具有运动补偿高精度海洋气象多参数模拟仪的研制
2021-11-17韩志安苏力日綦声波
刘 滨, 韩志安, 苏力日, 綦声波
具有运动补偿高精度海洋气象多参数模拟仪的研制
刘 滨, 韩志安, 苏力日, 綦声波
(中国海洋大学 工程学院, 山东 青岛 266100)
针对船舶气象仪的综合检查过程中检测周期长、人工排查效率低以及传统的自动气象站传感器信号模拟器的模拟精度低, 没有相关运动补偿算法导致此类系统不适应海洋船舶应用环境的问题, 对气象要素传感器的高精度信号采样电路、信号输出、软件滤波和运动补偿等方面进行了研究。通过分析传感器和船舶气象仪的原理, 设计了各个气象参数的采样电路、信号模拟电路、触摸屏、GPS和电子罗盘采样与模拟电路, 并在近海测试过程中进行了运动补偿模型测试, 并基于STM32微控制器进行了该仪器的系统检测实验。研究测试结果表明: 该系统具有低功耗、高可靠性、高精度的特点, 能应用于海上环境, 同时具有对船舶实时定位、气象要素实时模拟和采集、运动补偿多项功能。并且本系统精度在运动补偿后, 系统测量方差为0.019 3 m/s精度提高至接近真实值, 均符合《海洋调查规范第3部分: 海洋气象观测》的标准。
海洋气象; 模拟和采样; 高精度; 运动补偿; 低功耗
21世纪被称之为“海洋的世纪”, 海洋环境监测包括海洋水文气象观测、海洋环境保护监测和海洋环境预报, 它们是研究海洋、开发海洋和利用海洋的基础[1]。海洋船舶气象仪(以下简称气象仪)作为海洋环境监测的重要设备[2]已广泛用于海洋军事和民用领域, 利用其自身携带的风速、风向、温湿度、气压、雨量、GPS和电子罗盘等要素, 为船舶航行提供安全保障, 为海洋环境立体监测提供技术支持。为了保证气象仪持续的高效率工作, 研制高精度、高集成度、高可靠性且满足《海洋调查规范第3部分: 海洋气象观测》的标准、便携且具有强大人机交互功能的海洋气象多参数模拟仪(以下简称气象模拟仪)对我国的观测和研究海洋环境、开发和利用海洋资源至关重要。
