风载下高压直流巡检机器人磁力矩平衡方法
2021-11-17徐显金陈浩达胡世超
徐显金,陈浩达,胡世超,严 宇
(1.湖北工业大学机械工程学院,湖北 武汉 430068;2.国网湖南省电力公司带电巡检与智能作业技术国网公司实验室,湖南 长沙 410004)
1 引言
随着各国电力部门对机器人巡护高压、超高压输电线路需求的增长,日本[1]、美国、加拿大等国家先后开展了高压线路巡检机器人的研究,其中代表性的作品有:加拿大魁北克水电研究院的“LineScout”巡检机器人[2-4],日本HiBot公司Paulo Debenest等人研制出的“Expliner”巡检机器人[5]。自20世纪90年代起,国内有关机构相继展开了输电线路巡检机器人相关技术的研发工作(中科院自动化研究所等[6-9]单位),并取得突破性进展,如中国科学院沈阳自动化研究所研发的地线上行走的转臂式两臂巡检机器人[10],具备越障和爬坡功能。相比传统巡检方法,机器人巡检具有能够对线路实时在线监控、安全可靠、管理便捷、续航能力长等优点。
高压输电线路一般架设在人烟稀少的空旷地带。巡检机器人在工作时,容易要受到风、冰雪和高温等环境因素的影响,其中风力影响最为频繁。风作用于架空线路上行驶的巡检机器人,在机器人机体上形成风压,产生水平方向上的载荷,风速越大,风压随之增大,风载荷也越大;当风速过大时,机器人机身摇摆幅度变大,机身稳定性变差,这样不仅使机器人变得难以控制,大大降低巡检作业的安全性和效率,并加大了机器人的能源负担,且容易对行走轮和线路造成有害磨损,对机器人机身稳定性与作业安全性造成较大影响。目前,国内外所研究的巡检机器人较少有涉及到风载对其工作影响,文献[11]分析了机器人结构尺寸对其受风载荷大小影响,并对尺寸参数进行重新设计与优化;文献[12]提出一种风载荷下巡检机器人姿态检测与作业优化方法,但它们其并未从根本上解决风载荷的影响。
在文献[13-14]的基础上,本文提出一种磁力矩平衡方法,为使高压直流巡检机器人在高空作业中保持稳定的姿态,建立了一种磁力矩模型来平衡风载荷产生的风力矩;当机体发生倾斜时,通过控制磁力矩装置的线圈电流产生一个与风力矩大小相等、作用相反的磁力矩,维持机体在平衡稳定状态,从而消除风载下机器人的打滑和磨损问题。作者依据理论设计了磁力矩系统物理模型;在60m架空输电线路的工作环境下对巡检机器人进行了受力分析,建立了风荷载下机器人的受力模型,然后运用流固耦合的方法对机器人所受的风力矩进行了仿真分析;最后,对磁力矩装置模型进行仿真分析,通过仿真值与理论计算值的对比,验证了该方法理论的正确性。
2 磁力矩平衡实现原理
2.1 磁力矩装置模型
磁力矩装置模型结构如图1所示,为配合巡检机器人越障时的开合动作(如图2所示),将磁力矩装置设计成关于高压线左右对称的左机体和右机体,通电线圈分别缠绕在磁力矩装置的左、右机体的凸台上。利用高压线周围产生方向确定的环形磁场的特性,在高压线周围合理地布置通电线圈,使线圈在环形磁场中产生安培力;线圈在高压线周围磁场中产生的安培力力矩很小,不足以克服风载荷产生的风力矩,使机器人平稳运行于高压线上,因此利用强导磁材料的强导磁、聚磁特性,设计特殊的外型结构(如图3所示)来改变磁感线方向,增大载流线圈在磁场中所受的安培力力矩,从而达到克服风载荷作用的要求。

