满足UIC 标准的防滑测试台架方案设计*
2021-11-19齐政亮李邦国温熙圆
周 军,齐政亮,蔡 田,李邦国,温熙圆
(1 中国铁道科学研究院集团有限公司 机车车辆研究所,北京 100081;2 北京纵横机电科技有限公司,北京 100094)
车轮滑行保护系统(Wheel Slide Protection,简称WSP)的目的和宗旨是在轮轨低黏着条件下轮对发生滑行时尽可能地避免轮对擦伤,并有效利用轮轨间黏着以缩短列车制动距离,二者缺一不可,这也是评价防滑系统优劣的重要技术指标。因此,防滑系统在装车运用之前必须通过功能和性能测试,以验证其有效性、可靠性及安全性。根据UIC 国际防滑标准要求,防滑系统的测试方法包括2 种:一是线路试验,二是仿真台架试验[1-2]。由于防滑线路试验组织管理成本较高且耗时长的特点,对于现有防滑系统的优化改进或者新研制的防滑系统,一般可采用仿真台架试验来代替线路试验。仿真测试台架应能够完整准确地再现防滑线路试验过程中的车辆参数、黏着条件、轨道坡度以及防滑控制效果。与线路试验相比,仿真台架试验可以极大地提高研发效率,节省研发成本,降低试验周期。同时,防滑台架试验也是研究黏着机理、指导防滑系统研发及性能考核的重要手段。此外,空气制动系统模型的建立、轮轨关系仿真数学模型的评价、防滑系统实际运用的线路数据分析、防滑系统控制参数和控制策略的优化,都需要借助防滑仿真台架测试来实现[3-4]。
1 防滑测试台架的设计要求
1.1 结构要求
国际防滑标准UIC 541-05 规定:仿真器应基于硬件在环(Hardware in Loop,HIL)原理。仿真器的最小控制环结构应包括:
(1)根据给定的黏着—蠕滑曲线和制动力计算得出轮对速度。
(2)防滑系统(被测试对象)的输入为轮对速度。
