遥感影像不同校正模型对反射率的影响分析
2021-11-14闫长位贾智乐
闫长位,贾智乐,许 强
(1.河南省沙颍河流域管理局,河南 漯河 462000;2.河南省水利勘测有限公司,河南 郑州 450003)
近些年来,多光谱、高光谱的轻小型传感器的研发,使得无人机遥感数据获取的局限性获得突破。本文利用飞马D200四旋翼无人机携带有两轴增稳云台的D-MSPC100五波段(蓝、绿、红、红边、近红外)多光谱相机,根据在郑州郊区开展的无人机遥感综合实验数据,采用严格成像模型和多项式模型对影像进行了几何校正,经过辐射定标、大气校正反演得到地表反射率,利用地面实测控制点检核了各模型几何校正的精度,用地面实测的反射率对反演结果进行验证,并对比了2种模型反射率结果之间的差异。验证结果为基于无人机开展地表参量的定量反演研究提供 借鉴[1-3]。
1 几何与辐射校正模型
为了尽可能有效准确地提取图像信息,需要对遥感图像的几何变形进行校正。几何校正中的一个关键点是地理参考的过程,即将图像与地图坐标进行对准。因此要有效地使用遥感影像,首先要建立有效的成像模型,以正确的描述物方空间坐标与图像平面像点坐标之间的几何关系。Okamoto和Vincent等将遥感影像的传感器模型分为两大类,物理模型和通用模型[5-6]。本文的研究中主要探讨了严格成像模型和多项式校正模型对反射率反演的影响。
开展定量遥感研究的首要前提是辐射定标和大气校正,辐射定标主要是指将传感器观测到的数值转化成物理量的过程[7]。从遥感图像获得地表反射率的过程通常叫做光学遥感的大气纠正,其目的是去除大气效应的影响,准确提取地表信息[8]。为了准确快速的进行大气纠正,目前的大部分方法是根据辐射传输模型,计算得到TOA值,建立查找表。6S辐射传输模型对不同传感器和不同地面状况下,太阳光在地面目标传感器整个传输路径中所受的大气影响进行了描述,通过输入相应的参数,即可求得地面反射率。本文研究中采用6S辐射传输模型进行大气校正,对于无人机遥感的大气校正,由于飞行高度通常在1km以下,可根据气溶胶的消光系数廓线确定飞行高度层以下气溶胶的光学厚度。
2 实验区概况
