适应极高静水压力的软体智能材料与软体机器人
2021-11-17曲绍兴
曲绍兴
浙江大学工程力学系, 杭州 310027
深海中极高静水压力给人类探索与作业带来巨大挑战, 例如在马里亚纳海沟10 900米深处,静水压高约110兆帕, 接近于1100个大气压. 因此, 深海机器人与机电装备通常需要高强度外壳(如钛合金)或压力补偿系统来保护. 最近, 浙江大学航空航天学院交叉力学中心李铁风教授团队, 提出了由软硬融合方式构造机电系统、力电耦合软体智能材料提供驱动的软体机器人设计方法, 证实了该类软体机器人与智能材料可适应极高静水压力, 成功实现了软体机器人无需耐压外壳在马里亚纳海沟10 900米海底自带能源驱动(图1 a), 以及在南海3224米深海游动(图1 b), 为世界首次. 论文以“Self-powered soft robot in the Mariana Trench”为题, 于2021 年3 月4 日作为封面文章发表在《Nature》杂志上(Li et al. 2021).
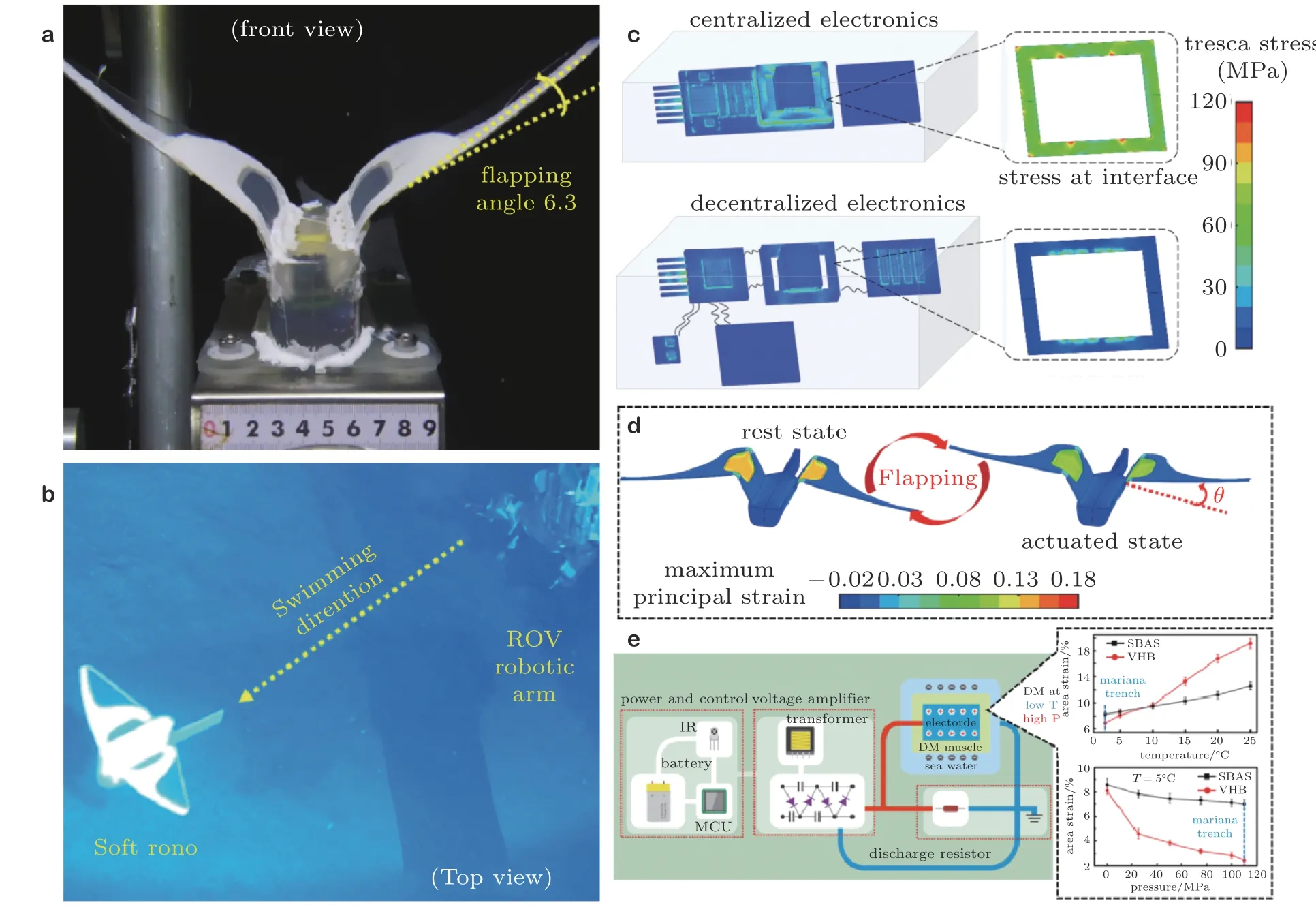
图 1
为了应对深海中极高静水压力, 深海机器人通常由高强度外壳(如钛合金)或压力补偿系统来保护其电子设备与驱动机构(Umapathy et al. 2019), 而以深海狮子鱼为典型代表的生物, 能很好适应极高水压在深海中生存(Wang et al. 2019). 近年来科学家们开始关注研究具有仿生设计的水下软体机器人. 各类软体智能材料与结构, 如介电弹性体、响应水凝胶和流体软腔道等也被应用到水下软体机器人中, 用于实现扑翼、波动、喷射等推进动作. 然而, 当这些具有柔软驱动机构的机器人用于深海时, 其动力和控制电子系统仍需要坚硬外壳保护来抵抗水压, 从而限制了其柔顺性和轻便性. 若软体机器人无需硬质耐压结构保护能自身适应高水压, 并由软体智能材料驱动, 则有望为深海机器人与智能系统的设计提供全新的解决方案.
