基于LiDAR点云测量技术的沙盘模型数字化设计
2021-11-19廖婧林遵豪
廖婧 林遵豪
1.福建师范大学协和学院;2.福州职业技术学院文创产业虚拟现实与可视化应用技术协同创新中心
由于传统数字化沙盘模型不能准确提取沙盘结构特征,导致数字化沙盘模型的精度不高,为此,研究基于LiDAR点云测量技术设计数字化沙盘模型。通过提取沙盘结构特征,掌握沙盘整体结构,采用滤波算法实现点云数据分类,利用LiDAR点云测量技术构建沙盘数字化模型。实验结果表明,与传统数字化模型相比,设计的数字化模型展示出的建筑边界斜率误差值为0.1度,传统数字化模型展示出的建筑边界斜率误差值为1.02度,设计的数字化沙盘模型显示的数据更加准确,有效提高了数字化沙盘模型的精度。
0 引言
LiDAR点云测量技术采用的都是3D点云格式,能够直接和主动测量出目标数据,并且受外界的影响较小,所测的数据精准性较高。LiDAR点云测量技术具有很多优势,比如能够实现不仅可以动采集、实时采集,过程,能够实时采集和处理测量点,也可以多次记录回波数据和回波强度,它已经构建了一个标准化数据结构,能够有效实现资源共享,也能够还可以实现大区域测量。沙盘模型能够对系统和事物的信息一些情况进行表达。将需要表达的事物进行缩小或者放大制作成一个样品,沙盘模型就是这个样品,能够给人更直观的表达,沙盘模型分为地形地貌沙盘模型,建筑沙盘模型,场景沙盘模型。沙盘模型数字化就是使用沙盘模型的各个环节都采用数字化技术处理沙盘模型,将沙盘中复杂的信息转化为数字和数据,把这些数字和并对数据进行处理,得到最终想要的信息,数字化是沙盘模型的基础。由于我国数字化沙盘模型还处于发展阶段,沙盘模型融入的数字化技术相对比较落后,本文研究基于LiDAR点云测量技术设计的沙盘模型数字化方法能够有效提取沙盘模型各环节的数据,保证了数据的精确性。
1 基于LiDAR点云测量技术的沙盘模型数字化设计
1.1 提取沙盘结构特征
基于LiDAR点云测量技术的沙盘模型数字化设计,首先需要提取沙盘结构特征。不同沙盘类型具有不同的结构特征,反映出来的信息也不同。沙盘模型的类型有很多,包括建筑沙盘,场景沙盘和地形地貌沙盘。需要选取建筑沙盘模型进行结构特征研究和分析。分析建筑沙盘的结构特征。沙盘模型是一个实物模型,而数字化沙盘模型是利用计算机形成的一种虚拟模型,能够通过电脑画面展示出来。实物的建筑沙盘模型由于建筑类型和建筑特点的不同,构建所使用的沙盘材料也不同,不同类型的建筑沙盘模型可以适用于多种建筑施工场合[1]。建筑沙盘模型是将建筑的造型和周边环境关系采用微缩实体的方法进行表示,在进行建筑设计时,沙盘模型可以反映建筑设计的理念和建筑分区功能,建筑沙盘模型适用于各种建筑类工作,利用沙盘模型能够有效展示建筑的整体规划。