目前, 该种类的仪器仅有无锡无线电科学研究所、芬兰Vaisala等公司自主生产用于企业内部生产测试[2], 此类仪器通用化、模块化、智能化差, 且配套能力差、性能指标比较低、模拟的要素缺少GPS和电子罗盘信号、没有运动补偿算法, 无法解算气象真实值无法应用于海洋船舶环境。没有GPS和电子罗盘模拟和采集模块, 无法获得当前船舶的航速、航向和姿态, 也就无法验证船舶气象仪的电子罗盘和GPS的性能和对观测值进行运动补偿。在GB17378—2007《海洋监测规范》和GB/T 12763— 2007《海洋调查规范》中也都规定了测量海洋气象的标准, 而目前对气象仪的检测都存在浪费人力、物力和操作步骤繁琐[3-6]等缺点。
因此, 如何实现高精度、低功耗、便携且对海洋船舶气象仪定期检测的气象模拟仪是目前亟待解决的问题。
针对上述问题, 本文研发设计了一种海洋气象多参数模拟仪, 其具有强大的人机交互功能, 对上述的各个气象要素传感器信号实现高精度的模拟和采样。文中着重介绍海洋气象多参数模拟仪的整体设计, 对硬件设计、软件设计上和运动补偿算法方面进行研究提高本系统的精度、系统的稳定性和可靠性。
1 海洋气象多参数模拟仪总体设计
1.1 关键技术和性能指标
本系统是对通信技术、嵌入式技术和嵌入式系统的综合应用, 高度集成了温度、湿度、气压、雨量、GPS、电子罗盘、风速和风向传感器的采样和模拟功能。本系统为了实现对船舶气象仪的检测而设计, 为了实现这个目标, 有如下问题需要重点解决:
(1) 人机交互设计, 为了代替繁琐的人工故障排查, 提高本系统的通用性, 要具备操作简单的强大人机交互功能;
(2) 本系统需要在航海期间对气象仪进行检验工作, 因此系统的功耗和可靠性问题尤为重要。为此设计了电源管理[5-6]和屏幕亮度调节功能, 以降低系统的待机功耗[7];
(3) 为了能够验证船舶气象仪的工作稳定性, 要求本系统必须具备对气象要素高精度的模拟和采样。从硬件上设计新型采样和模拟电路, 软件上根据海洋气象观测标准设计数字滤波器并针对船舶的运动提出运动补偿算法, 以提高系统的精度。
本系统的模拟气象要素(简称“模拟器”)的性能指标如表1所示, 采集气象要素(简称“采集器”)的性能指标如表2所示。
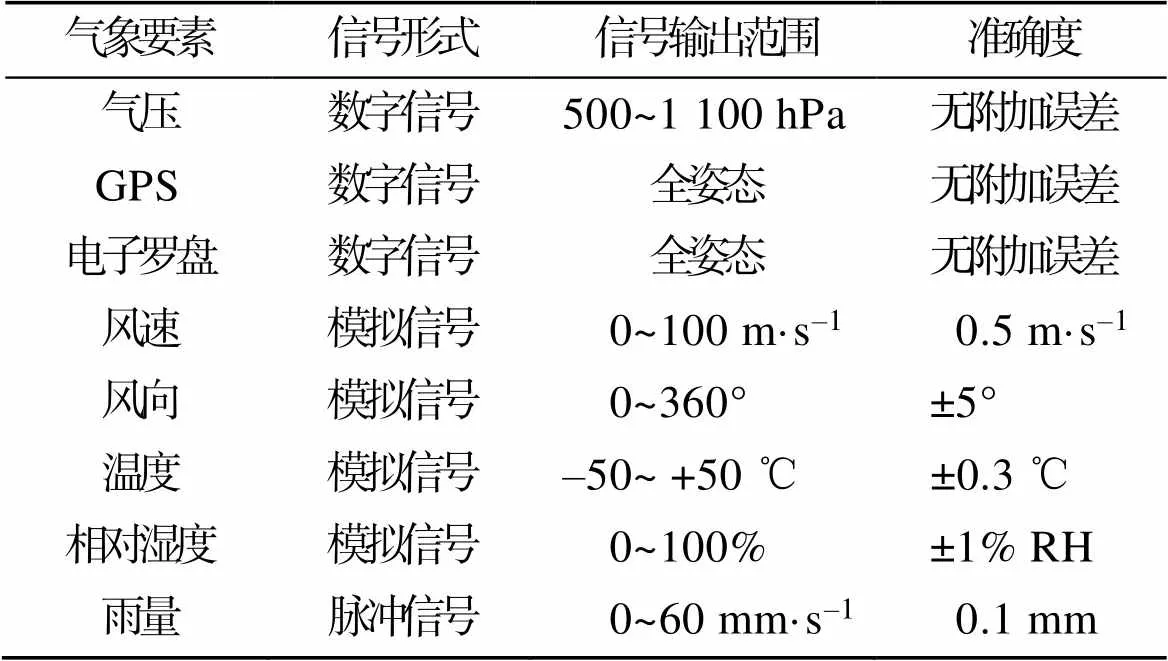
表1 模拟器的性能指标
