芜湖跨座式单轨交通信号系统应用方案及关键技术创新
2021-11-18王力
王 力
(中铁工程设计咨询集团有限公司,北京 100055)
芜湖是国内首个全网建设跨座式单轨交通的城市,相较于已开通运营的重庆单轨,芜湖跨座式单轨交通主要适应中低运量客流,可满足中小城市轨道交通建设需求[1]。
信号系统担负着指挥列车运行、保证行车和乘客安全、提高运输效率的重要任务[2]。国内跨座式单轨已运营项目为重庆轨道交通2 号线、3 号线,2 号线一期工程于2005 年6 月开通运营,3 号线一、二期工程于2011 年底开通运营,开通运营距今已有较长时间。信号系统采用当时较为先进技术,但难以满足目前跨座式单轨信号系统建设的新需求。针对芜湖轻型跨座式单轨交通建设需求[3],开展信号系统部分关键技术创新,确保信号系统先进性,并为安全运营提供保障。
1 国内跨座式单轨交通信号系统应用现状
1.1 重庆2 号线
重庆2 号线采用日信公司的ATP/TD 环线,为速度码方式的固定闭塞制式系统。根据牵引计算结果,将线路划分成固定的闭塞分区,并在轨道梁肩部预埋每个闭塞分区的TD 环线。TD 环线接收来自车头及车尾发出的TD 信号,用以确定列车的位置。系统根据TD 环线中列车位置以及列车前方空闲的区段数,列车的停车点等信息,确定列车的速度等级,并通过TD 环线向列车发送速度码,从而实现对列车实施连续控制和列车安全间隔的控制[4]。
车辆段仅采用TD 环线检测列车位置,而不向列车发送ATP 码。在车辆段内按照地面信号机的显示行车,采用限速人工驾驶模式。在信号机前方通过环线向列车发送M 码,实现防误出发功能。重庆2 号线南延线信号系统采用国内大成公司的ATP/TD 环线系统。
1.2 重庆3 号线
重庆3 号线正线采用了日立公司基于无线通信的移动闭塞(CBTC)系统,为保证CBTC 系统故障下列车具备运行能力,设置了联锁级降级模式[5],列车位置检测采用计轴设备。计算机联锁和ATS 子系统均采用国产设备(交大微联和铁科)。CBTC 系统原理配置与钢轮钢轨制式完全相同,只是在轨旁及车载设备安装和使用方式上有所不同。
车辆段采用计轴作为车辆占用检测设备[6],以地面信号机显示行车,采用人工限速驾驶模式。在出入库以及咽喉区设置有源应答器,实现列车的防误出发功能。
2 芜湖跨座式单轨交通信号系统建设需求
2.1 工程概况
芜湖轨道交通先期建设项目为芜湖1 号线、2 号线一期工程。1 号线全长30.460 km,全线高架敷设,共设车站25 座,设有车辆段及停车场各1 座;2 号线一期全长15.787 km(地下线长1.409 km,地面及高架线14.378 km),共设车站11 座(高架站10 座、地下站1 座)及车辆段1 座。设置全网5 条线路共用的控制中心1 座,负责各线路运营调度指挥。正线困难地段线路最大坡度60‰,最小曲线半径50 m。轨道梁为30 m 跨度的连续钢构PC 轨道梁,整体梁型道岔;单轨车型为庞巴迪INNOVIA Monorail 300 系(无人驾驶列车);供电采用DC750V 接触轨侧面受流方式。
2.2 运营组织需求
