基于SMA丝驱动的仿生捕蝇草设计与实验研究
2021-11-16王扬威
李 健,闫 杰,王 敏,王扬威
(东北林业大学 机电工程学院,哈尔滨 150040)
0 引 言
我国林业资源有限,作为重点的保护对象,病虫害防治占据着极其重要的地位。随着社会的发展,对林业资源的保护方法也随着技术的进步而不断深入。在林业保护中,每年因病虫害威胁带来的经济损失高达150亿元,因此研究有效的病虫害防治方法和监管手段变得尤为重要[1]。目前主要通过化学方法、生物方法及物理方法来对病虫害进行防治。化学方法是通过施药对森林树木进行治理,治疗效果快速有效,但是会对森林的生态环境造成损伤;生物方法是通过引进害虫天敌进行防治,利用生物链之间的关系进行防治,但在使用时存在造成生物链失衡的风险;物理方法是通过“声、光、电、热”等物理手段对害虫进行诱杀,该方法是绿色防控技术,效果快速显著,得到了广泛应用。上述三种法病虫害防治方法和监管手段均受制于某些因素无法达到现阶段对于病虫害防治的相关目标与要求。因此研制自动捕虫装置,辅以信息素等技术,实现对于特定树木上的特定害虫,尤其是运动能力强的害虫的活体捕捉,对于虫情监测与防控研究具有重要意义。
形状记忆合金(以下简称SMA),是一种在加热升温后能完全消除其在较低温度下发生的变形、恢复其变形前原始形状的合金材料,即具有“记忆”效应的合金[2]。SMA的另外一种重要性质是伪弹性,又称为超弹性,表现为:在外力作用下,SMA具有比一般金属大得多的变形恢复能力,即在加载过程中产生的大应变会随着卸载而恢复。SMA丝集传感与驱动于一身,因而得到了广泛的研究及应用,其特点是结构简单、能够输出直线运动、功重比高[3]。
生物体经过上亿年的进化,具备了各具特色的运动能力和环境适应能力,某些生物具备的功能比迄今为止任何人工制造的机械都优越得多[4]。因此,越来越多的研究人员把研究目标转向生物界,希望可以通过对生物界某些具备特定功能的生物的研究,为生产生活作出指导。捕蝇草的叶片感触运动可以捕捉移动甚至飞翔的昆虫,恰好适合作为本文的仿生对象。
本文通过分析捕蝇草的动作特点,制定仿生目标,选择SMA丝作为驱动材料,研制基于SMA丝的仿生捕蝇草,设计制作仿生捕蝇草叶片,对仿生捕蝇草叶片进行理论建模与分析,并进行了性能实验和功能实验。
1 仿生捕蝇草叶片的设计与制作
1.1 捕蝇草的运动机理及运动学分析