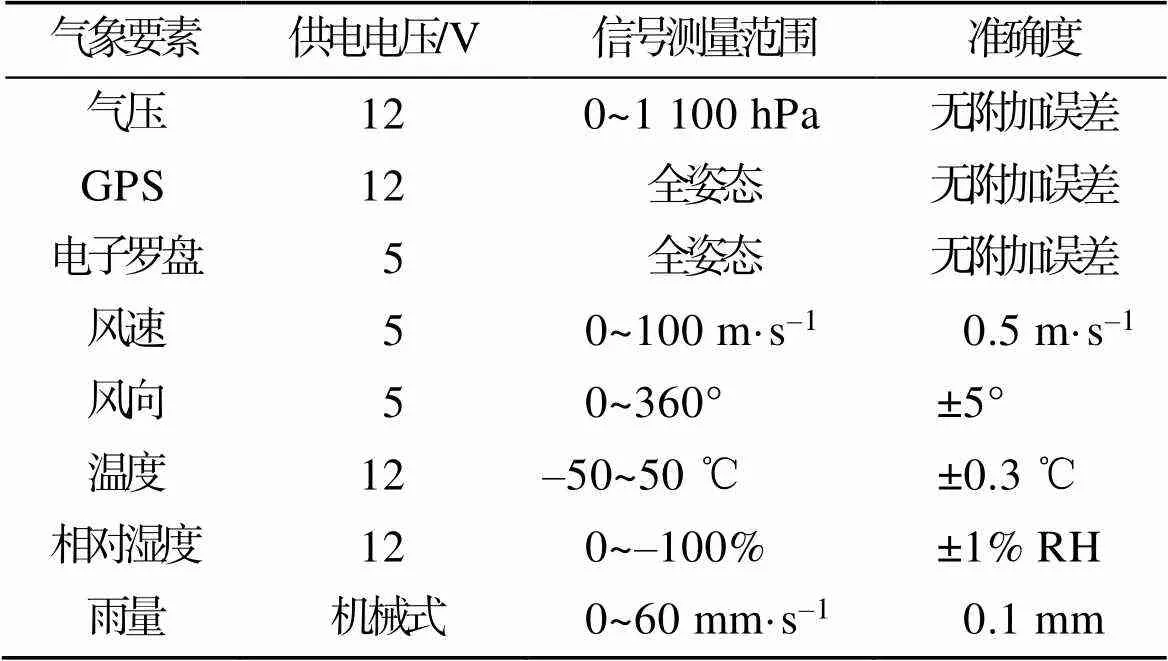
表2 采集器的性能指标
1.2 系统的整体设计
本系统采用模块化设计, 由电源模块、主控模块、人机交互模块及通信电路、模拟器和采集器组成。总体设计如图1所示, 供电模块负责为系统提供稳定电源; 主控模块负责完成嵌入式系统任务调度[8]、数据处理、补偿算法和数据通信功能; 模拟器负责模拟的各类传感器信号的数据处理、数据传输和数据保存的功能, 同时负责气象仪供电电压的监测; 采集器负责数据采样、数据处理、数据传输和数据保存的工作, 同时监测系统对传感器的供电电压。
2 硬件设计
硬件设计在集成系统的发展中占据了越来越重要的地位, 成为制约精度的首要因素。为了能够更好的实现上述的复杂功能, 本系统采用ST公司的微处理器STM32F407VET6[9-10]。本系统在充分考虑采样和模拟方案、EMS和EMI性能的基础上, 设计了人机交互、模拟器硬件电路、采集器硬件电路和低功耗设计, 实现硬件上对气象要素信号的高精度采集和模拟。气压、温湿度和雨量的模拟与采集与传统气象模拟仪模拟原理大致相同[11], 本文不再赘述。
2.1 气象要素模拟器与采集器电路设计
模拟器硬件设计如图1左半部分所示, 其主要包括多种传感器的信号模拟电路。为了使系统适用海洋船舶环境, 需要保证船舶的定位和姿态的准确性, 基于此设计了电子罗盘和GPS模块模拟和采样电路。
本文的重点硬件电路设计:
(1) 为了高精度的模拟风, 笔者设计了差分放大电路, 将片外高精度DAC[12]的输出及参考电压输入到运算放大器, 片外DAC通过SPI与主控通信, 风模拟电路设计如图2所示。为了模拟风传感器[13]的隔离特性, 该模块采用隔离开关电源供电并且输出的模拟信号要通过精密隔离运算放大器ISO122输出。
(2) 采集器如图1右半部分所示, 其主要包括多种传感器采样电路。其中, 为了提高风速采样的精度, 设计了新型的风速采样电路, 风速采样电路如图3所示, 该电路为了兼容不同类型风传感器的输出信号, 比如: 正弦波和脉冲的输出信号, 笔者设计了1和2两个0 Ω通道选择电阻。选择1通道时, 为单端输入, 用于匹配采样脉冲信号输出的风传感器; 选择2通道时, 为差分输入, 用于匹配正弦波信号输出的风传感器。为了风速值在小波动下不会产生突变并提高本电路的抗干扰能力, 采用滞回比较器。