线路为双线,右侧行车。全线运营时间为5:30~23:30,全天共计运营18 h,其余时间用于线路维护和设备检修。列车最高运行速度为80 km/h,列车旅行速度35 km/h。1 号线初、近、远期均为6 辆编组,2 号线初期为4 辆编组,近、远期为6 辆编组。1 号线、2 号线远期高峰小时最大列车开行对数分别为30 对、28 对。
2.3 系统功能需求
(1)系统基本功能需求
为适应运营组织需求,信号系统应包括以下基本功能。
①保列车安全运行
为列车提供安全进路,确保列车安全间隔,确保列车移动速度,提供移动授权,监督列车移动等。
②列车自动驾驶
确定运行曲线,根据运行速度曲线控制列车运行,车站定点停车等。
③监督轨道
防止列车与障碍物相撞,防止列车与站台进入轨道区域人员相撞,保护轨道上的作业人员等。
④监督乘客乘降
控制列车门和站台门,防止乘客掉落在站台与列车间隙受伤,确认列车启动条件等。
⑤列车运行管理
管理列车驾驶模式,管理车辆段和停车区,改变列车运行方向,监督列车状态等。
⑥运营调度管理及监督
时刻表管理,管理人机交互界面,维护管理等。
⑦适应救援方式
适应动力牵引列车救援和地面救援等方式[7]。
(2)系统特殊功能需求
已建成的重庆跨座式单轨采用日立技术,而芜湖跨座式单轨基于庞巴迪技术进行国产化技术创新,在车辆、道岔、轨道梁等核心技术方面与重庆单轨有一定差异(见表1)。芜湖跨座式单轨应用了全自动运行技术,使信号系统较重庆跨座式单轨在一些特殊功能需求上存在一定差异,信号系统主要功能差异见表2。此外,由于车辆制式差异及道岔控制通过轨旁道岔控制柜实现等原因,结合轨道梁及道岔设置情况,信号系统还需合理确定轨旁设备安装方式,做好与道岔控制系统接口[8]。

表1 芜湖与重庆跨座式单轨核心技术差异
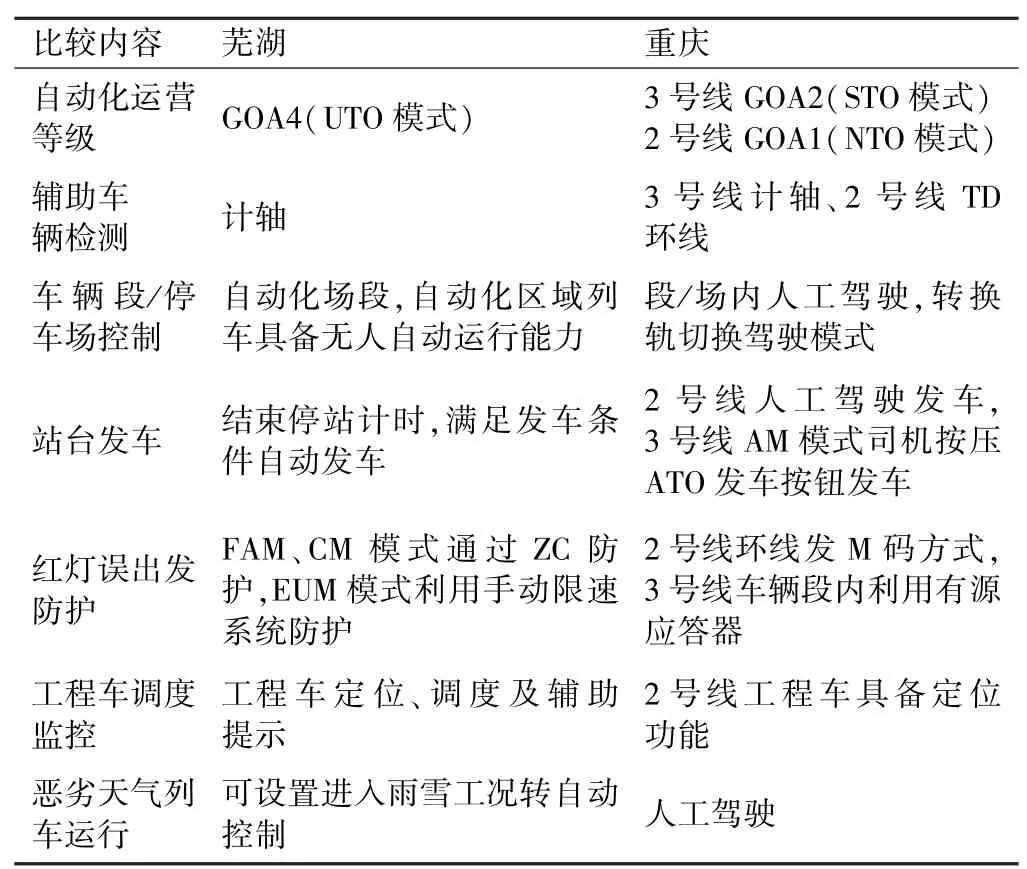
表2 芜湖与重庆跨座式单轨信号系统主要功能差异
3 芜湖跨座式单轨信号系统应用方案
3.1 信号系统总体方案
芜湖跨座式单轨信号系统采用基于通信的列车自动控制系统(CBTC)制式,正线与车辆段/场一体化设计,应用新誉庞巴迪公司CITYFLO 650 系统。系统运营自动化等级按满足GOA4 级设计,可实现UTO(无人值守列车自动运行)等级下列车全自动无人驾驶。CITYFLO 650 系统主要由ATS(列车自动监控)、ATP(列车自动防护)、ATO(列车自动运行)、CBI(计算机联锁)、DCS(数据通信)和MSS(维护监测)6 个子系统组成。
CBTC 系统降级采用联锁级控制方式,主要由地面信号机、计轴设备与联锁设备共同构成基本降级系统。正常运行模式下,正线室外信号机点灯[9]。
信号系统车地通信采用TD-LTE 技术,利用一套LTE 设备综合承载CBTC、PIS/CCTV(紧急状态下)、车辆、紧急报文(紧急状态下)和车载调度系统信息。
信号CBTC 系统驾驶模式包括FAM(全自动模式)、CM(ATP 监督下的人工驾驶模式)和EUM(全人工模式)[10]。
信号系统信息安全防护按等级保护(三级)基本要求,考虑全方位的技术防护措施[11]。
3.2 系统构成
(1)ATS 子系统