有许多植物以虫子为食,例如捕蝇草。植物捕捉昆虫主要有引诱昆虫、捕捉昆虫、分解与吸收、维持自身生长4个步骤[5]。捕蝇草的捕捉过程极为复杂,对称的叶片通过叶柄相连接,其引诱虫子主要依靠叶片边缘的蜜腺所分泌的蜜汁[6]。昆虫被蜜汁吸引落在叶片上,当昆虫在一定时间内两次触碰位于捕虫夹内的触发绒毛时,叶片会迅速闭合(图1左)[7]。叶片边缘有规则状的刺毛,在叶片闭合时,刺毛正好交错排布,形成一个笼子,使昆虫无法逃出。且在刺毛的终端存在分泌粘液的系统,可以黏住昆虫,防止昆虫逃脱(图1右)。随后昆虫会被消化吸收,吸收的养分用来维持捕蝇草的自身生长[8]。
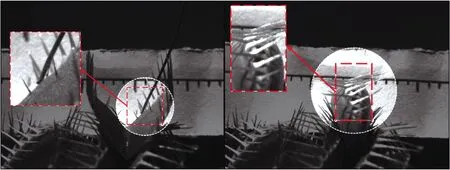
图1 触发绒毛(左)和刺毛(右)
捕蝇草的动作机制:捕蝇草叶片初始状态为向外侧弯曲,当内侧触发绒毛感受到机械刺激后,电信号会引起组织内离子的定向运动,形成化学势差,并引起水的流动,在水压的作用下细胞壁的缓慢变形,并存储了弹性势能,叶片的曲率逐渐变平[9];当水压到达一个临界阈值时,在几何约束的作用下,本体弹性势能突然释放并转换成动能,叶片快速屈曲,实现曲率从凸到凹的变化,引起的被动流可以提供粘性阻力以平衡弹性,持续的压力供给使得叶片保持在向内弯曲的状态[10]。
捕蝇草叶片的动作机制涉及植物生理学、化学、机械结构学、流体力学等诸多学科,本文主要从机械及力学的角度研究其宏观层面的运动学特性,并对其运动方式进行仿生化研究,在快速抓取及控制方面进行实验研究。
通常情况下捕蝇草的整个运动过程大概可以分为初始阶段、捕捉阶段、消化阶段3个阶段[11]。在初始阶段,捕蝇草的两个叶片呈张开状态,且对称分布,叶片的张开角度为58.2°,叶片顶间距为7.7 mm;在捕捉阶段,捕蝇草在一定时间间隔内受到两次刺激时,叶片迅速闭合,完成捕捉动作。捕蝇草能够在4~6 s内完成叶片的闭合(野生捕蝇草时间会更短,最快可在0.5 s内完成捕捉动作),刺毛相互交错,防治猎物逃脱,此时捕蝇草叶片并未完全闭合,而是进入消化阶段。在消化阶段,捕蝇草叶片缓慢闭合,直至猎物消化吸收完毕。
图2、图3分别为捕蝇草初始阶段和捕捉阶段的图象。
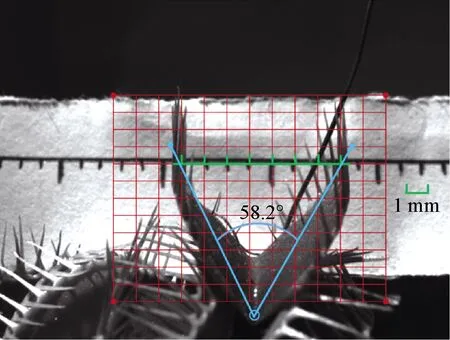
图2 捕蝇草初始状态
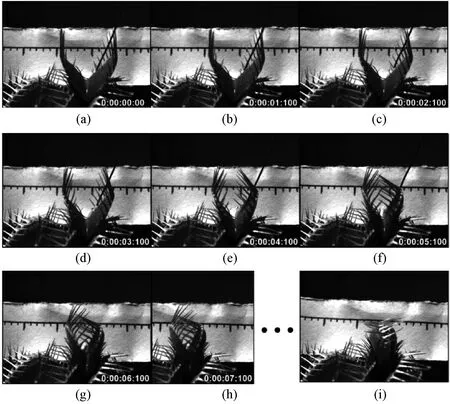
图3 捕蝇草捕捉过程
量化分析捕蝇草运动过程的各个阶段,我们得到捕蝇草在整个运动过程中叶片顶间距、角度及时间的数据,如表1所示。

表1 捕蝇草叶片顶间距与时间