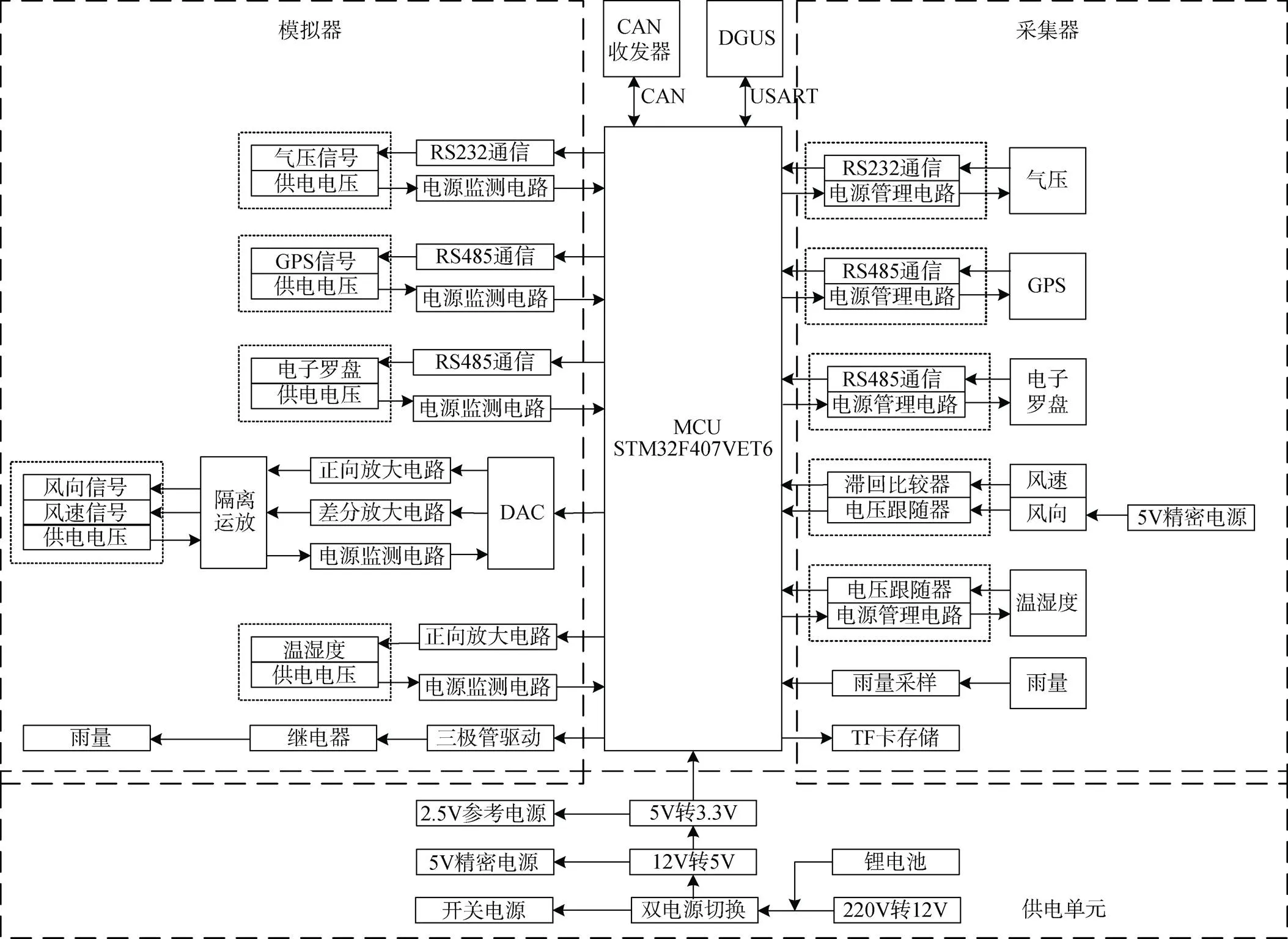
图1 海洋多参数气象模拟仪硬件系统框图
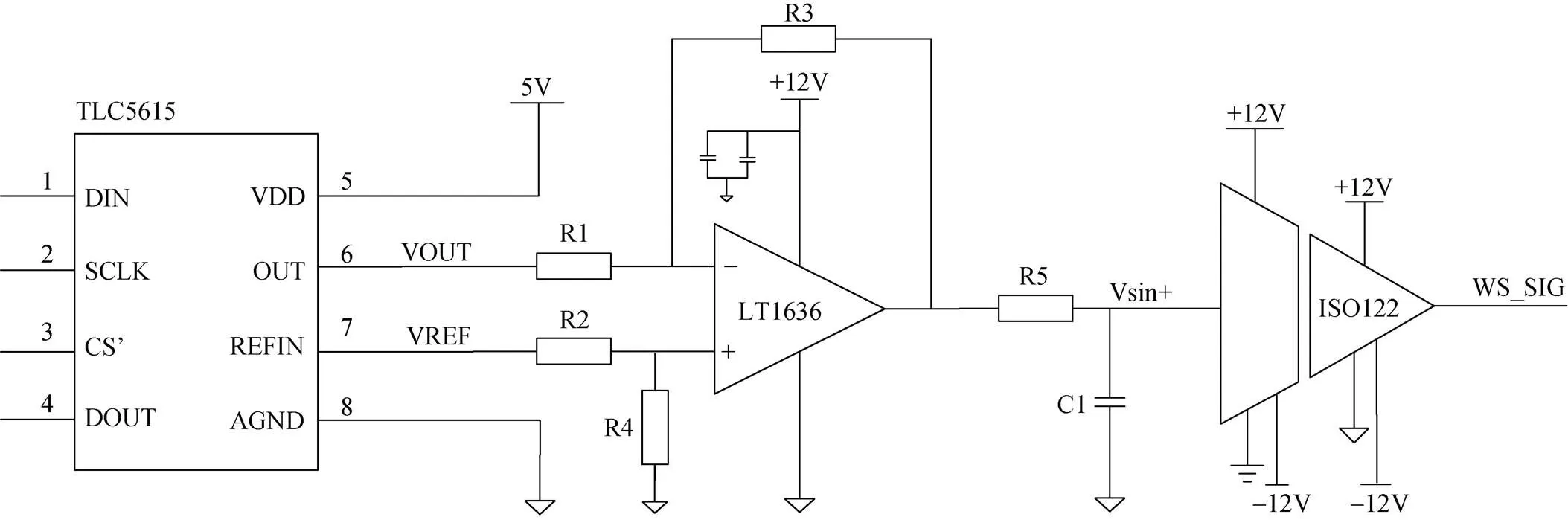
图2 风模拟电路
2.2 低功耗设计
本系统作为海洋船舶气象仪的检测设备, 需要对该船舶仪器上进行不定期的检测, 必须进行低功耗设计。通过本系统现场使用的情况分析可知, 本系统对固定的参数采集和模拟的次数有限, 因此本系统待机功耗对仪器工作时间起到决定的作用, 其中屏幕和对传感器的供电的功耗占整个系统待机功耗的65%以上。
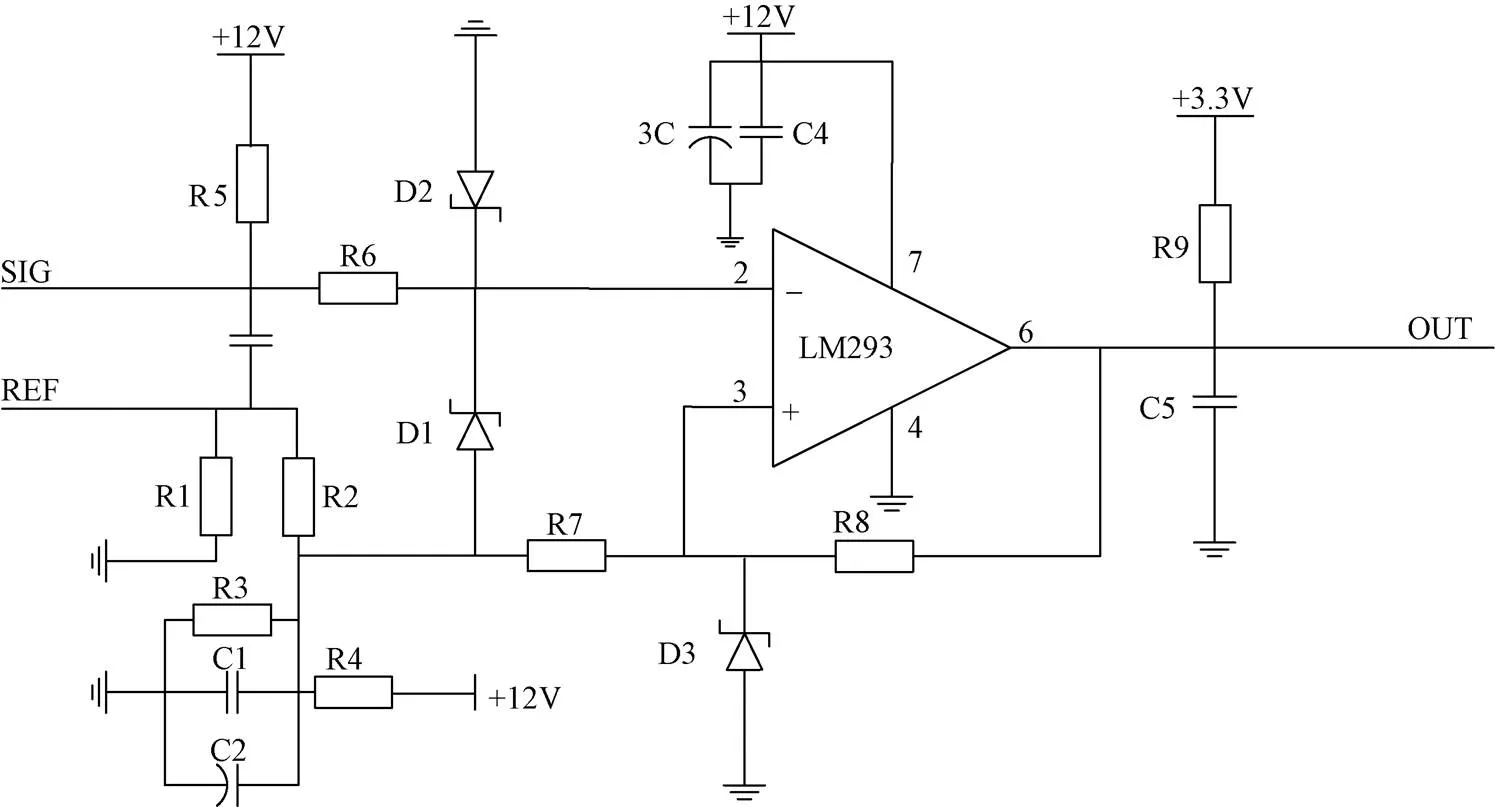
图3 风速采样电路
针对上述问题, 在系统中集成了电源管理模块, 而屏幕则根据需求设计了亮度调节模式以及息屏和亮屏模式。实现对整个系统电源的自主控制, 可由屏幕控制该模块的电源开断, 也可自主的判断当前若无进度执行, 关断屏幕供电, 由按键唤醒屏幕。图4为电源低功耗管理电路, 控制端接主控模块的I/O口, 若控制端置高, 则N沟道MOS管导通, P沟道MOS管的栅-源之间存在负压并大于其导通阈值, 电压由P沟道MOS管的漏极输出, 此过程为开启电压过程; 相应地, 将控制端置低, 则所有MOS管都处于关断状态。
2.3 人机交互
为了实现本系统高效率的人机交互, 采用迪文科技的DGUS触摸屏。该模块设计了RS-232通信电路和电源管理电路, 采用自主设计UI的方式开发, 开发设计的屏幕功能包括: 变量图标显示、绘制历史数据曲线、切换页面、触摸式键盘、变量录入以及开始和结束功能按钮等功能。

图4 电源低功耗管理电路
图为DGUS触摸屏的UI以及部分按键功能设计如图5所示, 其中(a)为参数选择界面, (b)为模拟器的模式选择界面。
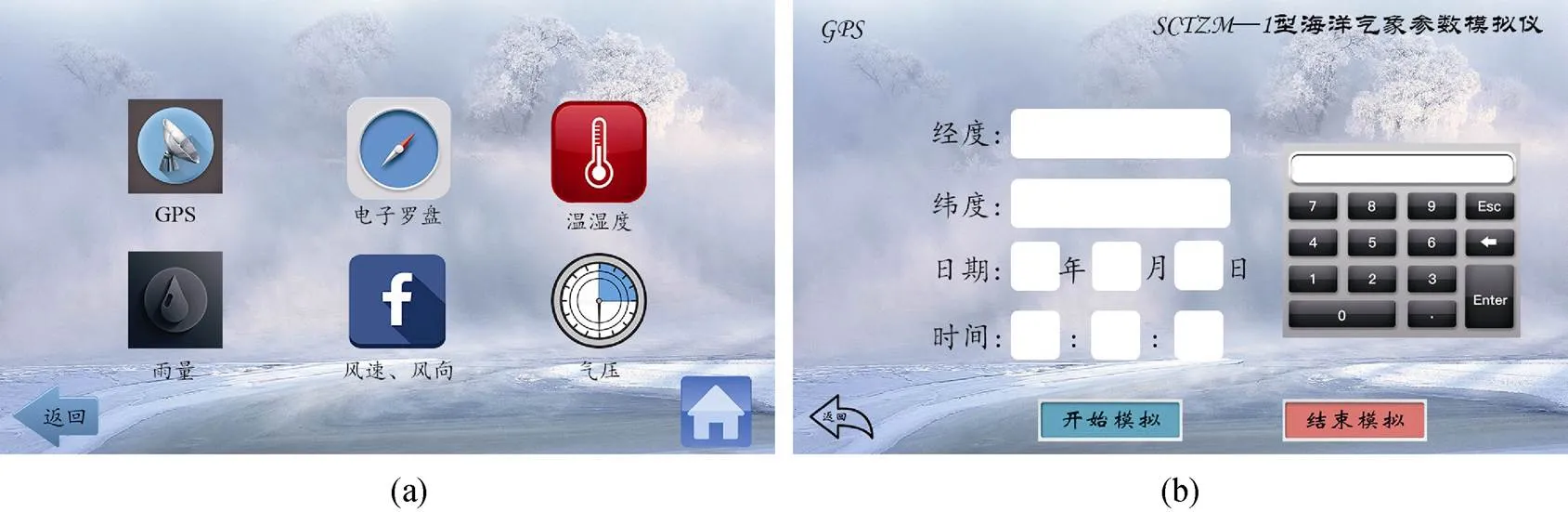
图5 DGUS触摸屏的UI以及部分按键功能设计
3 软件设计