图1 磁力矩装置模型
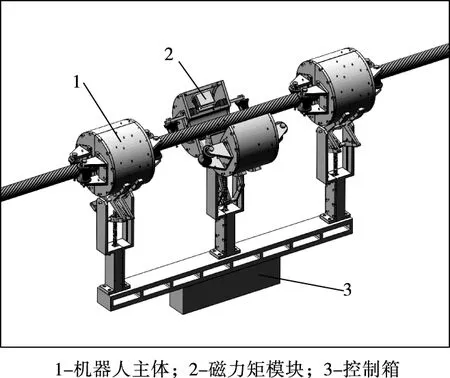
图2 巡检机器人的整体结构
2.2 磁力矩平衡原理分析
磁力矩装置的作用是为巡检机器人提供克服风载荷的力矩,其磁芯结构如图3所示,磁芯把高压线周围的环形磁感线诱导为沿着磁芯外型结构的磁感线,为使通电线圈产生的力矩最大,将所有线圈都布置于高压线直径延长线方向,使其所受安培力垂直于高压线直径方向,其任意两边夹角为α。强导磁磁材料因其强导磁特性,将高压线磁场强度大幅提高,使嵌入在强导磁材料中的通电导线受到较大的安培力,产生足够的磁力矩以克服风力矩。缠绕在磁力矩装置的线圈所受安培力如图4所示。
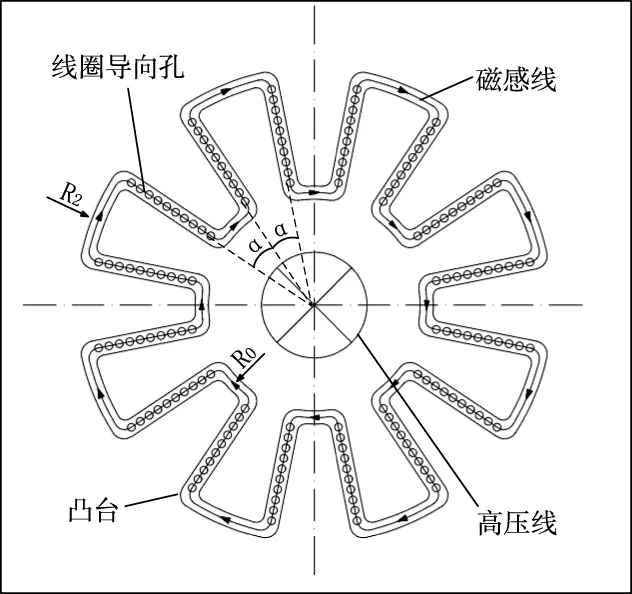
图3 磁力矩装置原理图

图4 磁力矩装置受力图
通电线圈在经过强导磁材料诱导的高压线磁场中受到安培力作用,根据安培定律可得任一凸台上的第i个通电线圈所受的安培力为
Fi=2BI0Lsinθ
(1)
由于强导磁材料的强导磁、聚磁作用,使穿插于凸台导向孔中的通电线圈周围磁场大幅提高,所在磁场强度为
(2)
因为通电线圈与经过诱导后磁场的磁感线相互垂直,即θ等于90°,所以每个线圈置于强导磁材料中的边所受的安培力为

(3)
式(3)中,ur为软磁材料的相对磁导率,u0为空气磁导率(u0=4π×10-7H/m),I0为线圈电流,I1为高压线电流,L为磁力矩装置厚度,R1为线圈两受力边与高压线的距离。则该线圈产生的磁力矩为

(4)
通电线圈的其余两边分别置于空气中,因空气中磁导率u0很小,这两边在高压线产生磁场中所受安培力很小,其对磁力矩装置的影响可忽略不计。
由式(4)可知,磁力矩Mi与距离R1无关,即每个通电线圈受力边所产生的力矩大小相等。假设磁力矩装置的凸台数为m,每个凸台上线圈个数为n,则整个磁力矩装置所受的力矩为
(5)
3 风载荷分析
3.1 风载下机器人受力模型与风力分析
巡检机器人在工作中受风力影响较为频繁,其中横风对机器人姿态的影响最大。因此,分析风载荷对于在架空高压线路上作业的巡检机器人的影响,具有实际的研究意义。结合巡检机器人在60m架空输电线路作业环境,建立风载荷下巡检机器人受力模型,如图5所示。风载荷下,机器人所受风力可分解为x,y,z三个方向的分力:横向风力Fx,竖直方向分力Fy,平行于线路方向的分力Fz。其中,横向风力Fx,竖直方向分力Fy对机器人影响较大,引起机器人在x,y两个方向的扰动,分别是以线路为中心的左右横向摆动和上下振动;分力Fz与机器人运行方向同向或逆向,主要对机器人沿高压线运行的速度、加速度有影响。