(3)防滑系统可对制动力进行控制调节。
(4)制动力反馈输入到仿真器。
UIC 541-05 标准规定防滑测试台架根据被测试硬件的不同可分为4 类结构[1]:
1 类结构:包括仿真控制单元(仿真器)、轴速模拟单元、气动模拟单元(防滑阀和空气制动系统),可作为一个整体系统。
2A 结构类:包括仿真控制单元(仿真器)和气动模拟单元(防滑阀和空气制动系统)。
2B 结构类:包括仿真控制单元(仿真器)和轴速模拟单元。
3 结构类:仅包括仿真控制单元(仿真器)。
1 类防滑测试台架结构如图1 所示,2A 类、2B类和3 类测试台架结构分别在1 类结构的基础上,用仿真机模拟相应部分。图中标记红色的组件是被测试对象—防滑控制单元WSP。 上述各类防滑测试台架结构,其硬件选择总是优于软件模型。

图1 UIC 标准规定的1 类模式防滑测试台架结构
1.2 验证要求
UIC 标准规定防滑测试台架评估应满足最大精确度和可重复性的指标要求[5]。
1.2.1 最大精确度指标
为了验证测试台架的最大精确度,首先在低黏着条件下进行有效的轨道线路防滑试验,然后与在防滑测试台架上进行的相同试验进行对比。上述这些试验是从各试验结果中随机取样得到的。防滑测试台架上安装的防滑系统应与轨道线路试验中使用的相同,仿真器采用数学模型进行模拟,并考虑在轨道试验中所使用车辆的机械性能。为了对所选定试验进行精确模拟,可以对黏着模型进行参数标定。
最大精确度指标定义为仿真试验与轨道试验的相关指定数值之间的误差百分比,可以表示为式(1):

式(1)中精确度根据以下指定的数值进行计算:
(1)制动距离:从制动开始到车辆停止的距离。
(2)制动时间:从制动开始到车辆停止的时间。
(3)初始黏着:开始滑行时的初始制动减速度。
(4)车辆所有轮对的最小滑行率的平均值。