系统主控单元的主要功能是按照DGUS屏的通信协议与主控模块通信, 接收屏幕下发的指令, 解析报文后变更系统的状态并执行相应动作。本系统使用Keil5-MDK IDE进行C语言编程开发。
3.1 控制主流程设计
本系统软件采用状态机[14]的思路编写, 主程序软件流程图如图6所示, 系统初始化后, 通过人际交互选择系统要实现模拟功能还是采集功能, 然后选择传感器, 进行数据传输、处理和保存, 并执行相应的功能。由于本文软件流程复杂, 因此单列一个参数的具体流程展现。本系统依托于DGUS进行人机交互, 采用RS-232的通讯方式, 对屏幕图标的点击, 都会生成相应的自定义地址报文, 然后会触发串口接收中断。通过对报文的解析, 进一步获取系统状态机的状态标志位和相应的输入参数, 然后系统执行相应的动作。

图6 系统软件主程序流程图
3.2 数据处理流程
数据处理主要包括解算、反解算和运动补偿。解算是采集器根据传感器的输出信号与真实值之间的线性对应关系, 计算出真实值的过程。反解算是模拟器根据传感器的输出信号与真实值之间的线性对应关系, 将屏幕输入的参数转换成输出的电信号的过程。运动补偿的作用是消除船的航向航速对风速和风向的影响, 首先根据真实风、相对风和船的运动建立运动补偿模型, 然后利用此运动补偿模型, 将风传感器在不同航速和航向下, 测得的相对风转化成真实风, 保证船舶在真实风的指导下从事各种海洋活动。
3.3 数字滤波器设计
按照《海洋调查规范第3部分: 海洋气象观测》, 瞬时风的风速风向每3 s采集1次, 温湿度是1 min测量6次, 即每10 s测量1次。为了提高采样数据的精度, 采用数字滤波方式排除干扰。其中, 温湿度采用去极值平均滤波算法; 风速风向经运动补偿后, 风向采用算术平均值滤波算法和风速采用测周法; 雨量采用滑动平均滤波法。
4 系统测试及运动模型验证
为了验证系统是否达到要求的性能指标, 设计系统测试实验以及运动补偿实验, 其中系统测试实验包括与气象仪对接验证模拟器性能实验和与传感器对接验证采集器性能实验。由于本系统参数众多, 测试结果数据量较大, 以下仅展示部分实验数据。
4.1 模拟器性能实验