浙江大学李铁风及其合作者团队对在马里亚纳海沟约7300米处捕获的钝口拟狮子鱼(Pseudoliparis swirei)进行研究, 发现其软凝胶状组织包裹细碎骨骼的特点. 受此启发, 提出了电子器件分散融合在软基体中的设计方法. 采用该设计可以有效调控极高静水压力下的电子器件界面应力, 从而使各类电子元件以及锂电池在高水压环境下正常工作(图1 c). 研究团队利用介电弹性体的力电耦合响应变形来实现该机器人系统的柔软驱动. 当由供电系统激发的电场从厚度方向作用于介电高弹体薄膜时, 薄膜发生节律性收缩和舒张, 诱发与之粘合一体的柔性鱼鳍弯曲和平展, 从而实现仿生推进功能(图1 d). 研究发现, 深海的低温高水压环境可能诱发聚合物材料的玻璃化转变, 使得力电耦合变形能力大幅降低. 通过设计合成嵌段共聚物的方式, 团队研制了一种低相变温度的介电高弹体材料, 成功实现了在110 MPa及约2摄氏度环境中的大变形驱动(图1 e).这类可在高水压与低温环境中无需耐压外壳正常工作的电子系统和可实现大变形驱动的软体智能材料, 有望在软体机器人以及特种作业装备领域实现重要应用.
学科交叉融合是催生原创性成果的重要科研方式. 力学具有与理、工、信、医等多学科交叉融合的优势, 当前与其他学科的交叉越来越广泛和深入, 所涉及对象的复杂性越来越突出, 引发了一系列处于科学前沿的新问题、新思想和新领域. 交叉力学(X-Mechanics)以力学为牵引,通过介质交叉、层次交叉、刚柔交叉、质智交叉等(Yang et al. 2019, Liu et al. 2021), 实现多学科的交叉和融合, 为力学研究提供了无垠的疆域.
李铁风等人的工作, 不仅拓展了软体机器人与智能系统的应用范围, 为极端环境下软体智能材料耦合响应提供了重要理论依据; 也为机器人与智能系统尤其是深海机器人的设计及应用提供了新思路, 是以力学研究为牵引, 开展多学科交叉研究的典范.