图5 风载荷下机器人受力模型
已知机器人总质量m=30kg,在不考虑极端条件高压线随风摆动的情况下,一般风速下由风载荷引起的竖直方向分力Fy< (6) 式中,ρ为空气密度,通常下取1.225kg/m3;α为风速不均匀系数;K为空气动力学系数;Kh为高空风速增大系数;A为受风投影面积,单位为m2;v为风速,单位为m/s。 在60m高度的架空输电线路作业环境中,空气动力学系数K=1.3,高空风速增大系数Kh=1.31,风速不均匀系数α与风速有关[15],见表1。 表1 风速不均匀系数 当风级超过6级时,高压线摆幅无法满足机器人的工作条件。为了计算巡检机器人行驶过程中不同风级下风力对机器人的最大影响,风速v取风力6级时地面风速的最大值13.8m/s,将风速不均匀系数α取1.0代入式(6)中化简得: Fx=198.65A 为便于分析,对复杂的巡检机器人结构进行合理的等效简化,将分析无关或关系较小的部件删除,简化后如图6所示。假设机器人左右完全对称,计算风载荷下机器人所受横向风力Fx,及其产生的风力矩M风。显然,开合机构关于线路上下对称,风载荷作用在其上产生的力矩相互抵消,所以这部分面积不计入计算。测得巡检机器人的受风投影面积A=0.089m2,则机器人在6级风力、地面最大风速13.8m/s下,机器人承受的横向风力Fxmax=17.679N,Fxmax是巡检机器人在线路上正常作业所能承受的最大的风载荷值。 图6 巡检机器人简图 在风载荷作用下,横向风力Fx产生的风力矩M风会使机器人姿态发生偏转,特别是在上坡路段运行时,会导致静摩擦力不足以克服重力而导致打滑,增大行走轮与高压线之间的摩擦,减小行走轮的使用寿命,加大系统能耗。在越障过程中,过大幅度的摆动可能会造成行走轮脱离导线道路,甚至机器人摔落,导致巡检作业失败。 运用AnsysWorkbench17.0仿真软件,按照上节中简化的机器人结构在软件中建模,仿真采用单向流固耦合的分析方法[16-17]。然后应用CFX模块进行风载荷有限元分析,建立流场域,即创建一个模拟六级风速并将机器人包裹的风场环境;其次再对机器人运用Static Structure模块进行静力学有限元分析,将上一步计算求出的机器人表面风压转化为其受风表面的静压力,进而求得机器人在风载下所承受的风力矩M风。 风载荷分析时,将机器人模型抑制,只在流场区域生成网格,设置网格用途为CFD网格,求解器设置为CFX,网格生长方式为Patch conforming。静力分析时,将流场区域抑制,只对机器人模型生成网格,网格划分对分析结果十分重要,应尽量让划分的网格规则、网格畸变程度要小,如图7所示。网格共有638719个节点、377899个单元,平均网格质量为0.7826,平均网格畸变度为0.227,网格质量满足要求。 图7 网格划分后的机器人有限元模型 在CFX求解器中设置求解类型,选择无热传递,同时选择模型k-Epsilon,稳态求解。选择不可压缩空气为流体材料,设置流体的材料为25℃空气;然后设置边界条件的各项参数,定义入口条件Inlet,设置normal speed为13.8m/s,定义出口条件Outlet,压力为0Pa;流场域四周设置设置成壁,即为Wall,机器人也设置成壁,模拟其固体的属性。求解计算后机器人表面压力云图及流线图如图8所示。 图8 机器人表面压力云图及流线图 将风场分析的结果数据传递到Static Structure中进行结构静力分析,在求解器中定义材料属性;设置流固耦合面,将机器人所有与风接触的外表面设置为耦合面,使流体域与固体域之间顺利完成数据传递;给机器人上部圆筒内壁施加固定约束,模拟机器人风载平衡时的状态;求解后得到风力矩M风=3.35N·m。