除了第4 个数值可容许6%的精确度外,其他数值的精确度应在5%以内。
1.2.2 可重复性指标
防滑测试台架应能复现在轨道试验误差范围内的现车情况,可根据4 次有效的轨道线路试验结果来计算1.2.1 节中的每个指定数值的平均值和标准误差。
根据模拟的黏着系数特性以及车辆参数,将相同的试验在测试台架上重复10 次,并计算这10次试验的每个指定数值的平均值和标准误差。
对于仿真试验中的每个指定数值的平均值,应在轨道试验平均值±标准误差的范围之内,可表示为式(2):

式中:emean_track为轨道试验的平均值;σtrack为轨道试验的标准误差;emean_sim为仿真试验的平均值。
可重复性指标定义为式(3),仿真的每个指定数值的可重复性指标见表1。

表1 可重复性指标值

2 防滑测试台架系统结构设计
依据UIC 541-05 标准规定的1 类防滑测试台架的结构和功能要求,在前期高速动车组防滑控制系统的设计、开发、测试和试验的基础上,提出了一种满足UIC 标准要求的防滑测试台架的设计方案。根据UIC 防滑标准要求和实际需求情况,防滑测试台架除了黏着模型和动力学模型外,其他部分都采用实物搭建,包括轴速模拟单元、空气制动模拟单元、信号处理单元、仿真计算单元和WSP 测试设备等组成,其核心组件是仿真计算单元,各组成部分独立工作,形成了一套闭环试验系统[3,6],如图2 所示。
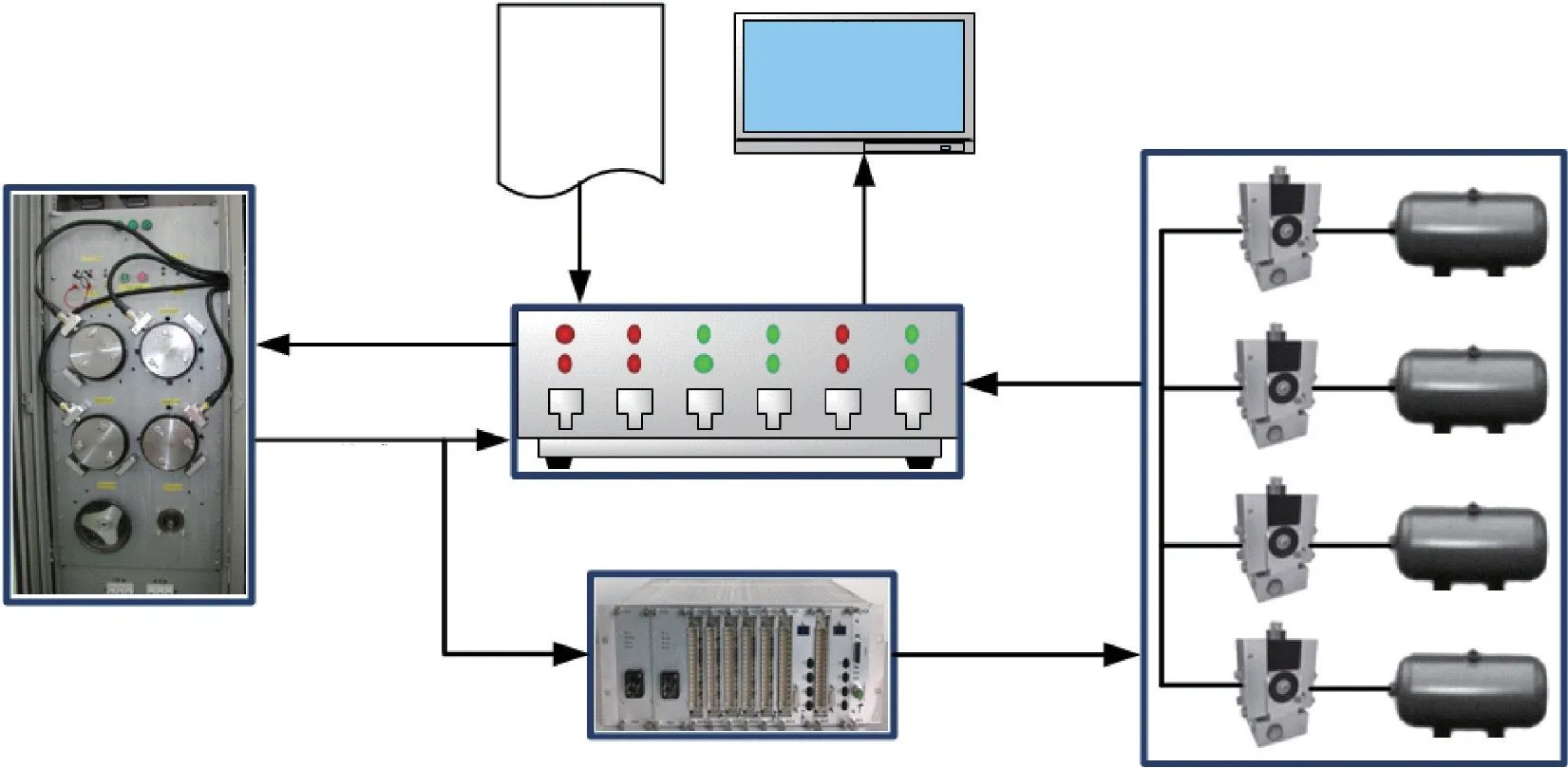
图2 防滑测试台架系统结构