为了验证模拟器的性能, 与气象仪对接测试模拟器的性能, 本文仅展示测量的模拟量包括风速、温度和相对湿度试验数据, 模拟风速测试如表3所示, 模拟温度测试如表4所示。
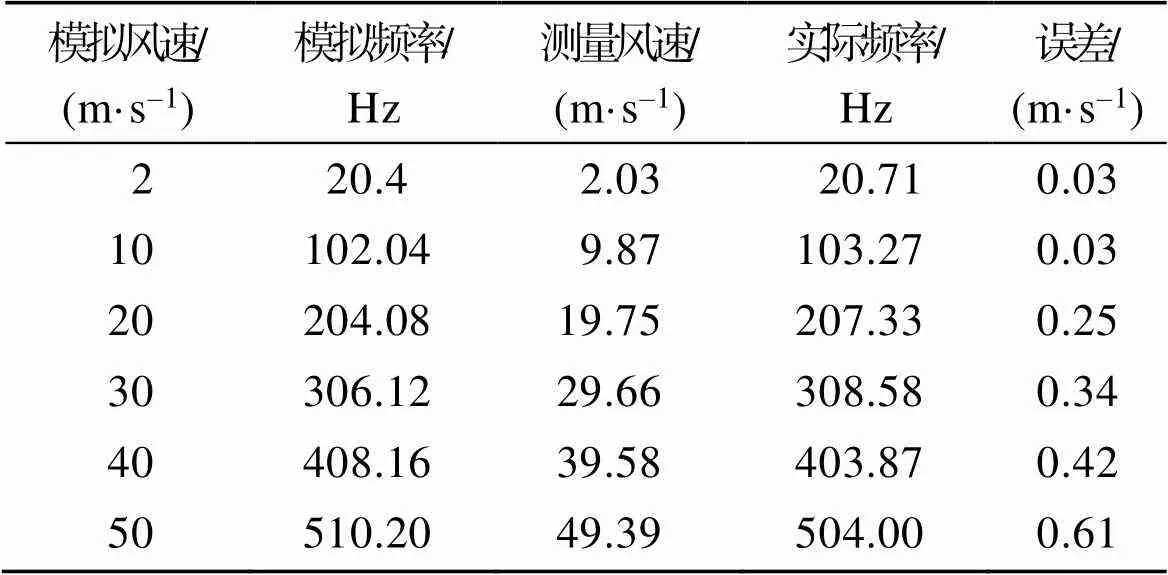
表3 模拟风速测试
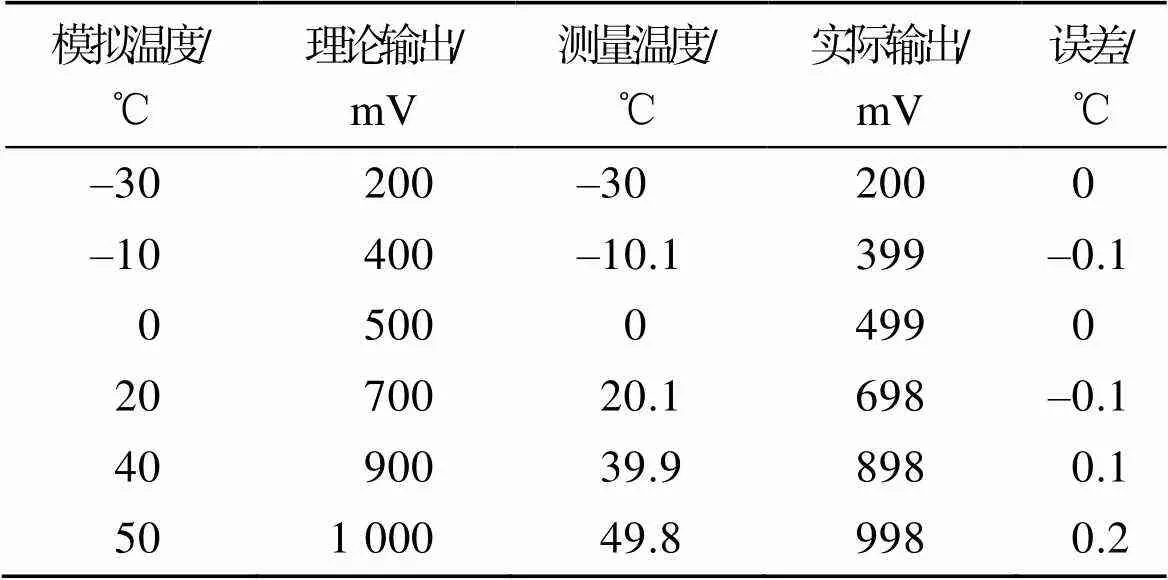
表4 模拟温度测试
与气象仪对接测试模拟器性能实验数据表明: 静止状态时, 模拟风速信号的误差都保持在1 m/s以内, 气温要素绝对误差保持在0.2 ℃以内, 相对湿度绝对误差保持在0.4% RH以内, 模拟器技术指标全部达到规定要求, 且系统功能正常稳定, 能够满足目前的船舶气象仪的测试要求。
4.2 采集器性能实验
由于模拟器的性能测试通过, 为了验证采集器在极端天气下, 例如50 ℃的高温或者100 m/s的风速下的系统性能, 将采集器与模拟器连接测试采集器性能。风速风向采集测试数据如表5所示。温度采集测试数据如表6所示。
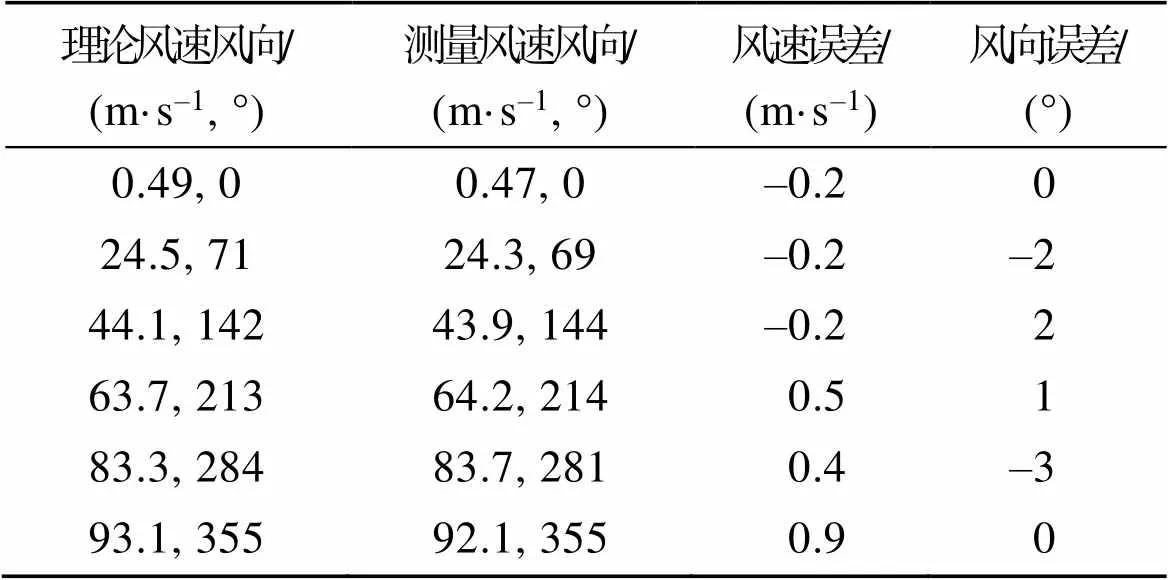
表5 风速风向采集测试
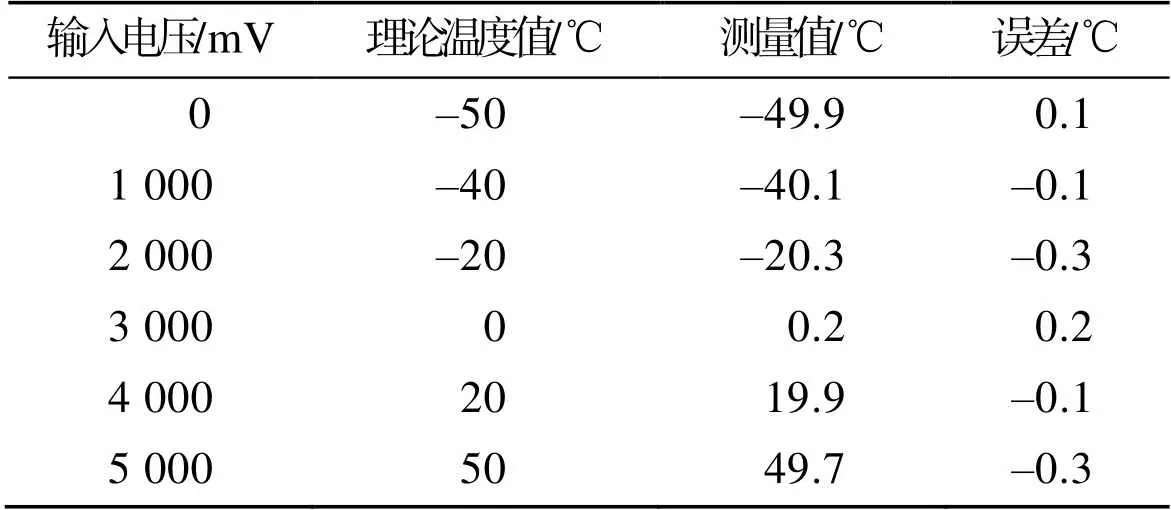
表6 温度采集测试
与模拟器对接联合测试数据表明: 风速的测量绝对误差保持在1 m/s以内, 风向的绝对误差保持在3°以内, 温度测量绝对误差保持在0.3 ℃以内, 相对湿度误差采集绝对误差保持在2% RH左右, 雨量的绝对误差保持在0.2 mm以内, 各个要素的验证结果均达到了系统的性能指标, 符合海洋环境观测规范。
4.3 运动补偿实验及结果
为了使本系统的精度提高, 因此针对船舶的运动状态建立了船舶平面运动的相对风速风向和真风速风向的解算模型。通过GPS计算得出船速和航向, 通过风传感器采集得到相对风速风向, 根据运动补偿算法, 对相对风进行运动补偿, 解算出真实的风速风向, 更好地验证船舶气象仪与风传感器的采样精度的准确性。
相对风是由于船在运动状态下产生的与船运动方向相反、速度大小一致的船风与真实风的结合产生的, 其矢量模型如图7(a)所示。首先, 根据海洋观测规范, 以正北方向作为轴, 顺时针角度为正, 建立船舶运动平面坐标系, 如图7(b)所示。