图4为捕蝇草叶片顶间距与距离变化速率随时间变化曲线。通过对测得的数据进行分析,我们发现捕蝇草叶片可以在4~5 s内完成叶片的合拢动作,顶间距呈现递减趋势,变化速率呈现出抛物线趋势。在0~4 s时间内,捕蝇草的顶间距逐渐减小,变化速率呈现递增趋势;在第4 s时,捕蝇草的顶间距变化速率达到峰值,为1.53 mm/s;在4~7 s时,捕蝇草的顶间距变化速率呈现递减趋势,且逐渐进入平缓阶段,此时顶间距为3.67 mm,捕蝇草刺毛相互交错,捕捉阶段结束,进入消化阶段。直至消化阶段结束,捕蝇草叶片的顶间距,趋近于0。

图4 顶间距、距离变化速率与时间的关系曲线
图5为捕蝇草叶片张开角度及角度变化速率与时间的关系曲线。通过对测得的数据进行分析,我们发现捕蝇草在初始阶段的叶片张开角度为58.2°,在捕捉阶段,叶片的张开角度逐渐减小,当减小至27°左右时,叶片的角度变化趋于平缓。捕蝇草叶片的角度变化速率呈现抛物线趋势,在0~4 s时,捕蝇草叶片的角度逐渐减小,角度变化速率逐渐增加。在4 s时达到峰值,此时捕蝇草叶片的角度为36.6°,角度变化速率为11.5 rad/s。在4 s以后,捕蝇草叶片角度持续减小,角度变化速率逐渐减小,捕捉阶段结束后,捕蝇草的角度变化速率趋于平缓,角度逐渐减小,进入消化阶段。
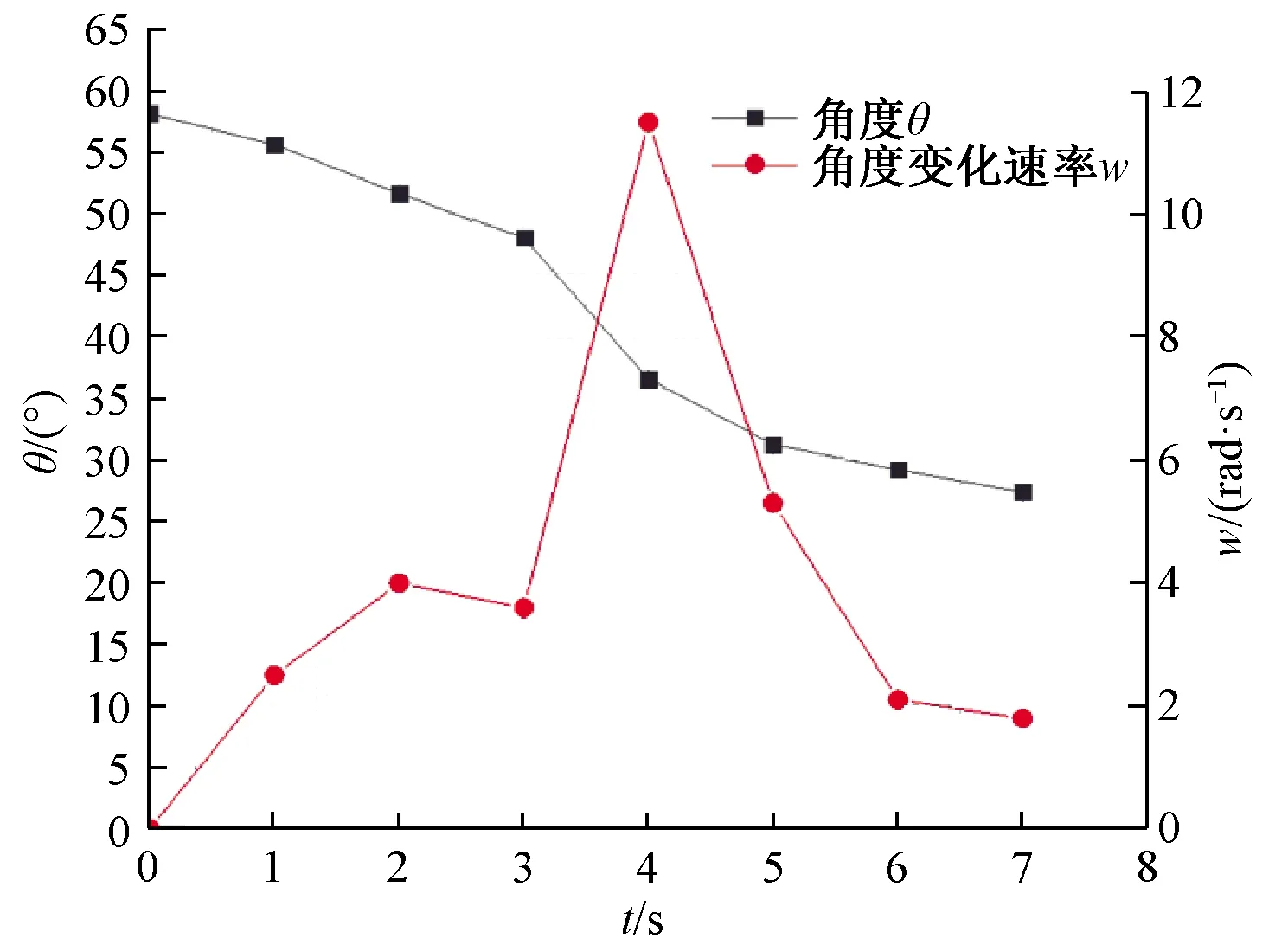
图5 角度与角度变化速率与时间的关系曲线
综合上述分析,捕蝇草在捕捉阶段,叶片的顶间距和角度逐渐减小,相应的变化速率呈现抛物线趋势,且均在4 s达到变化峰值,而后变化速率逐渐趋于平缓,在7 s进入消化阶段。在消化阶段,捕蝇草的顶间距和角度逐渐减小,直至顶间距和角度变化至零,此时捕蝇草叶片会继续保持一段时间(图3(i)),直至猎物消化完毕,才会张开叶片,进入下一次捕捉阶段。
1.2 仿生捕蝇草的仿生目标与设计要求
1.2.1 仿生目标
本文的设计与实验目标是运用仿生学知识,根据捕蝇草运动过程中的运动特点和捕蝇草叶片的结构特点,设计并制作一种仿生叶片。综合考虑仿生捕蝇草在捕捉猎物时的运动特性,设计了一种仿生捕蝇草,提出了以新型智能材料SMA丝作为驱动、以硅胶作为本体的新型仿生捕蝇草的设计、制作、控制方案。仿生捕蝇草叶片需要在特定环境要求下实现弯曲动作,完成捕捉任务。
1.2.2 设计要求
利用SMA丝作为驱动材料设计仿生捕蝇草,考虑到空间的特殊环境以及目标的非合作性,仿生捕蝇草需要满足以下设计要求:
1)质量轻,结构简单;
2)最大张开角度应不低于58°;
3)捕捉动作迅速,响应时间快;
4)对抓捕目标具有一定的适应性。
1.3 仿生捕蝇草叶片的结构设计与制作方法
根据设计结构的构思,运用绘图软件对捕蝇草叶片结构三维模型进行初步设计。捕蝇草叶片结构主要由SMA 丝、捕蝇草叶片本体、上下夹板及相应连接元件组成,如图6所示。捕蝇草的叶片采用超弹性材料硅胶通过模具浇注制作而成,且叶片内铺有SMA丝。SMA丝在仿生捕蝇草本体内部形成回路,通过上下夹板固定于硅胶两端。