仿真计算机运行的程序包括轨道条件以及要模拟的测试车辆信息,测试车辆可以是机车、客车、动车组、高速列车等不同的车型。仿真程序提供黏着曲线和在模拟轨道上的制动标识。当程序加载时,仿真计算机发送1 个控制信号到轴速模拟单元,使轴速转动加速。当模拟的制动标识激活时,轴速减慢以模拟制动过程。在每个旋转的车轴上安装速度传感器以读取速度信号,并分别发送给仿真计算机和WSP 控制器。WSP 控制器根据轴速信号和仿真计算机提供的模拟地面速度偏差进行防滑控制,进而控制气动单元的防滑阀。防滑阀是排出空气压力,还是保持空气压力,条件取决于仿真计算机提供的车轮速度。每个制动缸的空气压力也由仿真计算机读取和保存,并用于后台的仿真及计算。测试运行的制动距离将与所有其他数据一起保存,仿真计算机可显示所有追踪的信号,并可打印成数据图表的形式。防滑测试台架的总体功能如图3 所示。
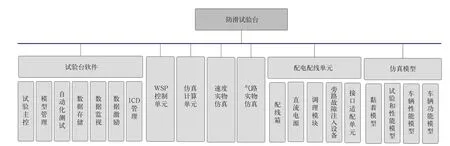
图3 防滑测试台架总体功能
2.1 实时仿真机
防滑测试台架由运行在多处理器硬件平台上的实时软件控制,实时软件运行在上位机中,完成试验台的人机交互等工作,包含试验主控、模型管理、自动化测试、数据存储、数据监控、数据激励、ICD 管理等。对于不同的应用条件,仿真机的电气I/O 接口应较易配置。仿真机主要包括实时处理器、电气I/O 接口、信号调理单元、通信接口、FPGA模块、故障注入单元(FIU)、电源及连接线等。
2.2 WSP 控制单元
WSP 控制单元是仿真测试台架的被测试对象。WSP 控制单元检测车辆轮对的滑行状态,并通过控制防滑阀来调节制动缸内部压力,防止轮对抱死,并充分利用轮轨黏着,最大限度地缩短制动距离。
2.3 轴速模拟单元
轴速模拟单元包括电动机、速度传感器、I/O电气接口等,电动机的速度值由仿真计算机模拟给出。轴速模拟单元配备6 个电机系统可模拟最多6 组轮对速度,每个轮对配有1 个电流型(或电压型)速度传感器,每个轮对安装1 个脉冲齿轮,脉冲由WSP 速度传感器获取,并传输到WSP 被测设备和仿真计算机。