提取沙盘结构特征是实现数字化沙盘模型的基础,建筑沙盘模型是实物建筑缩小的样本。沙盘的结构特征就是整个建筑的结构特征,它能够有效反映出建筑结构的特点。承重结构和围护结构是建筑结构的两大主要结构,并且使用的建筑材料也不同,沙盘模型需要采用不同材料展示建筑的承重结构,维护结构和建筑材料特点。数字化沙盘模型能够将实物沙盘模型的结构特征用数据和数字来表示,利用可视化技术转化为图形模式,用图像的形式展示整体实物建筑,有效展示建筑的一切信息[2]。
1.2 滤波算法分类点云数据
建筑沙盘模型的结构特征信息就可以用点云数据进行表示,点云数据就是一组向量集合,能够在三维坐标系中体现出来,能够用点云数据代表物体外表形状和颜色信息。大多点云数据是通过激光雷达和立体摄像头等多种3D扫描设备获取得到的,能够有效检查建筑质量和结构的合理性。由于建筑结构特征的不同扫描出来的点云数据类型也会不同,我们可以根据点云数据产生的滤波进行分类[3]。采用滤波算法能够将不同类型的点云数据进行分类,并且可以处理点云数据,滤波算法的类型具有多样性,不同类型的滤波算法都有一定的优点和缺点,滤波算法类型包括有简单滤波算法,移动窗口滤波算法,基于地形坡度的滤波算法和基于曲率的LiDAR点云数据剖面滤波算法等多种滤波算法,我们将选取基于曲率的LiDAR点云数据剖面滤波算法对点云数据进行分类处理。我们首先将收集回来的云点数据进行格式化,形成一个离散点云棚,设置网格间距,让点云数据之间有一定的间距,适合的间距能够保障数据的精准性和运算的稳定性,建立一个不规则三角网,保证云点数据的间距。由于传统的云点数据分类处于一种半自动化模式,基于曲率的LiDAR点云数据剖面滤波算法是一种能够精度识别的自动化分类算法,能够实时识别云点数据类型,选用两组点云数据,计算出两组点云数据的最大方差值,把方差值作为分类处理的基础,如公式(1)所示。

在上述公式中,θ表示两组点云数据的方差值,t表示两组数据的期望值,r1、r2分别表示两组点云数据的均值,e1、e2分别表示两组数据的目标概率。根据两组类型的点云数据能够自动确定处理阈值,最终的阈值可以用公式(2)表示。

在上述公式中,F表示点云数据处理阈值。每一组类型的云点数据之间都有一个合适的阈值,把测量的整体目标划分为多个区域,计算每一个区域的特征值,根据区域的特征值得到数据之间的方差值。我们将测量区域分为多个小区域,从区域结构中采集原始点云数据,利用三角网划分点云数据间距,获得点云数据的三维坐标,利用滤波算法处理点云数据,进行迭代计算,最终过滤完区域内所有的点[4]。
1.3 基于LiDAR点云测量技术生成数字化沙盘模型