图6 仿生捕蝇草叶片结构
需要考虑的主要因素有SMA 丝在叶片驱动器内壁的排布方式、SMA 丝在腔体驱动器内壁的固定方式、叶片壁厚、内腔形状及其结构尺寸、如何进行通电及通电参数的设置。
SMA丝在叶片驱动器内壁的排列方式有两种,一种为两端式,一种为全贴合式,如图7所示。考虑到仿生捕蝇草的设计初衷和两种排列方式的优缺点,本文采用全贴合式的布置方式,使其在满足变形条件的前提下,仍具有一定的变形恢复能力和环境适应能力。

图7 SMA丝布置方式
将仿生捕蝇草叶片的具体运动过程划分为如下三步:
(1)当叶片中的 SMA 丝未通电时,叶片本身不发生变形。
(2)当给 SMA 丝施加大小合适的电压时,SMA 丝收缩,带动叶片收缩。
(3)当 SMA 丝断电时,叶片形变恢复,重复以上控制步骤。
考虑到以上问题,采用硅胶浇注固化成型技术制作叶片,按照捕蝇草实物尺寸和形状确定捕蝇草叶片结构尺寸。硅胶具有流动性,叶片模具是曲面状态,为了确保硅胶充分填充并保持曲面形态,将模具分为上下两个部分,如图8所示。其中,上半部分设计两处凹槽,主要用于插板,板子上开孔,用于固定SMA丝。上半部分的模具上开小孔,主要用于浇注硅胶以及排出空气,使硅胶充分浇注。下半部分设计与上半部分对称的凹槽,用于板子的固定。上下板四周开孔,使用螺钉固定模具,上下两个部分配合,保证叶片形状,中间凸面为捕蝇草叶片形状。
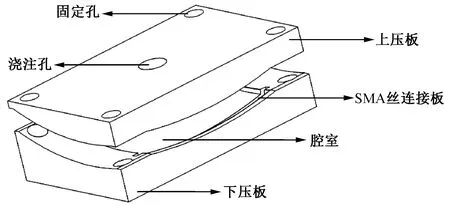
图8 仿生捕蝇草叶片模具结构示意图
根据前述仿生捕蝇草叶片的驱动原理可知,对叶片的控制实际上就是对SMA丝的驱动控制。控制好SMA 丝的应力和应变关系是关键,而上述特性是受温度影响的,因此问题就转化为设计控制系统来控制SMA丝的温度变化。引起SMA丝温度变化的方法是加热和冷却,其中加热包括内部加热和外部加热。内部加热主要是通过给SMA丝通电,将电能转化热能;而外部加热主要是通过水加热或辐射加热。冷却包括自然冷却、强迫对流冷却、半导体热泵冷却和热池冷却4种方法。综合考虑本文设计的仿生捕蝇草SMA驱动原理和空间条件,本文选用比较可靠方便的通电加热方法和自然冷却方法。
1.4 仿生捕蝇草的力学建模
