货运火车车厢余煤清扫机器人吸风量智能调控方法研究
2021-11-16孙建福王正强
孙建福,王正强,李 宁
(上海梅山钢铁股份有限公司,江苏 南京 210039)
煤炭、金属矿石等原料大多通过货运火车实现跨区域长距离调度,国内很多钢铁企业、选煤厂、化石能源原料港口普遍采用自动化翻车设备,将火车车厢内原料卸至指定料仓。然而,货运火车在逐节翻车卸料后,车厢内仍会留存有部分颗粒状或粉状余料。为了提高原料利用率,避免空车厢中余料引起扬尘,近年来开始使用“扫吸一体化”货运火车车厢余料清扫机器人,实现余料的高效、环保、智能清理与回收。负压吸附系统是余料清扫机器人中的关键组成部分,负压风机在吸料口产生一定负压值的风量,将机器人扫起的余料通过气力输送至料仓。为了实现余料清扫机器人高效作业,理想的负压吸附系统应在保证余料清理清洁度的前提下尽可能低功耗智能化运行,根据车厢内余料分布体积量的多少自适应调节系统吸风量。
传统的吸风量调整方法大多采用PID、模糊算法、灰色理论等方法,实际工况中物料的分布情况具有较强的随机性和非线性,上述方法难以根据设备历史运行情况预测下一时刻的物料情况。近年来,人工神经网络在智能预测与自动控制等领域取得了一系列成果[1-2],其中概率神经网络对于工程中的有监督、小样本量的工况,表现出良好的稳定性和准确性[3-4]。然而,概率神经网络在训练过程中需要设定平滑因子,平滑因子的合理选择对神经网络的训练效果和收敛精度有直接的影响,传统的试凑法或经验法取值耗时长且不易找到最优的平滑因子。
以项目组研制的HCQS-75/110型货运火车车厢余煤清扫机器人为研究对象,以机器人中负压吸附系统的风机驱动电流为信号源,利用果蝇优化算法获取概率神经网络中的平滑因子,建立基于改进概率神经网络的余煤分布情况预测模型。在此基础上对负压吸附系统吸风量进行分档调节,以提升系统智能化水平。
1 余煤清扫机器人吸风量调控模型建立
1.1 概率神经网络
概率神经网络是人工神经网络的一个重要分支,作为一种前馈型神经网络算法,概率神经网络的训练过程类似于有监督的反向传播,其每一次训练的输入模式都被作为一个新的隐藏单元的连接权重[5]。概率神经网络训练过程快,对样本的需求量小,目前被广泛运用于预测、分类、模式识别等领域[6-8]。
概率神经网络为4层神经网络结构,包含输入层、模式层、求和层、输出层,如图1所示。