ATS 子系统为分布式监控系统,分别在控制中心、备用控制中心、一级设备集中站、二级设备集中站、非设备集中站、车辆段/停车场、试车线以及培训中心设置相应的ATS 设备,系统设备通过DCS 系统连接,构成一个高度智能的自动化网络行车调度系统。系统对关键设备(如CTC(服务器、TMS 服务器、本地ATS 服务器、网关计算机、调度工作站和列车控制工作站等),均采用双机热备或集群配置的冗余方式,以保证系统可靠性。
(2)ATP 子系统
ATP 子系统主要由RATP(轨旁ATP)及VATP 组成(车载ATP)。RATP 设备主要包括在每个一级设备集中站设置的“2 乘2 取2”安全冗余结构的区域自动控制器(ZC),控制中心设置了RRS(区域恢复服务器)。每列车在车头车尾分别配置1 套车载VATP 设备,2 套VATP 共同构成“2 乘2 取2”的安全冗余结构。除车载显示屏外,当主设备故障时会自动切换到备用设备(为无扰切换),不影响列车正常运行或司机正常驾驶。
(3)ATO 子系统
ATO 子系统主要由RATO(轨旁ATO)及VATO组成(车载ATO)。RATO 子系统设备位于一级设备集中站、车辆段/停车场的RATO 机柜内。RATO 子系统采用热备冗余结构。每列车在车头车尾分别配置1 套车载ATO 设备,2 套VATO 共同构成热备冗余。
(4)CBI 子系统
联锁子系统采用EBI Lock 950 型全电子计算机联锁系统,主要由联锁主机和目标控制器(OC)组成。联锁主机设置于一级设备集中站,目标控制器设置于一级集中站和二级集中站。联锁主机采用“2 乘2 取2”安全冗余架构,目标控制器(OC)通过全电子执行电路,直接连接信号机、计轴和紧急停车按钮等轨旁控制对象,以采集设备状态,并对其进行控制。
(5)DCS 子系统
数据通信子系统(DCS)是一个专有通信系统,由数据传输系统(DTS)、车地通信系统(TWC)及网络管理系统(NMS)构成。DCS 子系统在各设备之间通过有线网络和无线网络实现双向通信,用以提供各设备子系统之间的有线信息传输以及地面设备与车载设备之间的无线信息传输。
(6)MSS 子系统
维护监测子系统(MSS)由维修中心、正线、控制中心、车辆段/停车场的维护监测设备组成,主要包括:维修服务器、维护工作站、信号集中监测设备、打印机和交换机等设备。
3.3 系统功能
(1)ATS 子系统
ATS 子系统可实现列车运行自动追踪、调整,列车运行时刻表管理及自动调整,系统设备监视以及对运行图的管理功能,以实现行车指挥自动化管理。具体功能包括:调度命令操作及显示管理、列车识别号管理、操作权限管理、自动进路排列、列车运行调整、车辆段自动运行、时刻表管理、车辆调度、系统监控与诊断和排班控制等。
(2)ATP 子系统
ATP 子系统可实现超速防护等控制列车运行的主要安全功能,由RATP 和VATP 共同实现。具体功能主要包括:列车初始位置确认、列车安全追踪、列车移动授权计算、临时限速、站台门状态监控、列车定位、超速防护、车门监督、列车完整性监督和列车自检等。
(3)ATO 子系统