基于SMA丝驱动的仿生捕蝇草叶片在设计初始,根据适量控制原理,共三组SMA丝在空间上合理分布,同时控制三组SMA丝的动作,使其能够完成仿生捕蝇草叶片的弯曲变形。在建立力学模型前,假设叶片弯曲变形结束后,叶片整体处于平衡状态,即仿生捕蝇草叶片本体和SMA丝以及相应连接元件均处于平衡状态。叶片本体一端固定,另外一端是自由端,在整体的变形弯曲过程中,不计自重。在叶片的变形过程中,以假想中性层为界,靠近SMA丝的一侧受到挤压,存在压应力;远离SMA丝的一侧受拉,存在拉应力。SMA 丝嵌入叶片中,当SMA丝加热时,SMA 丝将发生收缩,从而迫使仿生叶片产生类似于捕蝇草捕捉时的弯曲变形。本文认为任意一点的SMA的应力是相同的,并且到叶片凹面的距离是不变的,故可以认为SMA丝有一个不变的力矩。当叶片呈一定角度弯曲时,可以达到力矩平衡。基于上述假设,建立力学模型如图9所示,取仿生叶片的一个横截面做力学分析。根据叶片变形时的受力情况,可以得到平衡状态下的几个方程。
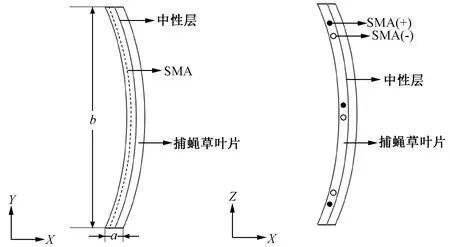
图9 仿生捕蝇草叶片力学模型示意图
当叶片呈一定角度弯曲时,可以达到力矩平衡,得到:
Wf=Wb+Wg
式中:Wf为SMA丝产生的力矩;Wb为硅胶产生的力矩;Wg为叶片凹面弯曲后产生的力矩。
Wf=8πσr2
(1)
(2)
Wg=kiθ
(3)
通过上式可以求出弯曲角度θ关于SMA丝收缩量的函数表达式:
(4)
式中:σ为SMA丝的拉应力(mPa);r为SMA丝的半径(m);E为SMA丝的弹性模量;Y为SMA丝短点的矢量距离;h为SMA丝弯曲的距离;ki为固定常数。
通过控制加热时间、通电电压、通电电流,可控制SMA丝的收缩量,依据矢量控制原理,实现叶片的不同角度弯曲变形。
2 仿生捕蝇草的性能实验研究
2.1 仿生捕蝇草的测试实验平台搭建
SMA丝通电后,在电流的作用下发热,当温度达到相应的相变温度时,SMA丝收缩。本文的控制任务相对简单,控制部分由系统电源、控制芯片、继电器等三部分组成,如图10所示。
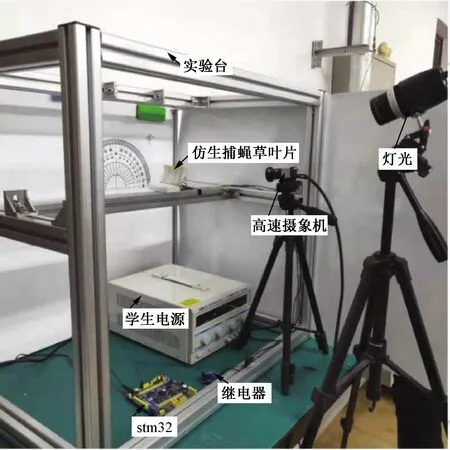
图10 实验测试平台
系统电源采用恒压恒流可调学生电源,为SMA丝提供电压以及电流,控制芯片控制继电器的通断,从而调节SMA丝的通电时间,以及电流的占空比。通过参数化设置电压、电流、通电时间以及占空比,研究分析参数对于捕蝇草叶片弯曲性能的影响,为捕蝇草叶片的捕捉实验提供控制参数。
2.2 仿生捕蝇草的性能实验研究
本文通过加热方式来控制SMA丝收缩,合适的加热时间、加热电压和加热电流是仿生捕蝇草叶片弯曲的基本保障。本小节将通过加热单侧3组SMA丝使其收缩,并驱动仿生捕蝇草叶片实现单次单侧的弯曲实验,记录实验中获取的参数进行研究分析。