基于LiDAR点云测量技术生成的数字化沙盘模型,能够精准测量出实物目标产生的数据,能够有效保证数据的精确性,为构建数字化沙盘模型提供了基础条件。沙盘模型能够体现建筑的整体性,建筑结构以及周围环境特征比较复杂时,传统的测量技术不能够有效准确地提取特征数据。我们设计一个大型的数字化沙盘模型时,不仅要考虑到实体建筑的结构特点,还需要分析建筑与周围环境之间的关系,设计的难度系数相对比较大,我们需要对不同的区域进行分隔,LiDAR点云测量技术能够有效实现点云参与多尺寸分割。LiDAR点云测量技术可以发射信号波,根据信号波判断建筑特征信息,不同颜色的信号波表示不同类型的信息[5]。精准的数据信息是构建数字化沙盘模型的基础,基于LiDAR点云测量技术能够保证数据的精准性,提高了点云数据的分辨率。我们采用点云测量技术进行分隔时,首先确定最优分隔尺度,最优分隔尺度表示的是一个合理的尺度范围,具有相应的尺度域值。最优分隔尺度域值表达形式如公式(3)所示。

在上述公式,G表示区域最优分隔尺度范围,G1表示区域对象内部结构标准差指示的最优分隔尺度范围,计算出的区域与邻近区域均值差分绝对值的最优尺度范围值用G2表示,分形维数的最优尺度范围用G3表示。合理的区域分隔尺度,可以合理分配数据流量,有利于提高数据提取的效率和质量,利用点云测量技术将采集回来的数据转化为三维可视图,从而在此基础上建立一个数字化沙盘模型[6]。数字沙盘模型如图1所示。
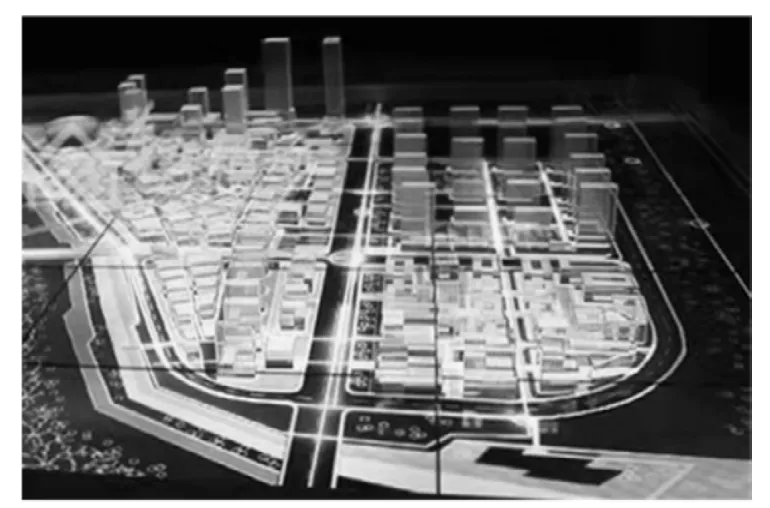
图1 数字化沙盘模型Fig.1 Digital sand table model
基于LiDAR点云测量技术生成的数字化沙盘模型更能够直接观察出建筑的整体结构特点,采用影像辅助边缘化处理技术,加强对建筑边缘数据的提取,确保数字化建筑沙盘模型的精准性,数字化沙盘模型最终以三维可视化影像呈现出来。
2 实验与分析
2.1 实验准备
为了检验基于LiDAR点云测量设计的数字化沙盘模型效果,展开实验,首先选择性能较好的实验设备,给实验提供一个稳定的测试环境。为了获取更加真实有效的实验结果数据,一共选取9个建筑区域,对这9个建筑区域的特征数据进行反复提取,直至得到最优数据结果。将建筑物边界的斜率作为实验变量,测出建筑边缘的实际斜率,分别用Z1、Z2、Z3、Z4、Z5、Z6、Z7、Z8、Z9表示这9个建筑区域,9个建筑区域的基本信息如表1所示。
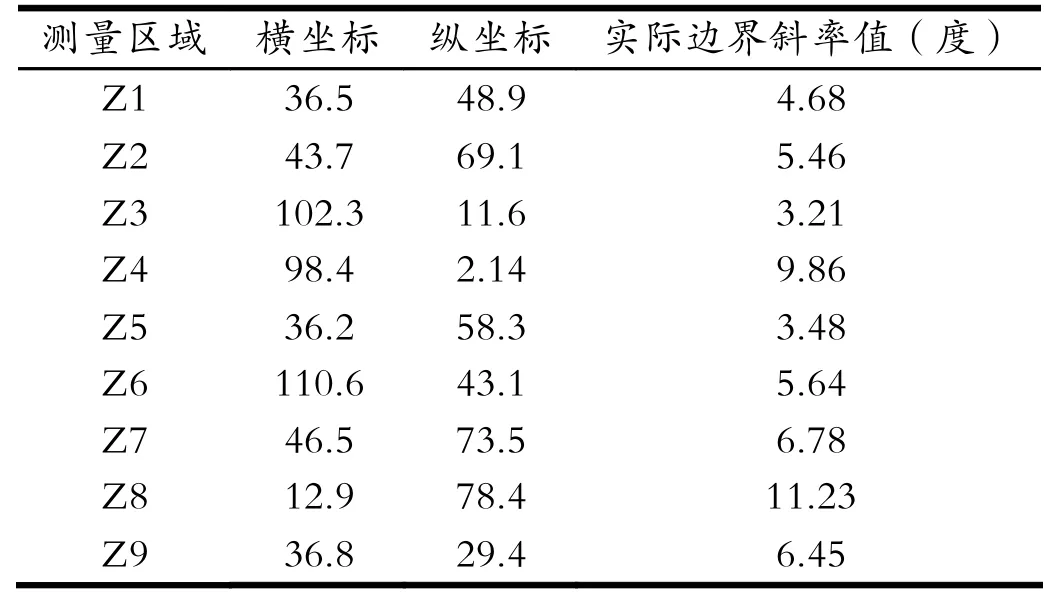
表1 建筑基本信息Tab.1 Basic building information