ATO 子系统实现列车自动驾驶等非安全功能,由RATO 和VATO 共同实现。具体功能包括:站停时间控制、列车移除、通知列车下一停靠站、站台扣车/释放、车门和站台门联动控制、站台精确停车、自动对位调整和提供乘客信息系统触发命令等。
(4)CBI 子系统
全电子联锁系统是系统核心安全设备,通过轨旁设置的目标控制器接收联锁主机的命令,并控制轨旁对象(如信号机,道岔控制柜)动作,同时监视轨旁设备状态,并将其发送给联锁主机[12]。具体功能包括:进路排列/解锁、信号机控制、道岔控制、侧防和侵限保护、紧急关闭、车站扣车、区段封锁和系统报警显示等。
(5)DCS 子系统
DCS 子系统实现的功能主要包括:提供双向可靠的数据通信通道、对可能的无线干扰进行防护、提供网络安全防护、提供通信安全防护和网络管理等。
(6)MSS 子系统
MSS 子系统为全线信号设备的工作状态提供在线监控和实时报警,可帮助维护人员对报警与维护列表及报告结果导出进行统计和分析。具体功能包括:信号各子系统维护信息采集、轨旁基础设备状态及电气性能监测、报警及事件管理、数据处理及控制和维护信息终端界面显示等。
3.4 信号系统特色应用方案
(1)全自动运行
芜湖跨座式单轨采用庞巴迪INNOVIA Monorail 300 无人驾驶列车,车辆原来未设置司机室。全自动运行系统按具备UTO 功能建设,初期按DTO 模式运营。根据运营模式运用方案,车辆增加了可推拉的司机室隔断。
芜湖跨座式单轨供电方式为通过安装在轨道梁两侧的供电轨供电、回流,供电电压为DC750V。当全自动运行列车处于休眠状态时,车辆段停车库接触轨不断电,列车早间唤醒时间较全自动运行地铁线路短;车辆段未设置动态检测功能,列车不需进行向前和向后跳跃操作。
结合车辆制动性能和信号系统安全防护距离要求,双列位停车线尽头端距离车挡6 m,停车线两列车之间距离为13 m,停车库线长度较地铁全自动运行线路短;芜湖跨座式单轨列车TMS(列车管理系统)系统采用CAN 总线通信方式,在车辆网络故障或车辆网络和信号网络通信故障时,信号系统仍然能通过PWM 控制列车牵引制动运行,故未设置CAM(蠕动模式)模式。
(2)主要轨旁信号设备安装
跨座式单轨轨旁信号设备安装条件较地铁更为困难,轨旁信标与计轴等主要信号设备安装是工程应用需要重点解决的问题(见图1)。芜湖跨座式单轨采用低地板车辆,车辆底板至轨道梁面距离较重庆单轨小,受轨旁设备限界影响,轨旁设备安装方案与重庆完全不同。
重庆3 号线采用欧标应答器,应答器在桥墩安装。芜湖跨座式单轨采用了更加小型化的美式信标,安装于轨道梁侧面以避开接触轨。为使列车正反向运行均能读取信标,同一位置信标在轨道梁两侧均需安装;重庆3 号线计轴设备安装在轨腰,设置了套管和固定钢板作为计轴安装预埋件;芜湖跨座式单轨在车辆稳定轮加装了计轴感应钢板,计轴传感器安装于桥墩上,靠近轨道梁,传感器的上平面平行于轨道梁上表面,同时平行于车轮,探测车轮上的感应钢板,轨道模拟支架则靠近传感器支架安装。计轴设备安装示意如图1。

图1 芜湖跨座式单轨计轴设备安装示意
(3)全电子联锁
芜湖跨座式单轨正线及车辆段/停车场均采用全电子联锁设备,与传统的以继电器为接口电路的联锁系统相比,增加了系统的可用性、灵活性以及高可靠性,减少了信号设备占用机房面积。