2.4 气动单元
气动单元是被测试防滑系统的动作执行机构,包括防滑阀和其他气动设备(制动风缸、中继阀、制动缸、压力传感器以及管路和电气连接线缆等)。WSP 控制单元控制防滑阀来调节制动缸内部压力,其动作响应受制动系统气动部件的影响。压力传感器实时检测制动缸压力并传输到实时仿真机,实时仿真机根据制动缸压力来计算下一个周期的车轮动态特性变化。
2.5 仿真模型
仿真模型的设计应综合考虑结果的精确性和可用计算资源之间的匹配。为了模拟不同类型的轨道车辆(例如:具有不同制动系统、轮对、动拖车等),仿真模型必须参数化。为了满足仿真模型的参数化要求,仿真模型可设计成不同的模块子系统,如机械系统、轮对系统、制动系统、黏着模型等。仿真模型可以根据所模拟轨道车辆的机械特性和功能特点来计算车辆的动态特性。
3 仿真模型设计
3.1 黏着模型
轮轨黏着系数是影响轮轨动态行为的核心参数,但目前轮轨之间的瞬时可利用黏着系数是无法实时直接测量的,因此需要通过数学建模来模拟。黏着模型曲线可基于理论模型或实际轨道测量数据。黏着曲线应包括随着车轮滑行而变化的黏着最大值[7]。
根据标准要求,低黏着试验过程中的黏着值μ在0.05~0.08 之间,极低黏着值不超过0.03。此外,黏着模型应建立恒定和连续变化的黏着特性曲线。恒定黏着不随滑移速度的变化而变化,是一条恒定水平曲线。连续变化黏着特性曲线应表示不同物理介质的黏着系数,如:水、皂水、润滑剂、树叶或油等[8]。文中的黏着曲线模型设计如下:
(1)恒定黏着曲线
恒定低黏着系数设定为0.05、0.06、0.07、0.08这4 个,恒定极低黏着系数设定为0.02,恒定干轨黏着系统设定为0.16,分别表示如下:

(2)连续变化黏着曲线
