基于LiDAR的温室番茄冠层几何参数提取
2021-11-17杨征鹤杨会民陈毅飞王学农
杨征鹤,喻 晨,杨会民,陈毅飞,周 欣,马 艳,王学农
(1.新疆农业大学机电工程学院,乌鲁木齐 830052;2.新疆农业科学院农业机械化研究所,乌鲁木齐 830091)
0 引 言
【研究意义】植物冠层数据是分析植物生长状态的重要参数,利用传感器技术检测植物位置信息及轮廓外形是对靶精准喷雾技术的基础[1],探测作物几何信息是对靶喷雾技术的重要研究内容[2],植物冠层体积特征也是调整农药用量的关键。温室中环境较为稳定,更加适合使用激光雷达采集作物信息。获取温室环境中番茄作物冠层数据,搭建基于激光雷达的温室番茄冠层检测平台,研究提出1种基于点云的单株番茄分割和体积获取方法,对实现从番茄作物行中获取单株番茄植株冠层数据与体积有实际意义。【前人研究进展】检测冠层表征采用的有超声波传感器技术、立体视觉技术、光传感器技术及激光雷达传感器技术[3]。超声波技术已经在计算作物冠层体积[4]和估算冠层密度[5]得到应用,Maghsoudi等[6]使用超声波传感器进行果树冠层量的有效估计,以减少果园中农药用量。翟长远等[7]基于超声波传感器设计了1种果树靶标体积的探测方法。但在实际使用中超声波传感器存在靶向性及采样频率较低等问题,存在一定的误差。Sylvain等[8]利用图像技术和SFM技术建立了作物行三维模型,预估植物高度和叶面积。立体视觉技术及光传感器受外界环境光影响较大[9],稳定性不足,在实际应用限制较多,相比之下利用激光雷达检测冠层表征是现阶段最高效的技术。激光雷达传感器具有速度快、精度高、靶向性强、非接触性、受外界环境光影响较小等优点[10],在预测冠层表征方面较为可靠,并已经广泛应用[11-13],且在不规则植株冠层特征信息的获取中有着难以比拟的优势[14]。Jordi等[15]验证了二维激光雷达测定植株体积和密度相关的冠层参数的精度,俞龙等[16]基于二维激光雷达设计了1种对丘陵山地果树冠层体积的激光测量方法,吴志鹏等[17]使用激光雷达对果树轮廓进行测量,试验结果证明,该方法具有一定的可行性。张美娜等[18]使用二维激光雷达设计了1种靶标探测系统试验平台,提出了1种基于点云信息的靶标叶面积密度的计算方法。三维雷达相较于二维雷达具有更高的信息获取能力,Ravi等[19]将LiDAR与无人机相结合,获取作物冠层覆盖情况并建立作物冠层地图,管贤平等[20]将三维激光雷达与导航系统、无人机相结合获取大田大豆单株几何冠层几何参数。【本研究切入点】激光雷达现阶段多用于针对森林或果园中林木及果树的冠层数据提取,很少在温室环境中对蔬菜类作物冠层进行分析。研究基于LiDAR的温室番茄冠层几何参数提取。【拟解决的关键问题】以番茄作物行为目标,设计基于LiDAR的温室番茄冠层检测平台,在番茄作物行两侧匀速运行激光雷达,获取番茄植株的三维点云信息,对点云进行去噪、配准处理,从行点云中分割获取单株点云,获取冠层信息,将点云重建并获取体积信息,验证获取的三维轮廓的准确性,比较与凸包算法和人工测量值,验证装置的精准性。
1 材料与方法
1.1 材 料
1.1.1 番茄
选择新疆乌鲁木齐西山的一处温室番茄种植园内,选择的番茄作物生长期分别为40、80 d,高约0.6和1.5 m,株距同为0.3 m,分别定义为A组和B组。
1.1.2 仪器设备
试验平台主要由激光雷达部分、支架部分、导轨部分组成,其中导轨部分主要由滑块、线轨部分、步进电机、控制器及电源部分组成,激光雷达部分直接与PC机相连。图1