通电加热仿生捕蝇草叶片的单侧SMA丝,记录不同加热时间下的仿生捕蝇草叶片弯曲的角度参数。采用六种不同的电压值来做单侧SMA丝的加热收缩实验,以100 ms为一个间隔,等间隔地增加加热时间。当无法驱动仿生捕蝇草或者仿生捕蝇草叶片内的SMA丝受损时,停止加热,以确定最佳控制参数。
分别将2 V、4 V、6 V、8 V、10 V、12 V作为加热电压,3 A作为加热电流,首次通电时间为50 ms,随后增加至100 ms、200 ms、300 ms、400 ms、500 ms,使用高速摄象机记录弯曲过程,随后处理视频,得到各个通电时间下的最大变化角度,并作对比,如图11所示。

图11 不同电压及通电时间下的角度变化趋势
当初始电压小于2 V时,SMA丝不发生响应,不会产生收缩现象,仿生捕蝇草叶片呈几乎不动状态。用 12 V作为加热电压,各个通电时间下,SMA丝温度升高较快,且温度较高,SMA丝均被烧断。由于存在误差,实验数据所绘制的曲线大致规律相同,虽然并不完全一致,但是不规律数据的波动较小,证明实验结果可靠。
捕蝇草的最大弯曲角度随着通电时间的增加而先增加后减小,最大弯曲角度的峰值普遍出现在通电时间为100 ms时。从图11中可以看出,通电电压对捕蝇草最大弯曲角度的影响较大,通电电压越大。捕蝇草的最大弯曲角度普遍越大。这根据整体规律,可以看出,4 V时实验误差较大,这是因为捕蝇草的动作不同步、不均匀。为了保证仿生捕蝇草叶片的捕捉过程快速、同步且弯曲角度较大,选择电压为8 V,通电时间为100 ms。
通电电流的大小直接影响SMA丝的升温速度,进而影响SMA丝的响应时间。为了确定SMA的驱动电流,获得 SMA 丝在不同电流下所能达到的最大弯曲角度,如图12所示,得到不同电流强度下仿生捕蝇草叶片的弯曲过程中角度变化。

图12 通电电流与角度变化关系图
由图12可知,捕蝇草的最大弯曲角度随着通电电流的增加而增大,当通电电流达到4 A时,仿生捕蝇草内的SMA丝有变红现象,说明SMA丝的受热温度较高,无法持续反复进行加热,会影响形SMA丝的性质,从而影响仿生捕蝇草的弯曲性能。
电流越大,响应时间越短。然而电流过大,控制不当,容易造成通电温度过高,SMA 高温失效;电流过低,一方面响应时间长,另一方面可能会达不到 SMA 的相变结束温度,使驱动过程不能完成。因此研究不同电流下SMA 丝的驱动特性,给予驱动器合理的通电电流,对提高驱动器响应速度和防止SMA 过热失效具有重要的意义。本文选择通电电流为3 A。
综上所述,确定仿生捕蝇草叶片最佳的控制参数为8 V,3 A,100 ms。在此控制参数下仿生捕蝇草叶片的弯曲过程如图13所示,捕蝇草弯曲角度近30°,且响应时间短,能够在一定时间内恢复到初始状态。在一定时间间隔内重复弯曲变形动作,变形无明显衰减,满足初始设计目标与设计初衷。