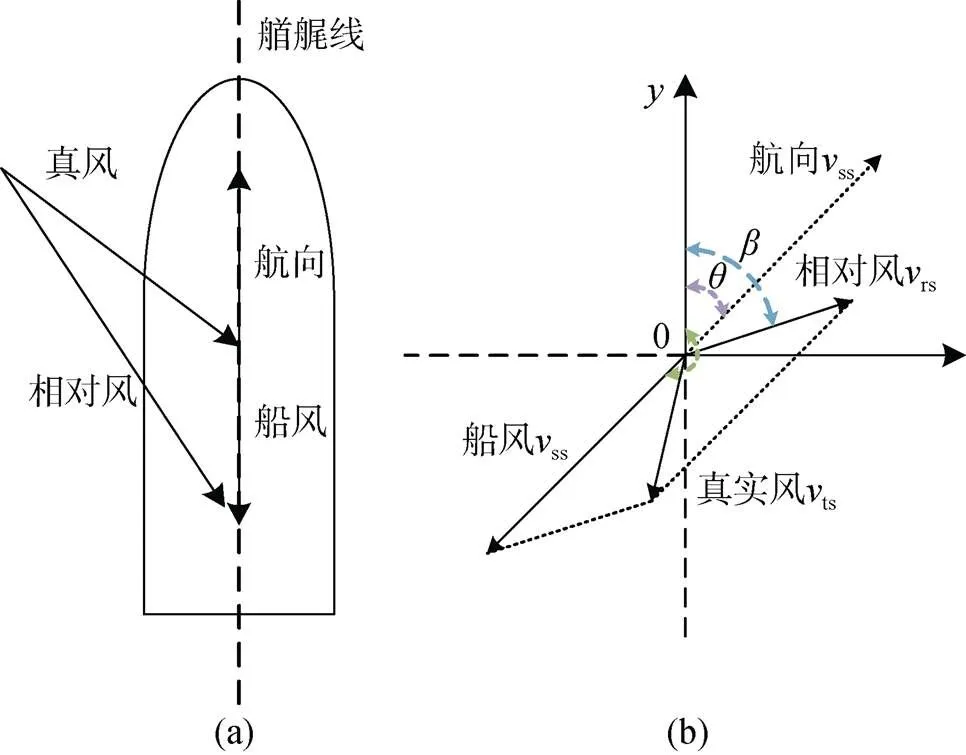
图7 风的矢量模型(a)与船舶平面运动矢量模型(b)
其中真风风速为ts, 真风风向为, 相对风速为rs, 相对风向角为, 航速大小为ss, 航向角为。


此时的, 风的来向就分为两种情况分别是
本系统是在海试长期测试过程中, 通过读取TF卡中数据, 选取保持航向为180°即船风角为0°和航速3.0 m/s情况下的数据。在选取了真风风速为5.0 m/s且不同风向的情况下, 验证运动补偿的效果, 其中真风风速为实验室的同期海试的屏显风速仪获得, 实验数据如表7所示。

表7 风速风向运动补偿实验数据
数据分析: 未补偿前的风速均值为5.97 m/s, 风速最大相对误差达到60%, 最小相对误差为8.4%, 风向相对值误差波动范围为1.3%~73.6%; 补偿后的风速均值为4.97 m/s, 补偿后的风速相对误差最大为4.2%, 最小相对误差为0.1%, 在补偿后的风向的相对误差保持在3°以内。运动补偿后测量值的方差为0.019 3 m/s, 运动补偿前的方差为4.332 m/s, 运动补偿后得测量值更加接近真实值, 满足《海洋调查规范中第3部分: 海洋气象观测》的所有误差标准, 证明模型可行, 实现了对风向风速的高精度采集。
5 结论
为了研发高精度的新型海洋气象多参数模拟仪, 并实现对船舶气象仪及传感器定期检测, 设计了新型的风模拟和风采样的电路, 并加入了GPS和电子罗盘的模拟模块与采样模块解算船的航速和航向, 从硬件上提高了系统的精度; 又对各个模拟和采样的传感器参数设计了数字滤波器, 同时对风向和风速进行运动补偿以解算真实风速和风向, 从软件上提高了系统的精度。同时, 还设计了系统性能测试实验和运动补偿模型的可行性。经实验验证, 本系统的性能满足海洋气象观测的所有标准, 证明了本系统具有低功耗、高精度、稳定性好、便携的特点, 可以满足对船舶气象仪和传感器的定期检测。
[1] 初伟先.基于AVR单片机的船舶气象仪测试系统的设计与实现[D].青岛: 中国海洋大学, 2014.
