基于振动特征的火炮身管打击精度控制仿真
2021-11-17尉青锋陈末然
欧 攀,尉青锋,陈末然
(北京航空航天大学仪器科学与光电工程学院,北京100191)
1 引言
火炮武器具有造价低廉、杀伤力大、弹药种类丰富、战斗力强、维护简便、目标特征小、操作简单、抗干扰能力强、可靠性高和攻防性能兼备的特点,在现代战争和未来战争中是不能用其它武器代替的,地位极高[1-2]。火炮发射属于瞬时、高能、强冲击的复杂过程,火炮会受到瞬时多变的载荷影响,使火炮身管出现剧烈振动,对炮口指向和射弹散布产生影响,进而影响火炮的射击稳定性和设计精度,使火炮身管打击精度控制方法成为目前亟需解决的问题[3-4]。当前火炮身管打击精度控制方法存在控制效率低和控制精度低的问题,需要对火炮身管打击精度控制方法进行研究。
基于自适应神经网络的身管打击精度控制方法通过ABAQUS有限元软件构建火炮有限元模型,获取高低温压力曲线,根据曲线提取身管打击精度控制的目标值,构建设计变量与控制目标值之间的自适应神经网络模型,将罚函数作为模型的约束条件,利用遗传算法求解神经网络模型,获取模型最优解,实现火炮身管打击精度的控制,该方法构建神经网络模型所用的时间较长,存在控制效率低的问题[5]。基于系统可控性的火炮身管打击精度控制方法通过ANSYS构建火炮身管对应的振动模型,在惯性矩载荷和惯性载荷的条件下分析火炮身管的振动情况,以及设计准确度受应变速度和管末端应变速度的影响,根据分析结果通过最优指标搜索算法实现火炮身管打击精度的控制,该方法控制后的火炮身管仍存在位移差,控制精度较低[6]。基于坐标变换法的身管打击精度控制方法在地理坐标系中利用四元数法将捷联惯导测量值转换到车体坐标系中,获取高低向调转和方位向调转误差,联合电动机驱动系统和位置控制器实现火炮身管打击精度的控制,该方法进行坐标系转换所用的时间较长,存在控制效率低的问题[7]。
为了解决上述方法中存在的问题,提出基于振动特征的火炮身管打击精度控制方法,以振动特征分析火炮偏移轨迹,结合粒子群优化算法实现火炮的偏移校正,有效提升火炮的打击精度控制。
2 火炮发射动力学模型
2.1 后座运动
在火炮设计理论的基础上分析火炮发射过程中后部分的受力。后座部分在火炮设计过程中沿摇架导轨进行复进、后座运动。
设φ代表的是炮身在火炮设计过程中的仰角;Fpt代表的是火炮后坐部分在设计过程中受到的主动力在炮膛轴线上产生的炮膛合力;mhg代表的是后坐部分对应的重力;FN1、FN2描述的是摇架导轨对应的法向反力,是一种约束反力,作用在火炮的后坐部分中;FΦh代表的是作用在后坐部分中的阻力有制退机力;F代表的是反后坐装置密封装置对应的摩擦力;Ff代表的是复进机力;FT1、FT2代表的是摇架导轨对应的摩擦力。
在牛顿第二定律的基础上,将炮膛轴线作为x轴,得到后坐运动过程中后坐部分对应的制退后坐运动方程

(1)
将上式转变为下式

(2)
式中,FR代表的是后坐阻力,描述的是一个合力,其方向与炮膛合力相反,其计算公式被称为后坐阻力方程,表达式如下
FR=FΦh+Ff+F+FT-mhgsinφ
(3)
相关参数计算:
在火炮设计理论的基础上计算炮膛合力

(4)
式中,p描述的是火药气体对应的平均压力;φp代表的是次要功系数;S代表的是炮膛断面积;tg代表的是炮口内瞬时飞出弹丸的时刻;χ代表的是炮口退制器对应的冲量特征量;Pg代表的是炮口飞出弹丸时对应的瞬时炮膛合力;tk代表的是结束后效期的时刻;b代表的是火药气体时间常数。
分析后坐阻力方程可知,计算后坐阻力的过程包括重力分量、制退机液压阻力、摇架导轨摩擦力、密封装置摩擦力以及复进机力[8]。
1)制退机液压阻力
设A1代表的是最小支流截面面积;dT代表的是制退杆外径;ax代表的是流液孔面积;DT代表的是制退筒对应的内径;dx代表的是节制杆外径;dp代表的是节制环对应的内径;d1代表的是制退杆对应的内径,制退机液压阻力FΦh的计算公式如下