实验区位于郑州市郊区,场地地势开阔平坦,无遮挡,倾斜度小于5度。场地地表覆盖类型多样,包括植被、水体、道路和建筑等地类。使用的无人机是飞马D200四旋翼无人机,它具有操作简单,飞行速度稳定,转弯半径小,飞行高度稳定,飞机姿态稳定等独特优势。此次飞行搭载带有两轴增稳云台的D-MSPC100五波段(蓝、绿、红、红边、近红外)多光谱相机(如图1所示)此次实验为综合性无人机遥感实验,同步开展了地面控制点测量、地表反射率测量、地基CE318测量等。其地面同步地物光谱测量采用美国 ASD 公司的Field Spec FR 便携式野外地物光谱仪和标准漫反射参考板。为保证实测数据能够反映测区地物的反射特性,在整个测区针对各典型地物,采用多点测量统计平均的方法获取反射率值。根据需要,选取植被、水体、裸土3种典型下垫面类型数据进行处理,结果如图2所示。

图1 D-MSPC100相机
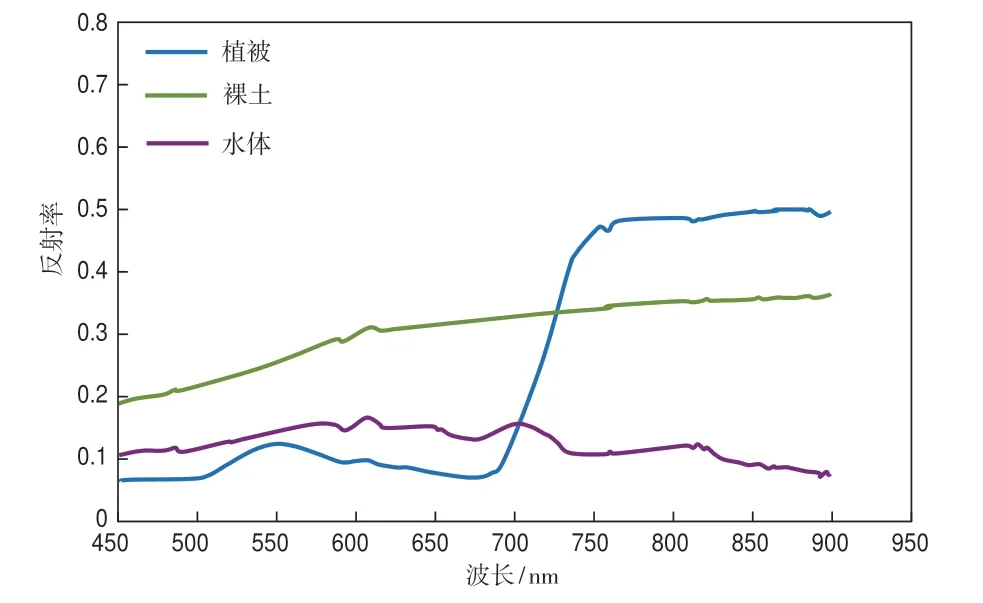
图2 实测反射率
3 结果与分析
选取第六航带上5个波段中的蓝、绿、红、近红外4个波段图像为例,采用基于POS提供的外方位元素构建共线方程式模型和采用地面控制点构建三次多项式模型进行图像的几何纠正,采用最近邻插值、双线性插值和三次卷积进行了重采样,对比了3种采样方式对结果的影响。选取以双线性插值为采样方式的两个模型校正结果,以地面实测控制点为检查点,验证几何纠正的精度。然后对几何纠正结果进行辐射校正,反演地表反射率,利用实测地表反射率进行验证,得到其相对差异,如图3~5所示。

图3 原始影像
3.1 几何校正结果
采用反解法微分纠正对图像进行校正,分别采用了最近邻法、双线性法、三次卷积法进行重采样,对各方法的插值结果进行对比。张周威[9]等对最近邻插值、双线性插值和三次卷积等3种重采样方法对重采样后的遥感影像质量进行了分析和评价,最近邻与双线性之间的相对差异为2% ,双线性与三次卷积的相对差异为0.2%,最近邻与三次卷积的相对差异为2.3%。虽然不同的影像、不同的地形会对重采样的结果产生不同的影响,但考虑到双线性差值的相对精度较高,因此,下文的纠正精度与反演结果对比分析以双线性插值结果为例。
从表1可以看出,三次多项式纠正模型精度高于共线方程,三次多项式的纠正精度均方根误差满足 3个像元,而共线方程式的误差近10个像元。产生该问题的原因主要是由于无人机机载POS数据的精度不高,由外方位元素引入的误差较大,而且测区内地势平坦,适用于多项式模型,采用3次多项式使得残差最小,因此可以产生较好的校正效果。但要注意的是,多项式校正时,需要选取大量的控制点,数据处理时间上高于共线方程式。且当地形起伏变化较大时,多项式模型校正对局部地形处理效果不佳。