选用锐博公司生产的XG80导轨平台,该导轨平台具有承载能力强、精度较高、稳定性好的优点。滑轨总长度为1 500 mm,滑块通过步进电机驱动,精度良好,滑块移动速度为10~50 mm/s,滑块所连接的支架高度可调,以适应不同的作业环境。
选用北科天绘公司的R-Fans-32线程激光雷达。激光帧频在5~20 Hz可调,最大探测距离为200 m,距离分辨率为4 mm,激光波长为905 nm,测程远,回波强度较为准确,测量精度较高,角度覆盖和角分辨率,有效的抵抗背景光的干扰。
1.2 方 法
番茄作物行点云通过获取、配准等一系列处理,最后获取单株点云并通过MATLAB进行重建与体积的计算。图2
1.2.1 番茄行点云获取
激光雷达使用飞行时间原理进行计算[21],激光雷达的坐标生成Point(X,Y,Z)。图3
从XY平面方向对单株点云直接测量,计算点云中的最高点和最低点的差值作为激光雷达获取的番茄植株的冠层高度HL,人工测量值为从平行于导轨方向使用卷尺从每株番茄中获取冠层高度HM。
点云中每个点的坐标计算:
Angle=-wt-w×ΔT-(H_Bta).
(1)
X=Range×cos(V_theta)×cos(Angle).
(2)
Y=Range×cos(V_theta)×sin(Angle).
(3)
Z=Range×sin(V_theta).
(4)
式中:Angle为雷达中激光发生器偏转角度,w为其瞬时角速度,Range为该点回波距离,ΔT为激光发射与接收时间偏差,H_Bta为水平角度,V_theta为垂直角度。
将激光雷达分别固定在距地面0.4和0.8 m处,与番茄作物行的距离设置为2 m。支架安装到滑块上,导轨与番茄植株进行平行放置。使用探测试验平台,在温室中分别对2组番茄植株依次进行探测。使用水平仪将导轨进行水平放置,激光雷达设置10 Hz的扫描速度,扫描起始角度设置为-45°,终止角度为45°,以减少其他外界环境点云的影响,设置0.05 m/s的滑块速度运行。运行激光雷达,使用雷达上位机软件CtrlView获取点云数据并以.xyz格式进行存储,获取到的点云数据。图4,图5
1.2.2 点云去噪与匹配
点云去噪是通过为每个点搜索指定邻域点个数的相邻点,计算其与邻域点的平均距离,并计算这些平均距离的中值和标准差。如果该点的平均距离大于最大距离,则将其视为噪声点,将其去除。
利用ICP(Iterative Closest Points)即迭代最近点算法对双侧点云进行匹配。ICP配准算法是比较常用的点云配准方法之一,其基本原理为在P、Q两目标点云中,按照一定的约束找到最近的邻近点,计算出平移参数T和旋转参数R,对Q使用求得的平移和旋转参数,得到新的变换点集;如果新的变换点集与参考点集满足2点集的平均距离小于某一给定阈值,则停止迭代计算,否则新的变换点集作为新的Q继续迭代,直到达到目标函数的要求[22],目标函数为:
(5)
1.2.3 地面分割
获取番茄冠层高度需要去除地面,常用的地面分割方法有平面拟合、RANSAC算法等[23],由于温室地面相比大田环境较为平整,选择平面拟合算法,地面在X、Y、Z3个方向上都存在一定的误差[24],选用基于特征值法拟合点云平面[25],设置拟合点云平面方程为:
ax+by+cz=d.
(6)
式中:a、b、c为单位法向量,其中d为坐标原点到该拟合平面的距离,则对某一平面扫描的n个数据点的坐标为(xi,yi,zi),则任意数据点到该拟合平面的距离为:
di=|axi+byi+czi-d|.