连续变化黏着曲线也设定4 条曲线,分别表示水、皂水、润滑剂、树叶或油等物理介质的黏着系数,制动初始黏着系数都设定为0.02,黏着系数曲线分别表示如下:

恒定黏着曲线和连续变化黏着曲线如图4所示。
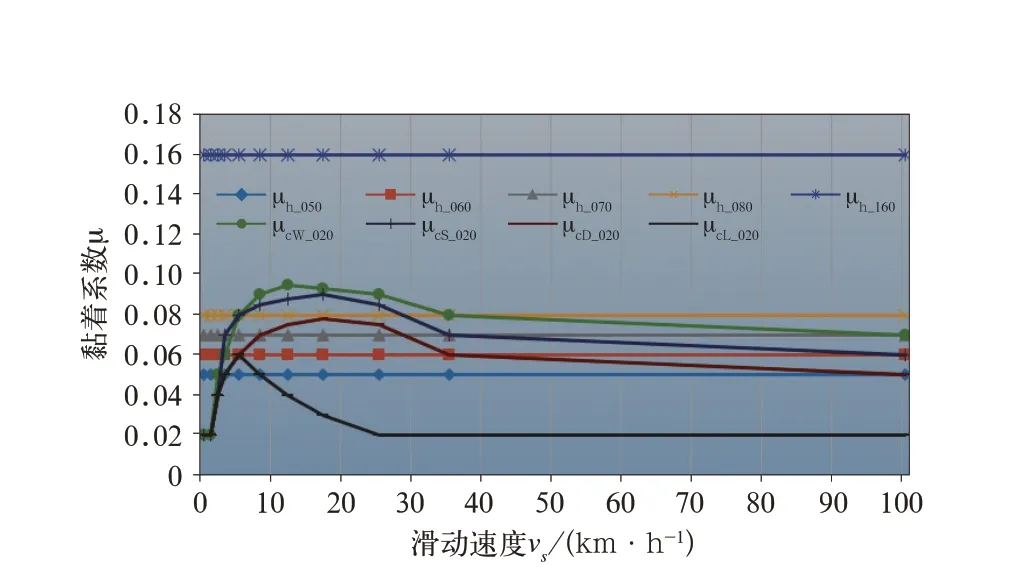
图4 仿真黏着特性曲线
(3)黏着力计算
黏着系数特性曲线确定之后,即可得到黏着力为式(4):

3.2 摩擦模型
摩擦模型用于计算每个轮对的摩擦制动力,表示成摩擦制动力和制动缸压力的对应关系[9],计算过程如下:
制动缸力,如式(6):
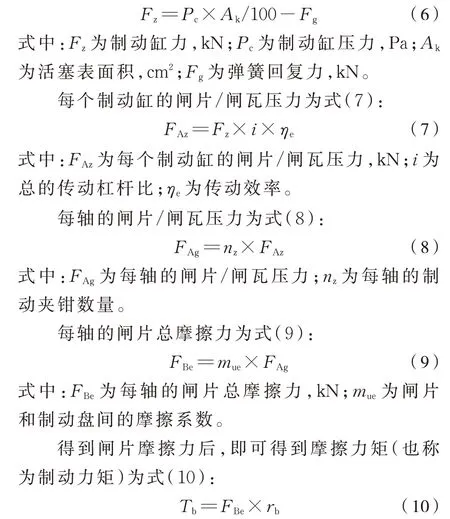
式 中:Tb为 摩 擦 制 动 力 矩,kN⋅m;rb为 制 动 半径,m。
3.3 旋转动力学模型
轮轨黏着制动过程如图5 所示,符号说明见表2。在车轮转动过程中,当施加制动时,闸片作用于制动盘的垂直压力K引起闸片作用于制动盘的正向滑动摩擦力K×ϕ。由于轮对紧压在钢轨上,因此由闸片产生的滑动摩擦力K×ϕ对轮心的逆时针方向的制动力矩,在轮轨接触点又产生钢轨反作用于车轮的切向静摩擦力B,这个力就是由制动系统产生的与列车运行方向相反的外力,也就是制动力Fb。
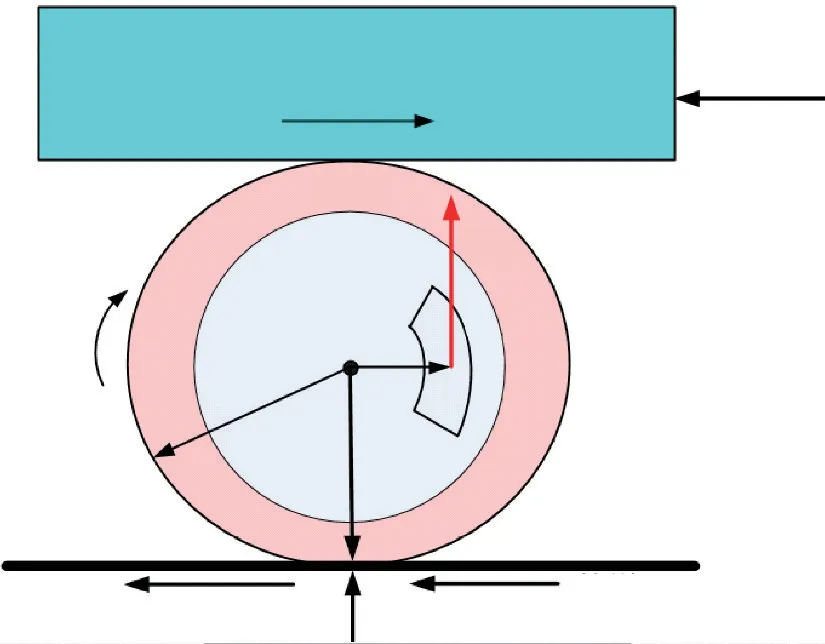
图5 轮轨黏着制动过程示意图
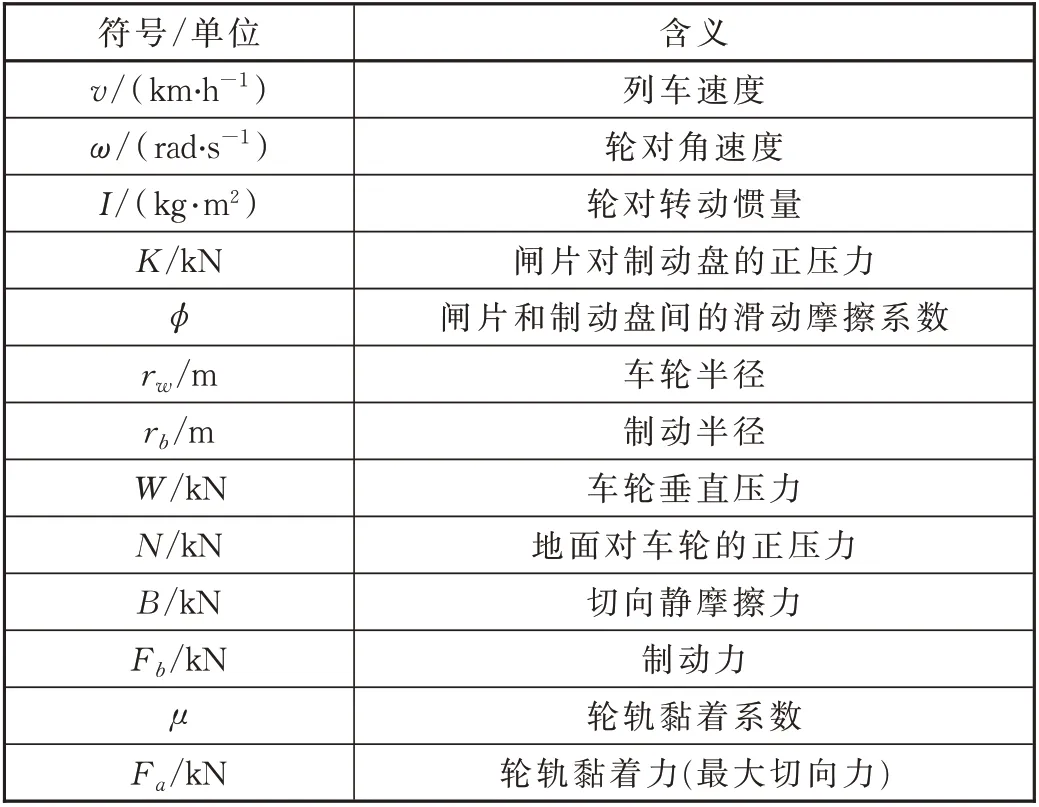
表2 轮轨黏着符号说明
在轮轨间保持静摩擦和忽略车轮转动惯性I的情况下,制动力Fb计算为式(11):