根据表1我们了解到了不同建筑区域的坐标位置和实际边界斜率值。基于LiDAR点云测量技术构建的数字化沙盘模型和传统数字化沙盘模型分别对这9个建筑结构特征进行展示,分析两种数字化沙盘模型展示的效果,主要观察两种数字化沙盘对建筑边界斜率的展示,比较数字化沙盘模型的边界斜率结果与实际边界斜率结果的差值。
2.2 实验结果
数字化沙盘展示的建筑结构是按照一定的比例进行微缩实现的,确定好两种数字化沙盘模型比例,采用基于LiDAR点云测量技术构建的数字化沙盘模型和传统数字化沙盘模型进行实验测试,测出的边界斜率值如表2所示。
根据表2中显示的结果可知,本文数字化沙盘模型与传统数字化模型相比,传统数字化沙盘模型显示的边界斜率值均比实际边界斜率值偏大,只精准显示出Z2、Z4和Z9建筑区域的边界斜率值,比实际边界斜率值大了1.02度。采用LiDAR点云测量技术设计的数字化沙盘模型能够准确显示出8个建筑区域的斜率值,其中数字化模型中Z4建筑区域的边界斜率只比实际边界斜率少了0.1度,本文数字化沙盘模型展示的建筑结构数据精度更高。
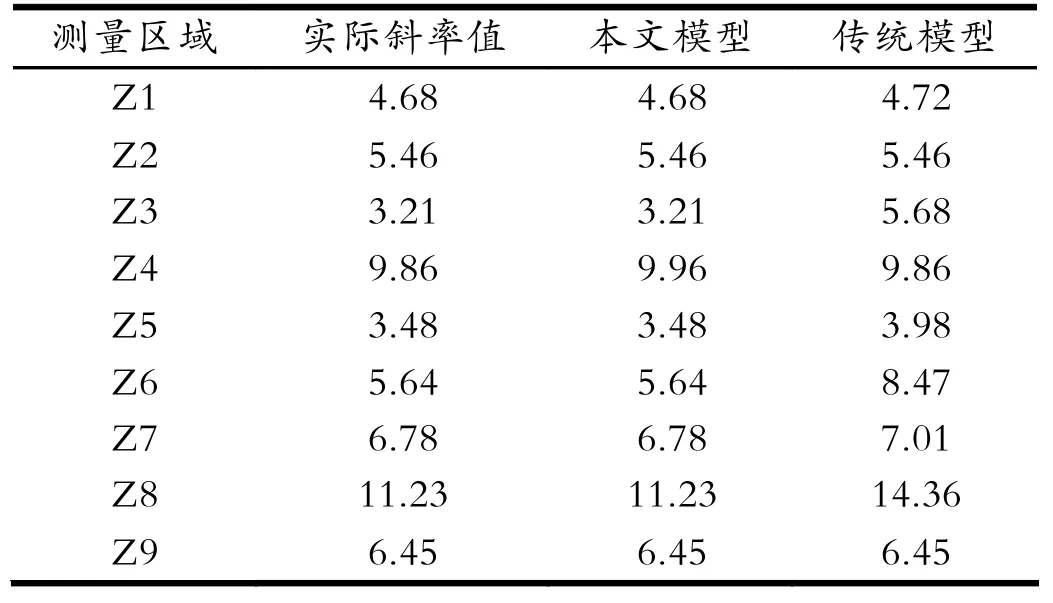
表2 建筑边界斜率值(度)Tab.2 The slope value of the building boundary (degrees)
3 结语
本文研究的基于LiDAR点云测量技术数字化沙盘模型,促进了沙盘模型的发展,LiDAR点云测量技术能够测出沙盘实物数据,提高了沙盘模型的精度和质量,使沙盘模型各个环节的数字信息都具有真实性,也加快了数字化沙盘模型建模的速度。虽然能够有效解决数字化沙盘模型建模速度和模型的精准性,但是对复杂事物进行数字化沙盘建模时,还存在很多问题,希望在下一次研究中,充分利用LiDAR点云测量技术,优化算法,对目标物数据进行反复提取,能够有效构建一个复杂事物数字化沙盘模型。
引用
[1] 陆定中,李立明.轨道交通沙盘模型的操作显示界面设计研究[J].现代职业教育,2020(45):166-167.
[2] 李满,邓峻权.三维校园景观沙盘模型新形式的探索与应用:以广州工商学院部分建筑景观为例[J].现代信息科技,2020,4(13):89-91+94.
[3] 宫岩.机载LiDAR点云数据质量检查方法[J].北京测绘,2020,34(9):1258-1261.
[4] 张炜锴,郑加柱.LiDAR点云的地铁站三维模型建立[J].建设科技,2019(21):43-47.
[5] 周成玲,王煜,胡来宝,等.沙盘模型在园林设计类课程中的应用探讨[J].现代农业科技,2019(13):234-235+237.
[6] 王广帅,万一,张永军.交叉点结构特征约束的机载LiDAR点云与多视角航空影像配准[J].地球信息科学学报,2020,22(9):1868-1877.