全电子联锁系统设备主要包括联锁主机和目标控制器。联锁主机包括联锁处理单元、IPU(中央处理单元)、与维护终端接口连接实现维护/服务功能的接口。目标控制器(OCS),通过全电子执行电路直接连接轨旁控制对象,采集轨旁设备状态,并对其进行控制。全电子联锁系统构成见图2。
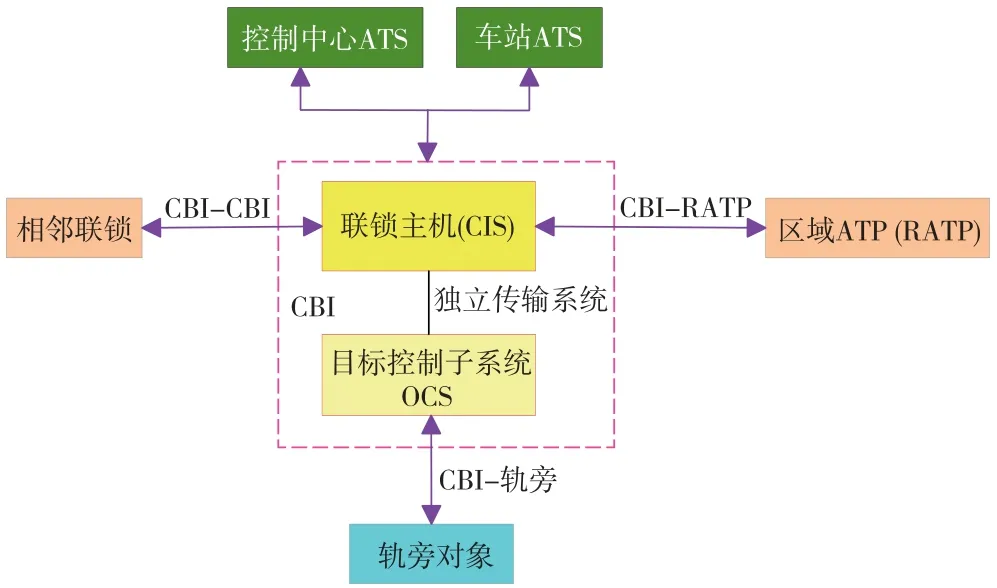
图2 芜湖跨座式单轨全电子联锁系统示意
4 芜湖跨座式单轨信号系统关键技术创新
4.1 跨座式单轨全自动运行
信号系统与通信、BAS、车辆、站台门等配合,在不同场景下完成特定功能,实现了UTO 等级全自动运行。全自动运行系统运营场景主要包括正常、故障、紧急3 类。相较于地铁全自动运行系统,其自动休眠、道岔故障和区间疏散等场景内容存在一定差异[13]。
结合全自动运行跨座式单轨车辆性能确定的双列位自动化场段停车库线长度较地铁更短,有效控制了土建建设规模。
4.2 开关门快速响应
应用站台门控制柜(PDCU),该设备完全独立于联锁和区域控制器,实现列车和站台门系统直接相互通信和安全判断,做到车停稳后,车门和站台门同时打开的时间小于1s,使乘客体验到全自动运行系统的流畅控制过程。
4.3 多类型工程车调度监控系统
单轨工程车作业任务复杂,非运营时段作业相对较多,当前完全依靠司机瞭望的目视行车方式,存在较大安全隐患[14]。芜湖跨座式单轨以北斗卫星为主要定位与测速手段,以专网LTE 为无线传输通道,建设安全可靠的单轨工程车调度监控系统,向司机提供完善的辅助提示功能,为工程车安全运行与高效调度提供技术支撑。
4.4 多个轨旁对象控制
信号系统采用全电子计算机联锁系统EBI Lock 950,联锁主机采用“2 乘2 取2”架构,与室外设备接口采用全电子化的目标控制器OCS,根据联锁主机控制容量,可以控制多达3 000 个目标点,控制距离达30 km 以上。目标控制器通过通信控制单元接收联锁主机命令报文,并转换为控制信号动作轨旁设备。同时,目标控制器检测轨旁设备状态和报警信息,通过通信控制单元,将检测到的信息提供给联锁主机。
4.5 单轨交通计轴设备应用
对于采用单轴转向架车辆的轻型跨座式单轨交通,克服了轨道梁设备安装条件严苛的困难,结合计轴系统电磁感应原理,将车轮传感器安装于桥墩上,实现信号系统降级情况下的车辆辅助检测。
4.6 综合承载车地通信系统
信号系统的数据通信DCS 子系统中车地无线承载系统采用基于3GPP 标准的LTE 无线移动通信技术建设[15],采用A/B 双网冗余架构设计,承载包括CBTC 列车运行控制业务的全线车地间综合业务。如有特殊要求,LTE 网络还可承载列车紧急文本下发业务、列车运行状态监测业务、车载视频监控业务以及紧急情况下的PIS 下传业务等。
5 结语
芜湖跨座式单轨交通信号系统应用了全自动运行技术、全电子联锁、站台门控制柜和LTE 无线技术,以及工程车调度监控系统,解决了项目建设中遇到的单轴转向架跨座式单轨车辆的辅助检测设备安装难题,通过以上多项关键技术创新,为芜湖轻型跨座式单轨交通的顺利开通运营奠定了基础,可为后续跨座式单轨交通建设提供借鉴。