根据图5,当制动施加后,制动缸压力逐渐上升,进而闸片摩擦力和摩擦力矩也随之增大,轮对速度开始下降,轮对速度和车辆速度之差也逐渐增大,蠕滑率和黏着系数增大。在蠕滑率达到最大黏着值之前,黏着系数随蠕滑率的增大成非线性的增加,此时可认为制动力矩和车轮转矩是同步增长的,则制动过程处于黏着曲线的稳态运行区。如果此时继续增大制动力矩,当蠕滑率超过某一值时,黏着系数不增反降,车轮转矩也随之减小,导致与制动力矩的差也急剧增大,最终使轮对速度快速降低直至轮对抱死[10-11]。
在车辆制动过程中,轮对转矩和制动力矩的动态特性描述为式(12):
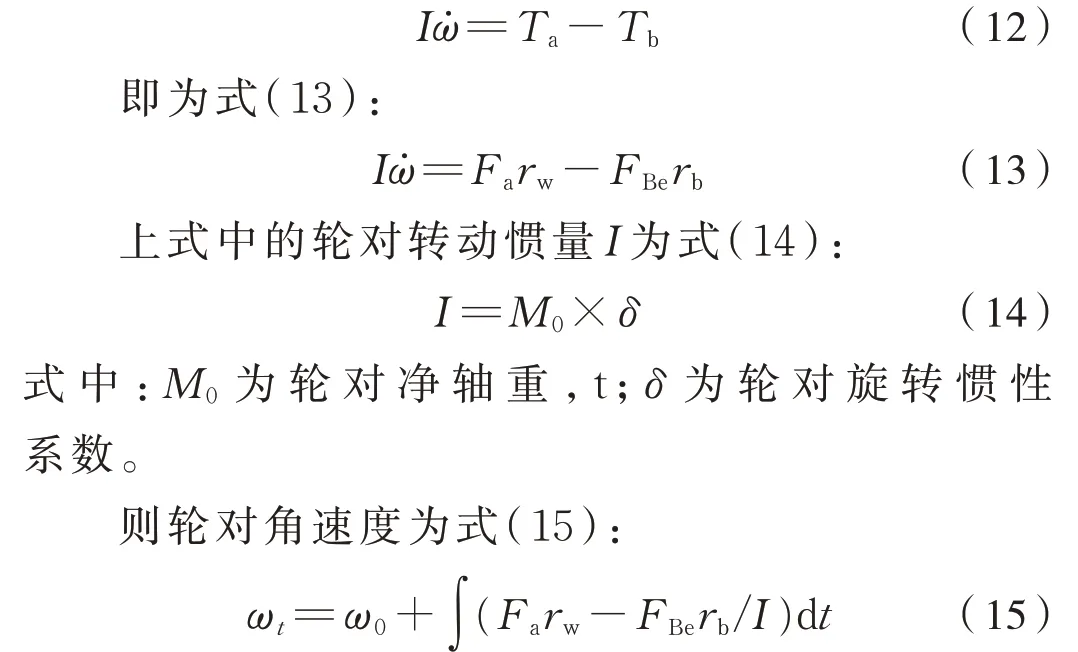
式中:ω̇为角加速度,ω0为初始角速度,ωt为t时刻的角速度。
根据角速度即可计算出轮对线速度为式(16):
式中:g为重力加速度。
根据式(15)和式(16),可计算出轮对的滑动速度vs为式(22):

根据上述所建立的模型,即可仿真实现轮对的动态特性闭环控制。
3.4 试验控制模型
试验控制模型实现2 个功能:
(1)根据试验项目和试验条件的要求,设定车辆参数和环境参数。
(2)对试验数据进行处理及对结果进行判定。
需要设定的车辆参数包括:车轮轮径;动轴/拖轴;车重/轴重;车轮转动惯量。
需要设定的试验参数包括:制动初速度和停止速度;制动减速度;坡道斜度。
每次试验过程中需要处理的试验结果包括:制动距离;滑行过程/轮对抱死;防滑阀工作状态。
4 结 论
防滑测试台架是测试和验证防滑系统功能和性能的常用方法之一。文中系统梳理了国际防滑标准UIC 541-05 对防滑仿真测试台架的设计要求和验证要求,在此基础上设计了防滑测试台架的系统结构和功能结构,并详细分析了防滑仿真模型的计算方法。下一阶段的工作是依据文中所提出的防滑测试台架设计方案,基于前期高速动车组制动防滑系统设计和开发经验,搭建防滑测试台架,为防滑系统的研发、测试和验证提供有效手段。