(7)
并且能够满足:
(8)
1.2.4 单株番茄点云分割算法
番茄植株在实际的生长过程中,相邻的番茄植株会出现叶片的交织,在激光雷达获取的番茄植株点云中出现单株番茄植株的边缘界定不清晰,影响冠层数据的采集和冠层体积的计算。在番茄点云中,单株番茄点云中心密度较高,两侧较低,根据这一特征,采用均值漂移算法(Meanshift)进行单株点云分割。均值漂移算法是通过沿着点云密度上升方向寻找聚簇点,初始确定1个中心点,然后计算在设置的一定空间内对所有的点xi与中心点的向量,并计算出整个点云空间的平均值,得到1个偏移均值,将中心点移动到偏移位置,重复移动,直到满足一定条件后结束[26-27],其中偏移均值为:
(9)
式中:以x为中心点,半径为h的高维度球区域,k为包含在Sh范围内的点数,xi为包含在Sh内的点。中心点的更新:
xt+1=Mt+xt.
(10)
式中:Mt为t状态下求得的偏移均值,xt为t状态下的中心。
使用LiDAR360软件直接从XY平面方向对单株点云直接测量,计算点云中的最高点和最低点的差值作为激光雷达获取的番茄植株的冠层高度HL,人工测量值为从平行于导轨方向使用卷尺从每株番茄中获取冠层高度HM。图6
1.2.5 单株番茄植株体积计算
选取的alp值为0.1,其中alp值越小,网格化体积越小,得到的点云体积更加精确。验证使用alpha shape算法求取体积的精度,使用凸包算法(Convex hull)求取体积,作为参考值对比。凸包算法能够对单株点云数据建立一个能够将所有点云都包含在内的最小整体凸包。
由于番茄植株具有并不规则的外形,枝叶相互遮挡,在计算体积时,需要对番茄植株点云数据进行三维重建。该次试验使用alpha shape算法对番茄植株的三维点云进行重建[28],alpha shape算法能够在离散的三维点云空间中提取边缘并建立对应最小包络。从A组和B组各选取10株番茄进行点云重建,选取的alp值为0.1,其中alp值越小,网格化体积越小,得到的点云体积更加精确,从而更精准的对番茄植株进行重建,最后使用Volume函数对所重建后包络进行体积的计算[29]。为验证使用alpha shape算法求取体积的精度,使用凸包算法(Convex hull)求取体积,作为参考值进行对比。凸包算法能够对单株点云数据建立一个能够将所有点云都包含在内的最小整体凸包,并进行体积的计算。
使用人工测量的方式对随机5株番茄植株进行体积获取。在单株体积计算时,获取的5个位置的冠层宽度,将5处位置的横截面近似为椭圆,求出椭圆面积与每个部分的冠层高度相乘,并通过累加得到番茄植株的冠层体积。
1.2.6 精度验证

(11)
Va=VLi-VMi.