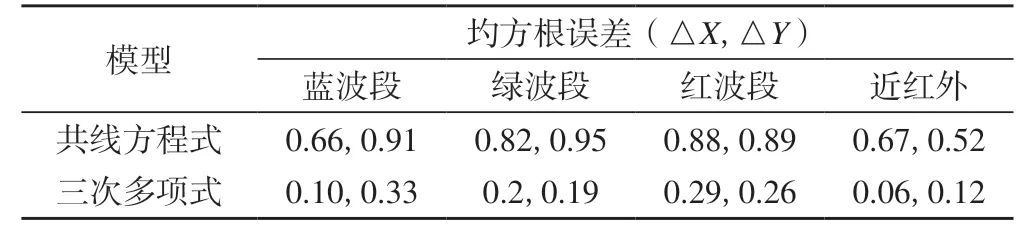
表1 几何校正精度
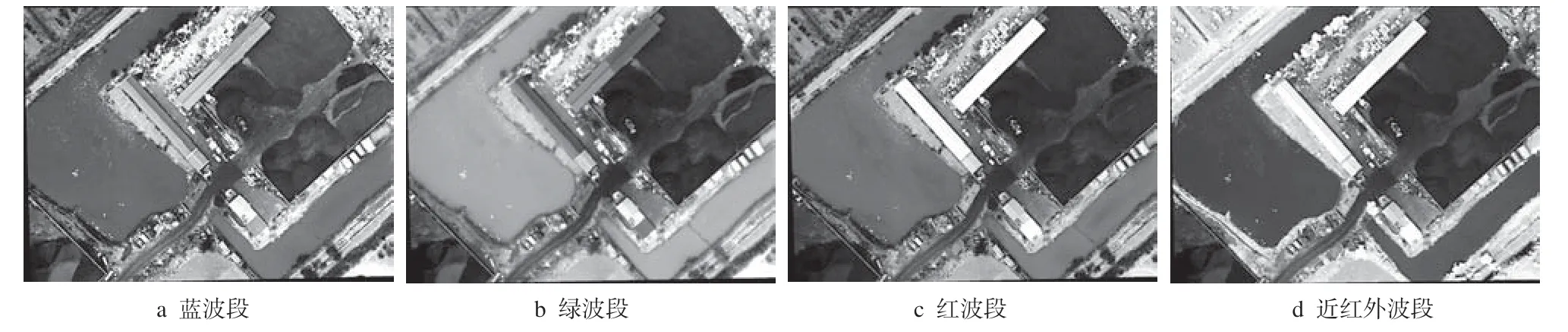
图4 共线方程式校正结果

图5 三次多项式校正结果
3.2 反射率结果
分别在2种几何校正的结果上进行辐射校正,得到地表反射率图像。在反射率图像内选取多处典型地物(水体、植被、裸土)作为样本数据,统计其反射率平均值。图6为实测和基于2种几何校正模型得到的地表反射率,横坐标轴的1、2、3、4分别代表蓝波段、绿波段、红波段和近红外波段。从结果来看,经大气校正后得到的地表反射率与实测反射率结果一致。经统计分析,水体的多项式模型反演结果与实测反射率平均差异为3.3%,共线方程模型反演结果与实测反射率平均差异为3.3%,两模型之间差异为0;植被的多项式模型反演结果与实测反射率平均差异为1.9%,共线方程模型反演结果与实测反射率平均差异为2.2%,两模型之间差异为0.2%;裸土的多项式模型反演结果与实测反射率平均差异为3.8%,共线方程模型反演结果与实测反射率平均差异为3.9%,两模型之间差异为0.1%。

图6 地表反射率
4 结 语
本文针对无人机的遥感数据进行了几何与辐射校正处理,分析对比了2种几何校正模型及其对地表反射率的影响。
1)无人机的影像处理可以采用不同的几何校正模型进行校正,严格成像模型受机载POS提供的位置姿态数据影响,每幅影像有对应的POS数据,校正速度快,能以POS数据为初值,通过多次迭代的方式提高校正的精度。多项式受地形以及控制点数量及分布的影响,每幅影像需要通过配准提取控制点,数据准备时间较长,且控制点数量较少或分布不均时对校正结果影响很大。因此,在应用中可根据实际条件选择数据几何处理的方法。
2)经过大气校正后得到的地表反射率,用实测反射率进行了验证,证明了用无人机开展定量遥感研究的可行性,同时从反演结果可以看出,低空无人机遥感受大气影响较小,得到的反射率结果与地面实测结果一致性更好,充分体现了无人机可云下作业、高分辨率的特点。
3)通过对比分析无人机高分辨率影像2种校正模型的反射率反演结果,验证了不同几何校正模型的选取对天底观测下反射率的反演结果的影响,整体来看,主要与其定位精度有关,对反射率的影响较小,可以忽略。