(5)
式中,K1、K2代表的是制退机对应的液压阻力系数;A0、Ap、Afj、A1均为制退机调节系数;ρ代表的是液体对应的密度;v代表的是后坐速度。
2)复进机力
设df代表的是复进杆对应的直径;Df代表的是复进机内筒对应的内径,复进机力Ff的计算公式如下

(6)
式中,V0代表的是气体在复进机内的初始体积;Pf0代表的是气体在复进机内的初始压力;n代表的是多变指数,由活塞运动速度和复进机散热条件决定[9];x代表的是后坐位移。
3)摇架导轨摩擦力
摇架导轨摩擦力FT的计算公式如下
FT=μmgcosφ
(7)
式中,μ代表的是摩擦系数。
2.2复进运动
在炮膛轴线方向中,利用牛顿第二定律构建火炮后坐部分对应的运动微分方程

(8)

Fφf=Fφfj+Fφfz
(9)
式中,Fφfz代表的是制退机液压阻力;Fφfj代表的是复进节制器对应的液压阻力。
制退机在第二阶段的复进运动,即为非工作腔消失后的运动,存在下式

(10)
式中,K1f代表的是液压阻力系数;A0f代表的是制动机的调节系数;ax代表的是流液孔面积。
3 火炮身管打击精度控制方法
3.1 火炮身管振动特征
火炮身管通常安置在坦克炮塔上,是一个弹性体,在外力作用下火炮身管主要在以下几个方向中发生振动变形,分别在火炮轴线垂直面方向、火炮轴线方向和半径方向发生横向振动、纵向振动和径向振动。火炮身管在进行模态分析过程中近似桶装结构,可以将其简化为悬臂梁结构,结构如图1所示。

图1 火炮身管简化模型
图中的x轴为火炮身管轴线的方向;y轴为火炮身管轴线垂直方向,在右手定则的基础上确定z轴。
在火炮身管M上选取一个单元体,其体积极小,设u代表的是单元体对应的径向位移,其表达式如下
u=f(r,t)
(11)
式中,t代表的是时间;r代表的是火炮身管内径。
根据单元点的径向位移构建火炮在径向中身管振动对应的微分方程

(12)
式中,cr代表的是振动在径向中传播时对应的速度。
x轴方向中所有单元体的移动形成火炮身管在纵向中的振动,选取身管纵向振动中的一小段微元dx,获得如下微分方程

(13)
式中,m代表的是微元对应的质量;T代表的是微元截面中存在的纵向力;u代表的是微元对应的位移;Q(x,t)代表的是分布在x轴方向中的荷载。
纵向力T的计算公式如下

(14)
式中,A代表的是火炮身管对应的截面面积;E代表的是弹性模量;σ描述的是应力;s为轴向刚度;ε为应变。
火炮射击精度受身管横向振动的影响最为严重,对微元dx进行受力分析,根据梁的静挠曲变形构建横向振动对应的微分方程

(15)
式中,M代表的是截面对应的弯矩;J代表的是微元对应的惯性矩。
对上式做微分处理获得下式
(16)

(17)
式中,g代表的是重力加速度;γ代表的是材料密度;Q代表的是剪力,整理上式
(18)

(19)
通过上述分析可知,火炮射击的稳定性受身管纵向和径向振动的影响较小,身管的横向振动对火炮身管打击精度产生的影响最大,其中振动的来源包括身管的弯曲、动力作用以及撞击作用。
3.2 PID控制器
基于振动特性的火炮身管打击精度控制方法通过粒子群优化算法根据火炮身管的振动特性优化设计PID控制器的参数kp、ki、kd。
协调PID控制器的关键是优化参数kp、ki、kd,基于振动特性的火炮身管打击精度控制方法通过粒子群优化算法获取上述参数在PID控制器中的最佳组合,利用优化后的PID控制器实现火炮身管打击精度的控制,具体过程如下:
1)适应度函数。在特定目标函数的基础上寻找最优参数的过程就是控制器参数整定的原理。在过渡过程中沿时间轴方向系统偏差量对应的积分即为系统偏差对应的积分性能指标,是一种目标函数可以有效的描述系统的性能,通过积分性能指标获取的最佳参数可以缩短系统的响应时间、提高系统的稳定性[10]。
基于振动特征的火炮身管打击精度控制方法选用的适应度函数为时间乘绝对误差积ITAE