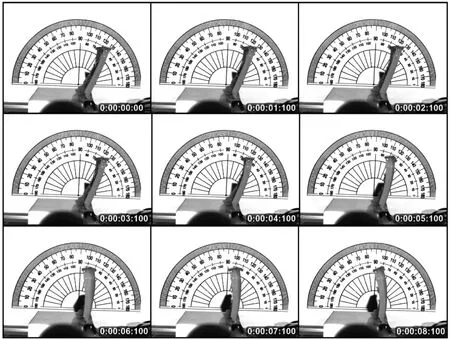
图13 8 V,3 A,100 ms控制参数下叶片弯曲变形图
2.3 仿生捕蝇草的功能实验研究
根据上述实验,确定实验的控制参数为通电电压8 V、通电电流3 A、通电时间100 ms,根据上述参数,进行仿生捕蝇草叶片的功能实验。使用8 V、3 A的直流电源对SMA丝通电,使仿生捕蝇草叶片向内弯曲闭合。由图14可知,仿生捕蝇草叶片在一个周期内的运动过程可分为以下三步:

图14 双叶片运动变化对比图
(1)未通电时,仿生捕蝇草叶片处于自然弯曲状态,根据上述实验,弯曲角度29°,故将叶片弯曲起始点置于量角器67°、125° 处,也就是说捕蝇草的初始张开角度为58°。
(2)对 SMA 丝施加 8 V、3 A的电压、电流,当通电时间为 100 ms时,叶片内SMA丝整体收缩,促使仿生捕蝇草叶片弯曲闭合进行捕捉。
(3)断电状态时,SMA 丝变形恢复,仿生捕蝇草叶片恢复初始状态。
将制作的仿生捕蝇草叶片的运动形态与高速摄象机记录下的捕蝇草变化进行对比,如图14所示。经过对比发现,仿生捕蝇草叶片运动与实际捕蝇草运动基本一致,能够满足捕捉目标。初始状态下,捕蝇草张开时叶片呈现外凸状态,进行捕捉后,叶片会由外凸转换为内凹,从而达到密封状态。仿生捕蝇草叶片并未达到对叶片状态转变的仿生。在运动阶段下,捕蝇草叶片运动迅速,仿生叶片能够在1 s内实现叶片的闭合,达到了与捕蝇草相当的水平。在闭合状态下,捕蝇草能够在多个维度上实现屈曲变形,捕捉过程结束后,捕蝇草叶片完全闭合,不留一点缝隙。而仿生捕蝇草叶片由于制作误差及结构因素,只能够发生单维度的屈曲变形,导致闭合后存在缝隙,无法紧密闭合,需进行后续的优化设计。
3 结 语
本文设计制作了一款基于SMA丝驱动的仿生捕蝇草,可以在常温状态下实现捕捉功能。仿生捕蝇草整体质量轻,结构简单,最大张开角度达到58°,能够在1 s内完成叶片的闭合动作。仿生捕蝇草叶片本体材料为硅胶,叶片具有一定的柔性,且在对目标物进行捕捉时具有一定的适应性,具有较好的包裹性。
性能测试及功能性实验都表明,仿生捕蝇草能够满足初始设计目标和设计初衷,响应迅速,对工作环境要求较低且无污染,可重复利用,具有一定的经济价值。根据实验测得的数据和实验过程中出现问题的分析总结,可以对仿生捕蝇草叶片结构进行进一步优化设计,辅之一诱捕装置,能够更好地达到捕蝇草的全流程仿生目标,使其能够全流程完成捕捉任务,从而更好地实现病虫害防治和虫情监控。
