕如何帮助智能驾驶系统提高安全性展开。由“遇到红灯亮”引出运算关系,由红外线传感器的应用引出对分支结构条件的进一步思考,层层递进,层层深入。
人与人工智能之间的关系是近几年来常讨论的话题。人工智能给生活带来了便利,在扩展人脑思维界限的同时也给我们带来了很多安全问题。学生在学习运用算法知识解决问题的同时,还需要了解算法应用所带来的社会问题、人文问题,将人文关怀渗透进冰冷的机器语言中。
本节课在教学过程中涉及一定的硬件安装和调试环节,尤其是红外线传感器的使用。红外线传感器受制于环境光和阴影等因素,需要根据具体情况调整变量。教师在培养学生动手能力的同时,更要让学生养成具体问题具体分析的思维习惯和软硬件要互相适应的直观体验。