CHU Weixian.Design and implementation of ship meteorological instrument test system based on AVR microcontroller[D].Qingdao: Ocean University of China, 2014.
[2] 李磊.基于ARM和嵌入式Linux的新型船舶气象仪的设计与开发[D].青岛: 中国海洋大学, 2009.
LI Lei.The design and development for new type ship meteorology instruction based on ARM and embeded Linux[D].Qingdao: Ocean University of China, 2009.
[3] 田滢.基于以太网的数字气象仪的研究与设计[D].青岛: 中国海洋大学, 2007.
TIAN Ying.A design and research of intergrated digital meteorology based on ethernet[D].Qingdao: Ocean University of China, 2007.
[4] 余炳莹.气象要素信号模拟器研制[D].南京: 南京信息工程大学, 2012.
YU Bingying.The research on the signal simulator of meteorology elements signal simulator[D].Nanjing: Nanjing University of Information Technology, 2012.
[5] 陈岩, 谭婷, 高峰, 等.水质监测无线传感器网络节点双电源设计[J].传感器与微系统, 2015, 34(10): 93-95, 99.
CHEN Yan, TAN Ting, GAO Feng, et al.Design of double power of WSNs node for water quality monitoring[J].Transducer and Microsystem Technologies, 2015, 34(10): 93-95, 99.
[6] 吕涛, 施伟斌, 范坤坤, 等.WSN节点电池供电性能测试研究[J].传感技术学报, 2013, 26(10): 1457-1462.
LV Tao, SHI Weibin, FAN Kunkun et al.The study of WSN nodes battery-powered performance[J].Chinese Journal of Sensors and Actuators, 2013, 26(10): 1457- 1462.
[7] 张宁, 王东明.一种船舶气象仪的故障诊断系统[J].机械管理开发, 2018, 33(12): 115-116.
ZHANG Ning, WANG Dongming.A fault diagnosis system for marine meteorological instruments[J].Mechanical Management Development, 2018, 33(12): 115-116.
[8] 曹营.嵌入式系统任务调度机制的研究与实现[D].大连: 大连理工大学, 2010.
CAO Ying.Research and implementation of task scheduling mechanism based on embedded system[D].Dalian: Dalian University of Technology, 2010.
[9] NEZHAD M M, NESHAT M, HEYDARI A, et al.A new methodology for offshore wind speed assessment integrating Sentinel-1, ERA-Interim and in-situ measurement[J].Renewable Energy, 2021, 172(3): 1301- 1313.
[10] ZUO Zhiyu, ZHUO Minmin, MAO Hanping, et al.Design of intelligent control system for micro plant factory based on STM32F407[J].Journal of Agricultural Mechanization Research, 2019, 10(10): 213-218.
[11] 黄齐校, 苏志伟, 韦英妹.浅析广播电视发射机通信协议设计[J].视听, 2020, 155(3): 62-63.
HUANG Qixiao, SU Zhiwei, WEI Yingmei.Brief analysis on communication protocol design of radio and TV transmitter[J].Audio-Visual, 2020, 155(3): 62-63.
[12] WANG Jiarong, XIAO dong, ZHANG Zongda, et al.Using dual-channel D/A converters design successive approximation A/D converter[J].Applied Mechanics and Materials, 2015: 611-614.
[13] YI Zhenxiang, QIN Ming, HUANG Qing-an.Experiment of the MEMS wind sensor based on temperature- balanced mode[J].IEEE Sensors Journal, 2017, 17(8): 2316-2317.
[14] 王艳玲, 徐香梅.船舶气象仪测试系统中AVR单片机的应用[J].舰船科学技术, 2017, 39(24): 177-179.
WANG Yanling, XU Xiangmei.Application of AVR single chip microcontroller in marine meteorological instrument test system[J].Ship Science and Technology, 2017, 39(24): 177-179.
Development of a high-precision marine meteorological multi- parameter simulator with motion compensation
LIU Bin, HAN Zhi-an, SU Li-ri, QI Sheng-bo
(College of Engineering, Ocean University of China, Qingdao 266100, China)
marine meteorology; simulation and sampling; high precision; motion compensation; low power consumption
In view of shortcomings such as a long detection cycle, low manual inspection efficiency, low simulation accuracy, and lack of relevant motion compensation algorithms, traditional automatic weather station sensor signal simulators are not suitable for a comprehensive inspection process of marine ship weather instruments.Moreover, these simulators require a motion compensation algorithm to adapt to a ship’s environment.This work studies the high-precision signal sampling circuit, signal output, software filtering, and motion compensation of the meteorological element sensor.The analysis of the principles of sensors and shipborne weather instruments enables the design of the sampling circuit, signal simulation circuit, touch screen, GPS and electronic compass sampling, and simulation circuit of various meteorological parameters.A motion compensation model test is performed during the offshore test.Simultaneously, instrument function and precision tests are performed.Research and test results show that the system has a low power consumption, high reliability, and high precision and can be applied to the marine environment.Moreover, it has the functions of real-time positioning of ships, real-time simulation and collection of meteorological elements, and motion compensation.After the motion compensation algorithm, the measurement variance of the wind speed is 0.0193 m/s, and the accuracy is improved close to the real value, which is in line with the standards of “Marine Survey Specification Part 3: Marine Meteorological Observation.”
Aug.10, 2020
TP23
A
1000-3096(2021)10-0104-09
10.11759/hykx20200810002
2020-08-10;
2020-12-04
刘滨(1962—), 男, 吉林四平人, 教授, 研究方向: 嵌入式技术应用开发, 海洋仪器仪表开发, E-mail: hdliubin@ouc.edu.cn
(本文编辑: 康亦兼)