(20)
2)设置参数:参数ki和参数参数kd在区间[0 10]内取值。
3)算法实现:通过下述公式确定粒子群的位置和速度
xx+1=xt+vt+1
(21)
vt+1=ωvt+c1r1(pt-xt)+c2r2(gt-xt)
(22)
式中,v、x分别代表的是粒子对应的速度和位置;c1、c2为常数;ω代表的是惯性因子;r1、r2为随机数,在区间[0,1]内取值;gt代表的是粒子群搜索获得的最优位置;pt代表的是粒子搜索得到的最优位置。
通过上述过程得到优化后的性能指标和最优控制器参数

(23)
利用优化后的PID控制器实现火炮身管打击精度的控制。
4 实验结果与分析
为了验证基于振动特性的火炮身管打击精度控制方法的整体有效性,需要对基于振动特性的火炮身管打击精度控制方法进行测试,本次测试的实验平台为Simulink,实验软件为MyEclipse8.6。
4.1 实验参数
本文采用152加农榴弹炮进行模式实验,实验实物图如图2所示。
给出上述型号的相关参数如表1所示。

表1 152加农榴弹炮相关参数
4.2 偏移矫正
火炮发射过程中由于气体的压力等因素的影响会产生偏移造成打击目标发生偏移,使打击火炮精度差,为此,本文通过分析振动特性进行横向、纵向偏移矫正,矫正结果如下所示。其中,纵向偏移:以火炮发射的水平高度为偏移中心位置,高度高于此位置为正,高度低于此位置为负;横向偏移:方向偏左为正,方向偏右为负。
分析图3可知,在前4μs内,火炮未发生横向偏移与纵向偏移,随着时间的增加,首先发生横向偏移,当到达5μs,随之发生纵向偏移,此时已经对火炮精度产生细微的影响,但随着时间的推移,横向、纵向偏移都快速增大,是火炮精度降低。而本文方法可以就偏移进行自主矫正,使经过偏移得到修正,有效提高火炮精度。

图3 偏移矫正结果
4.3 控制时间对比
为了进一步验证基于振动特征的火炮身管打击精度控制方法的整体有效性,对不同方法下控制时间进行验证,结果如图4所示。
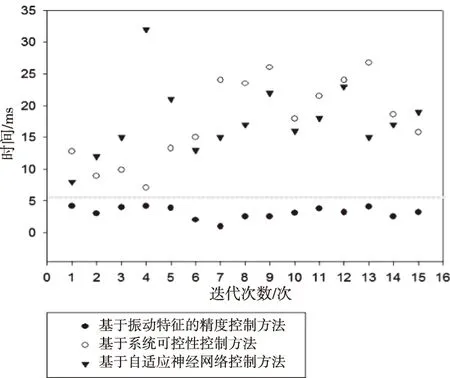
图4 不同方法下控制时间
分析图4可知,三种不同的控制方法具有不同的控制时间,基于系统可控性控制方法的控制时间在7~27 ms范围内浮动;基于自适应神经网络控制方法控制时间在8~33 ms范围内浮动;而基于振动特征的控制方法控制时间不超过5 ms,速度较快,效果较好。基于振动特征的火炮身管打击精度控制方法能够在较短的时间内完成偏移矫正,提高火炮控制精度。因为基于振动特征的火炮身管打击精度控制方法在控制火炮身管打击精度之前构建了火炮发射动力学模型,分析了火炮身管的振动特性,为火炮身管打击精度的控制提供了相关信息,减少了控制火炮身管打击精度所用的时间,提高了基于振动特征的火炮身管打击精度控制方法的控制效率。
5 结束语
在射击过程中火炮身管受路面产生的激励、火药气体的压力、发动机的激励以及身管与弹丸的碰撞力的影响会产生振动,影响火炮身管的打击精度。当前精度控制方法存在控制精度低和控制效率低的问题,提出基于振动特征的火炮身管打击精度控制方法。
1)通过分析火炮身管的振动特征,对横向、纵向偏移进行矫正,本文方法控制时间不超过5 ms,能够自主偏移校正,实现了火炮身管打击精度的控制,解决了当前方法中存在的问题,提高了火炮身管的动态性能。
2)今后研究会将空气阻力考虑到打击偏移校正中,进一步提升火炮控制的精准度。