在基本参数及网格划分方法不变的情况下,再对机器人模型进行单独的结构静力分析,将横向风力Fxmax=17.679N设置为面压力代入仿真计算得力矩为3.84N·m。单独静力分析得到的力矩比单向流固耦合分析的结果大,是因为模型没有完全等效简化,造成受风投影面积减小。 为了验证磁力矩装置模型理论分析的正确性,将各参数实例化。取高压电流I0=1000A,高压线外电流密度为1000/(0.02×0.02π)A/m2,磁力矩装置内径R0=0.04m,外径R2=0.09m,壁厚为0.005m,夹角α=22.5°,凸台个数m=8,强导磁材料材料采用MnZn铁氧体,相对磁导率ur取1000N/A2,线圈电流I1=10A,线圈外电流密度为10/(0.0015×0.0015π)A/m2,磁力矩装置的长度L=0.02m,线圈截面半径r=0.0015m,为便于仿真分析,将实体模型中缠绕的线圈等效简化为单独的线圈。在上述条件下建立仿真物理模型。 利用COMSOL软件进行仿真,选择物理场为磁场,设定磁力矩装置模型材料属性,网格划分采用自由剖分三角形网格极端细化的划分方式;通过设定自动计算电流及选择稳态求解器直接求解方式进行模型求解计算。基于仿真物理模型参数的设定,拟取线圈数n分别为2、4、6、8、10。如图9所示,线圈数分别取2和8情况下的磁力矩装置模型仿真截面图。 图9 不同线圈数仿真截面图 从图9中可以看出,嵌入在强导磁材料中线圈的磁场强度远大于置于空气中线圈的磁场强度;磁芯把高压线周围的环形磁场诱导为绕磁芯外型结构的磁感线,使其受到围绕高压线旋转的转矩。该仿真结果与理论分析基本-致,证明了本文提出方法的正确性。当n分别取2、4、6、8、10时,仿真力矩Ms与理论计算结果M总如表2所示。 表2 不同线圈个数下的仿真磁力矩 由表2可知,随着线圈数n的增加,仿真力矩与理论力矩的误差越来越大,这是因为理论分析过程中没有考虑磁耦合效应,而且随着n的增加,线圈分布越来越密集,磁耦合效应愈发严重,导致线圈周围磁场强度比理论强度小;从仿真图中的面箭头可以看出,磁感线并不是完全沿着理论预期的轨迹,这是导致误差的主要因素。 根据不同线圈个数所受的磁力矩,利用MATLAB软件拟合磁力矩装置所受力矩与线圈个数n之间存在的关系曲线图,如图10所示。 图10 力矩-线圈个数关系曲线 根据数据特性,采用二次多项式曲线类型拟合,得到力矩与线圈个数之间关系的多项式为 Ms=-0.0126n2+0.7125n-0.3428 (7) 将风载荷仿真结果M风=3.35N·m代入上式中,得n=5.772,即在六级风速下仅需每个凸台6个通电线圈,再通过调整线圈电流的大小即可满足平衡风力矩的要求。 针对高压直流巡检机器人高空作业过程中易受风载荷影响,本文提出了一种基于高压直流磁场的磁力矩平衡方法,根据高压直流输电线路周围的磁场及强导磁材料的强导磁、聚磁特性建立了磁力矩装置模型,通过理论计算证明在该模型下磁力矩的存在;建立了风载下机器人的受力模型,并分析了风载荷对其影响;然后机器人模型分别在风场与磁场下进行了仿真分析,仿真结果证明了方法的正确性。鉴于仿真结果出现的偏差,磁芯部分的设计有待优化改进,同时,该模型设计能够满足多种条件的使用要求,可以通过改变线圈电流方向来改变力矩方向,也可以改变线圈的电流大小来满足不同风力下所需磁力矩的大小。

3.2 巡检机器人受风载荷影响分析
4 风载荷的仿真分析
4.1 建立有限元仿真模型
4.2 仿真分析

5 磁力矩仿真分析
5.1 建立仿真物理模型
5.2 仿真分析


6 结论