(12)
(13)
(14)
(15)
式中:n为番茄株数。
2 结果与分析
2.1 规则框架人工测量值与系统检测值对比
研究表明,在激光雷达前进方向上最大相对误差为-2.8%,误差值为-1.7 cm,在垂直于激光雷达前进方向最大相对误差为-4.5%,误差值为-3.6 cm,该检测平台在较小的测量范围内沿激光雷达前进方向上误差较小,误差控制在10 cm以内。图7,表1

表1 规则框架人工测量值与系统检测值对比Table 1 Comparison table between the manual measurement value of rule support and the platform detection value
2.2 冠层高度人工测量值与平台检测值对比
研究表明,A组为y=1.007 9x+0.020 1,R2=0.902 2,均方根误差为RMSE=0.039,平均绝对误差为0.025 m,B组为y=0.855 2x+0.267,R2=0.848 7,均方根误差为RMSE=0.043,平均绝对误差为0.031 m,各评价指标达到了较好的水平[30]。表2,图8,图9

表2 冠层高度人工测量值与平台检测值对比Table 2 Comparison of canopy height measuredmanually with platform measured values
2.3 番茄冠层重建与体积

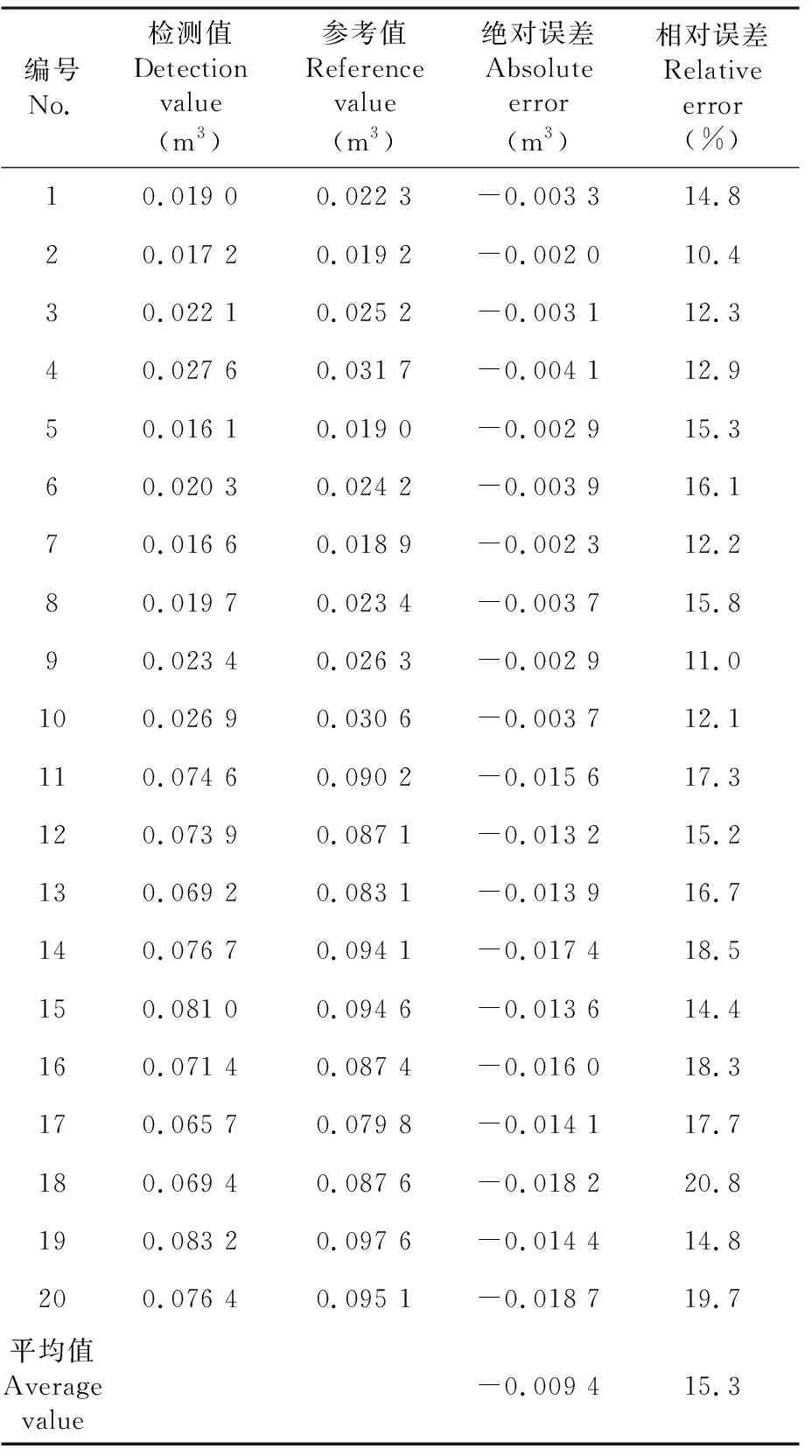
表3 番茄冠层体积平台检测值与参考值Table 3 Detection value and reference value of tomato canopy volume platform
获取的5个位置的冠层宽度,将5处位置的横截面近似为椭圆,求出椭圆面积与每个部分的冠层高度相乘,并通过累加得到番茄植株的冠层体积。人工测量值与平台检测值的VRMSE为0.015,绝对误差Va最大为0.021 4 m3,最小为0.003 6 m3,相对误差m最大为21.9%,最小为14.6%,平台检测值与人工测量值相差不大,能够满足实际需求。表4