图1 概率神经网络结构示意图
输入层直接接收外部数据,其神经元节点数量是由输入样本数据的维数决定。模式层为径向基层,接收输入层的数据并根据数据特征计算其中心,模式层的神经元数量根据数据聚类中心数量决定。模式层中第i个神经元与第j个神经元的关系Φij计算公式如下:
(1)
式中:Φij(x)为第i个神经元与第j个神经元的关系函数,i=1,2,…,M,其中M为样本数量;σ为平滑因子;d为样本维数;T为常数;xij为第x个样本的第j个中心。
求和层的计算值是模式层中同类神经元的加权平均值,其计算公式如下:
(2)
式中:νk为第k种神经元的输出;Φks为第s个神经元与第k种神经元的权重之和;L为第i种神经元的数量。
选择最大概率者作为结果神经元,并将其传输至输出层,输出层的结果可表示为:
β=arg max(νk)
(3)
式中:arg max(νk)为概率选择函数;输入层向量与输出层向量可分别表示为X和β。
在概率神经网络中,各个神经元的连接权重通过训练的方法不断更新,平滑因子σ往往根据经验确定,其取值过大或者过小都会导致训练时间的增长,以及训练精度的降低,因此在确定概率神经网络的架构后,获取最优的平滑因子至关重要[7,9-10]。
1.2 果蝇优化算法
果蝇优化算法由潘文超教授提出[11-12],由于其结构简单且收敛速度快,因此被广泛应用于工程参数优化和多目标寻优领域[13-17]。果蝇算法优化过程如下:
1)优化过程初始化。设置迭代次数为N,种群中果蝇数量为P,初始种群位置为(X_axis,Y_axis),随机飞行距离为L。每个果蝇的初始位置根据嗅觉确定,并通过随机函数获取其飞行方向及与其他果蝇的距离:
(4)
式中:p=1,2,…,P;(Xp,Yp)为第p个果蝇的坐标;ran(-L,L)为取值范围[-L,L]的随机函数。
比较本次迭代获取的潜在解与之前的最优解sbest,若优于之前迭代得到的最优解,则将其替代,同时更新中群位置:
(5)
3)迭代优化。若味道浓度达到事先设定的阈值精度,或迭代次数达到最大迭代次数,则结束本次优化,否则重复上述过程[18-20]。
果蝇种群觅食过程如图2所示。
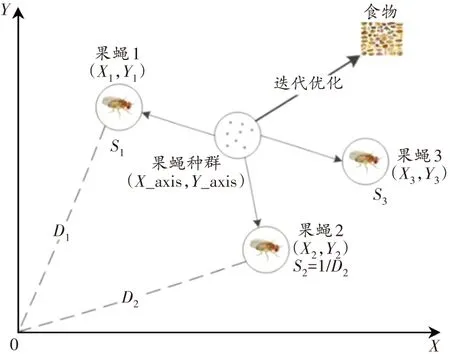
图2 果蝇种群觅食过程
1.3 余煤清扫机器人吸风量调控策略
1)利用概率神经网络与果蝇优化算法对风机驱动电流进行预测,步骤如下:
①初始设置迭代次数N,种群中果蝇数量P,初始种群位置(X_axis,Y_axis),随机飞行距离L,概率神经网络训练样本和训练次数。
②根据公式(4)计算每个果蝇个体的位置,并计算距离和味道浓度判断系数,将P个味道浓度判断系数作为最佳的平滑因子σ的潜在解群,分别构建概率神经网络模型并根据样本和训练次数进行训练。以训练过程中神经网络输出值与实际值的误差构建适应度函数:
(6)
(7)
式中:βm,d和βm,a分别为第m个数据样本的训练输出值与实际值;t为计算中间值;f为适应度值。
根据适应度值计算每个果蝇个体的味道浓度,从中选出最大的味道浓度并与当前最优值进行比较,判断是否需要按照公式(5)更新种群位置。
③当迭代次数达到N时,停止迭代,否则重复上述过程。当迭代结束后最优个体对应的味道浓度判断系数便为最佳σ取值。
2)根据预测的风机驱动电流,调控负压吸附系统吸风量。
首先采用实验数据拟合的方法,建立风机驱动电流I与余煤体积量S之间的表达式,同时建立起吸风量Q与风机变频器输出变频值f之间的关系。余煤清扫机器人中负压吸附系统属于大功率重载设备,为了提高关键设备使用寿命,降低故障率,电动机与风机转速不宜过于频繁调整。本文在大量实验室数据和工程经验的基础上建立了f与I之间的专家规则库,实现风量模糊化分档调节。
2 实验验证
为了验证基于概率神经网络与果蝇优化算法的风机电流预测模型,以及吸风量模糊化分档调控方法的有效性与可行性,在中国宝武集团上海梅山钢铁股份有限公司煤炭卸车线设计并制造了HCQS-75/110型火车车厢余煤清扫机器人。该机器人主要包括多自由度机械臂、负压吸附系统、水平移动与搭载平台等,如图3所示。

1—清扫机械臂;2—管道;3—变频电动机;4—风机;5—料仓;6—转运胶带;7—水平移动与搭载平台。
负压吸附系统是将颗粒状或粉末状煤炭通过负压气力输送的关键组成部分,主要由变频电动机、变频器、风机、管路、阀及相关辅件等组成。由于车厢在卸料后箱壁仍会有部分残余煤炭,且余煤分布不均,清扫机器人在清扫过程中风机电流也会随余煤体积变化而变化。实验中采集的部分风机电流如表1 所示。

表1 风机电流数据
将表1中1 000个数据分为200组,训练过程中每组5个数据的前4个为输入,最后1个为输出。利用果蝇优化算法获取概率神经网络中的平滑因子,优化过程参数设置如下:迭代次数N=1 000,种群规模P=10,初始种群位置用ran(0,1)函数随机获取,随机飞行距离L=1,以公式(6)、(7)作为适应度函数,果蝇优化算法的迭代过程如图4所示。

图4 果蝇优化算法迭代过程
根据最佳适应度值对应的果蝇位置,最终确定平滑因子σ=0.216,将此数值用于构建最终的概率神经网络,并取现场实际值与预测值进行对比,对比结果如图5所示。

图5 风机电流实际值和预测值曲线
在图5中风机实时电流为Ia,预测电流为Ip,负载预测精度δI的评价公式如下:
(8)
在基于改进概率神经网络的风机电流预测模型中,预测精度可达97.4%,能够较好反映出车厢内余煤分布体积量的情况,满足余煤清扫机器人吸风量自适应控制对于余煤预测精度要求。在此基础上,建立了吸风量模糊化分档调节知识库,用于实时调节负压吸附系统吸风量,如表2所示。

表2 吸风量模糊化分档调节知识库
现场使用情况表明,本系统可以较好地满足不同余煤分布情况的车厢自适应余料清扫,车厢一次清扫合格率达到98.2%,相较于始终处于最大吸风量工作,可节省能耗26.5%。
3 结语
针对HCQS-75/110型火车车厢余煤清扫机器人吸风量智能调控问题,利用果蝇优化算法对概率神经网络的平滑因子进行参数优化,建立了基于改进概率神经网络的风机电流在线预测模型,实验表明电流预测模型精度可达97.4%;构建了风机电流—余煤体积量—吸风量—风机变频器给定值之间的专家知识库,并建立了吸风量模糊化分档调节规则库。现场使用表明,车厢一次清扫合格率达到98.2%,节省能耗26.5%,可以满足余煤清扫机器人的智能化与高效作业要求。
