防相撞技术发展综述与总体架构
2021-11-17刘志刚田宏安李洪伟
刘志刚 田宏安 李洪伟
(1.四川九洲电器集团有限责任公司,四川绵阳 621000;2.四川九洲空管科技有限责任公司,四川绵阳 621000)
0.引言
空域飞行安全的3个层面:规划层、战略层、战术层。规划层从空域管理、运行、飞行程序上,尽最大可能在宏观上避免飞行矛盾;战略层在中观上进行空中交通管理和自主间隔保持,管制员或飞行员借助地面和机载设备监视飞行活动,防止违规飞行和违反间隔标准;战术层在微观上进行机载防撞规避,通过机载设备实时掌握周围环境态势,确保飞机不会与其他飞行器和地面碰撞,不会进入危及飞行安全的恶劣气象区域和特殊限制空域。机载防撞独立于地面交通管制系统,是防止空中相撞事故发生的最后防线[1]。
1.民机防撞TCAS /ISS
随着电子器件和航空电子系统模块化(IMA)的发展,空管监视防撞技术也由单一监视功能向综合监视技术发展。综合监视系统减小了设备体积、重量和功耗,提升设备可靠性、可更换性及易维护性,正在替代单一功能TCAS,成为大中型运输机、轰炸机的主流配置。
ARINC组织2011年发布升级版本ARINC768-2《综合监视系统(ISS)最低性能标准》,该标准定义了4种构型的ISS,见表1。
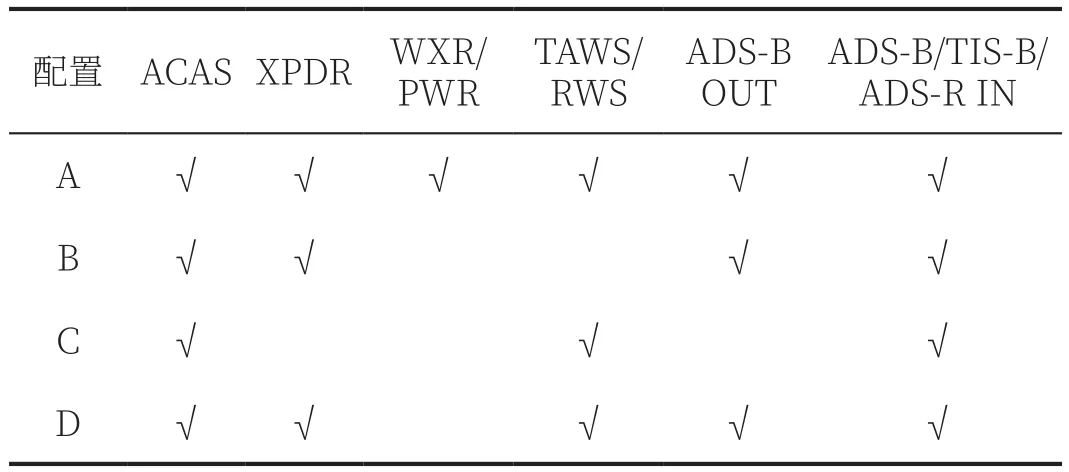
表1 ISS构型
当前国际上的主流产品主要采用A构型和D构型,如Honeywell公司和Collins公司产品符合A构型,Thales产品符合D构型。
2.战机防撞 Auto-CAS
为降低战机飞行事故率,美国国防部完成自动空中防撞系统(Auto-ACAS)系统的研制和试验。后续阶段,Auto-ACAS和Auto-GCAS(自动防撞地系统)将集成到一个统一的自动防撞(Auto-CAS)系统中。
Auto-ACAS与传统的民航机载防撞系统(TCAS)不同,Auto-ACAS是一套基于软件算法的飞机防撞系统。在飞行员手动防撞机动失败的情况下由Auto-ACAS接管操作,在两架飞机碰撞前的最后瞬间实现自动防撞[2]。
与TCAS只能垂直避撞不同,Auto-ACAS基于数据链通信完成多机间的自动避撞操作,飞机通常采取垂直方向、水平方向,或者垂直和水平方向组合的机动措施来避撞。机动措施包括拉升、向左滚转并拉升和向右滚转并拉升3种。在两架飞机规避机动时会产生9种可能的机动组合。对于各种机动操作组合,计算两架飞机飞行线路之间的最小间隔,其中最小间隔值最大的机动组合为最优方案。
Auto-ACAS系统的功能结构如图1所示。

图1 Auto-ACAS系统功能结构框图
Auto-GCAS是基于精确导航和数字地形数据的软件系统,飞行员将飞行轨迹叠加到数字地形图上,通过将飞机已知的、预测的位置与飞机前方的地形图进行比对,确定飞行轨迹是否有与地面或其他障碍物(高山)等发生碰撞的趋势。当飞行员丧失判断力或遭遇高过载意识丧失时,系统会进行干预。如图2所示,在机载计算机控制飞机5s之前,系统将发出警报,如果飞行员不能在1.5s内做出反应,Auto-GCAS将自行控制飞机,首先迅速将飞机翻转至机翼水平状态,之后进行过载5g的拉起动作,飞机状态恢复稳定后计算机将控制权交还飞行员。