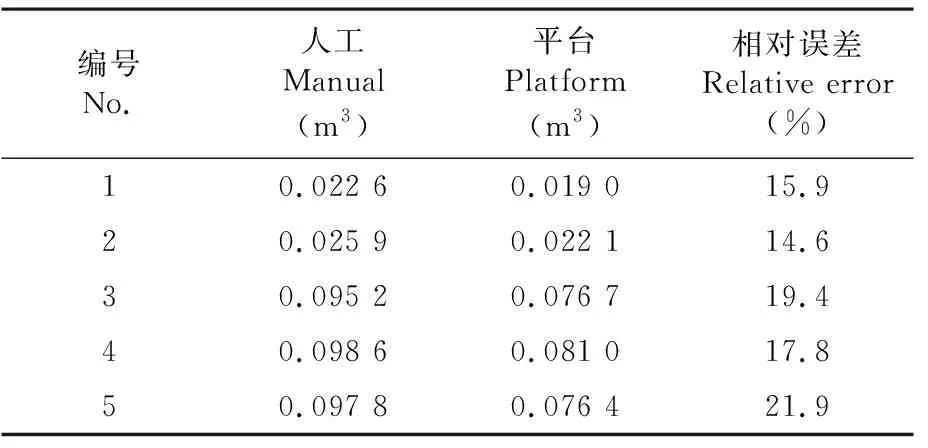
表4 人工测量与平台检测体积对比Table 4 Comparison table between manual measurement and platform detection volume
3 讨 论
利用激光雷达进行植物冠层数据的分析已经具备较大的发展潜力,激光雷达能够快速直接获取植物冠层形状,信息准确度较高,受外界环境影响较小,是其他技术无法比拟的优势。在实际的使用中,激光雷达在使用时需要保证一定的稳定性,减少因为振动而造成的噪点过多,从而影响数据的准确性。
采用平面拟合算法对地面进行分割时对地形的要求较高,若地形起伏较大,则产生的误差较大。采用均值漂移算法进行单株番茄植株的分割时,当植株枝叶过于茂密,相邻植株间交织严重,激光雷达获取的点云密集,从而无法通过点云特征处理,应根据不同作物的生长状况,采用不同的分类方法对单个植物进行分割[30]。通过alpha shape算法获得的植株体积小于使用凸包算法获取的体积,是因为alpha shape算法能够减少冠层间空隙带来的影响。
4 结 论
4.1温室环境中,作物状态较为稳定,受外界环境影响较小,相比于大田环境更加适合使用检测平台,检测平台在前进方向与垂直前进方向的测量误差分别为-2.65%、-3.95%。
4.2采用基于平面拟合和均值漂移算法以实现从点云中分割地面和从番茄行中分割单株番茄点云,与人工测量冠层数据值相比,A、B 2组的均方根误差RMSE分别为0.039和0.043,平均绝对误差分别为0.025和0.031 m,均取得了较好的结果。
4.3对单株点云使用alpha shape算法进行重建并进行体积的计算,平均绝对误差为0.009 4 m3,与凸包算法获得结果相比,平均相对误差下降了约15.3%,与人工获取相比,VRMSE为0.015,最大相对误差为21.9%,最小相对误差为14.6%,该结果与实际值相差不大。