图2 Auto-GCAS系统可在飞机碰撞前自动拉起飞机
3.新一代防撞系统ACAS X
ACAS X是FAA于2008年资助研究开发的一种最终将取代TCASⅡ的新型机载防撞方案,它兼容了SESAR和Next-Gen的未来运行概念。基于概率模型的ACAS X可提供未来飞机位置的统计表示法,在考虑系统安全操作目标的同时,实现了逻辑定制特殊程序或空域配置。相比TCASⅡ而言,ACAS X在降低升级与维护成本同时,可将碰撞风险降低约50%,升级更快速便捷。
3.1 ACAS X工作原理
TCASⅡ与ACAS X当前概念之间存在两个关键差异,即防撞原理和监视数据源。在确定入侵飞机当前和未来预计位置时,TCASⅡ比较依赖使用机载应答机的询问机制。如果所跟踪的飞机被认为有威胁并同样配有TCASⅡ,两套TCASⅡ将进行协调并发出补充咨询。当前的TCASⅡ咨询原理是根据飞行最近交会时间和预定交会距离,针对潜在威胁发出告警[3]。
ACAS X并未使用硬件编码规则,而是采用基于数字查找表的告警原理,并优化了基于概率的空域模型和一套安全操作注意事项。与TCASⅡ仅依靠基于应答机的监视不同,ACAS X可以兼容符合规定性能标准的任何监视源(或监视源组合),这种概念被称作“即插即用”监视,可使ACAS X获取各种来源的监视数据,如卫星、雷达、红外和光电监视系统等,并且其中一些监视源还可用于支持无人机对未装应答机飞机的感知和规避。ACAS X工作原理如图3所示。

图3 ACAS X工作原理图
除了标准的ACAS X(ACAS XA),还有其他版本的ACAS X,ACAS X的4种版本见表2,从而将防撞保护扩展到了目前TCAS Ⅱ无法顾及的情况和用户。

表2 ACAS X的4种版本
3.2 ACAS X的处理过程
ACAS X确保了与当前和未来CNS / ATM系统(包括TCAS II)的互操作性。ACAS X的作为下一代系统,致力于解决现有ACAS的设计方面的限制,提高安全性,降低虚警,满足规避操作的便利性以及考虑飞行员可接受的飞机性能。调整内部处理流程降低告警对ATC系统的影响,并且发布的告警可以更易于操作和执行。ACAS X的每个变体都支持一组不同的操作目标。它们将共同提高安全性,减少不必要的RA,并为新用户类提供防撞保护[4]。
ACAS X的处理链如图4所示。

图4 ACAS X处理链
3.2.1 ACAS Xa
ACAS Xa除了被动监视,还采用主动监视和协调,并结合全局威胁解决逻辑。它旨在替代TCAS II和ACAS II。ACAS Xa包括目标监视和防撞算法两大部分,设计为监视跟踪模块(STM)和威胁决断模块(TRM)。
3.2.2 监视跟踪模块STM
STM处理所有目标监视和本机数据,并按TRM需要的格式进行输出。STM输出到TRM的本机和目标机数据均附加一组不同权值的样本值,代表本机和目标机的位置不确定性,这些带有权值的样本值统称为置信状态。每个目标机都有水平和垂直位置的置信状态,本机只有垂直位置置信状态。各类位置的置信状态将输出到威胁决断模块(TRM)进行状态和价值估计,这是与TCASII的另外一个重要区别[5]。
入侵机垂直和本机的垂直置信状态包括海拔和海拔率的估计。提供五个“加权”样本。一个概率或权重为1/3的“中间”样本([z,dz])和四个权重为1/6的样本([z,dz+σdz],[z,dz-σdz],[z+σz,dz],[z-σz,dz])。这五个垂直西格玛样本(置信状态)代表垂直或高度分布。
入侵机水平置信状态包括相对x和y以及x和y的比率(dx,dy)。提供了九个“加权”样本。提供权重为1/3的一个中间样本([x,y,dx,dy])和在中间样本两侧的八个另外的样本,权重为1/12[6]。
STM用信息标记每个航迹,允许TRM确定航迹是否可用于仅生成RA和TA或TA。
3.2.3 威胁决断模块TRM
威胁决断模块接收监视跟踪模块输出接口的数据后,实现TA、RA、RA协同,并对目标机的威胁进行评估,最后确定显示告警的逻辑参数,其设计的总体架构图如图5所示。

图5 威胁决断模块架构图
TRM需要的本机相关输入包括:无线电高度、航向、S模式地址,以及设备垂直状态。本机垂直状态估计信息是一组本机垂直高度、高度率相关的置信状态量。TRM需要的目标机相关输入包括:目标S模式地址报告值、高度量化精度、TCAS设备状态、收到的垂直协同补充信息(VRC)。TRM的处理过程如图6所示。

图6 TRM的处理过程
4.结论
随着航空电子系统模块化(IMA)的发展,民机防撞由单一防撞TCAS系统发展为综合监视ISS系统,战机防撞Auto-CAS取得了积极进展。新一代防撞系统ACAS X的出现提高了效率和安全性,而且不同版本的ACAS X适合不同类型的飞机,满足不同的防撞需求,是防撞系统的发展方向。
