基于夜光遥感数据的居民收入时空变化 与驱动力分析
2021-11-14毛嘉巍孙晓莉
毛嘉巍,孙晓莉
(1.昆明市环境保护联合会,云南 昆明 650000 ;2.云南国土资源职业学院国土空间信息学院,云南 昆明 652501)
夜光遥感影像具有覆盖范围广、时间序列长、大部分数据可以免费获取等优点,为当今社会经济和人类活动等提供了研究资料[1-2]。目前常用的夜间灯光遥感数据是DMSP遥感数据和NPP遥感数据[3]。第4版DMSP卫星影像主要由6颗不同型号的卫星获取,其时间跨度为1992-2013年,NPP卫星获取影像时间跨度从2012至今。以昆明市为例,基于DMSP和NPP夜光遥感数据对2000-2017年居民收入时空变化进行分析,并选取产业生产总值[4-5]、人口[6]、灯光总量三大影响因子,对影响居民收入的驱动力进行分析。
1 研究区概况
昆明市位于中国西南边陲、云贵高原中部,东与曲靖市接壤,西与楚雄州相连,南与玉溪市、红河州毗邻,北临四川省。昆明市辖7区1市6县,市中心位于102°42′E、25°02′W,市域面积21 012km2。近年来,昆明市稳步推进经济结构的战略性调整,积极探索实施对外开放战略,经济发展迅速,GDP由2000年626.29亿元增加到2017年4 857.64亿元,昆明市年末常住人口由2000年的480.90万人增加到678.30万人。
2 数据来源与处理
2.1 数据来源
数据主要包括夜光遥感影像、行政区划、居民收入、人口统计、GDP统计等数据。其中夜光遥感数据2000-2012年来源于DMSP-OLS数据、2013-2017年NPP-VIIRS数据来源于中科院版地球夜光数据集(代号“火石”)(以下简称NPP-VIIRS数据);行政区划数据来源于中国资源环境数据云平台;居民收入、人口统计、GDP统计数据来源于昆明市统计年鉴。
2.2 数据处理
由于第4版DMSP-OLS稳定灯光影像F14 2000、F14 2001、F14 2003和F15 2000、F15 2001、F15 2002、F15 2003是由不同的卫星(F14、F15)获得的同一年份的夜间稳定灯光遥感数据,DMSP不同卫星之间OLS传感器有一定的区别,导致了不同卫星同一时期之间的稳定灯光影像的总亮度值不同,且同一时期不同卫星的2张稳定灯光影像在同一位置影像元所对应DN值不一样。为了最大程度提高DMSP-OLS稳定灯光影像数据可靠程度和解决同一年份影像的不连续性,需要对同一卫星不同年份的两期DMSP-OLS夜间稳定灯光遥感影像进行相应的数据处理。
2.2.1 DMSP-OLS数据年际校正
使用ArcGIS中栅格计算器,对经过重采样、投影、裁剪的F14卫星、F15卫星、F16卫星DMSPOLS稳定灯光影像中2000年到2009年相同卫星的同一年份的影像进行年际校正,得到校正后的第4版2000-2012年DMSP-OLS稳定灯光影像。
经过年际校正前的第4版DMSP-OLS稳定灯光影像中不同卫星获取的影像在2000-2012年时间序列中是相互隔断的,相同卫星在相邻年份之间获取的影像总亮度值波动较大,不同卫星获取的影像在同一时期的总亮度值是不相同的。从图1可以看出,经过年际校正后的DMSP-OLS稳定灯光影像能够最大程度保留同一时期由不同卫星获取影像的DN值特性,并且增强了2000-2012年稳定灯光影像在时间序列上的连续性和同一性。

图1 年际校正后2000-2012年DMSP-OLS稳定灯光影像 总亮度值
2.2.2 DMSP-OLS过饱和校正
由于第4版DMSP-OLS稳定灯光影像普遍存在像元DN值峰值为63,且像元DN值过饱和的现象,因此需要进行相互校正[7]。2000-2012年第4版的DMSP-OLS遥感影像数据缺乏进行辐射定标的必要参数,且算法复杂。灯光影像像元DN值过饱和现象导致了研究区域的亮度值与真实亮度值存在偏差,从而导致使用影像像元亮度值进行相关研究中,存在数据误差较大, 严重影响研究数据的准确性,因此需要对稳定灯光影像进行过饱和校正。
文中选择F16 20100111-20101209经过辐射定标的昆明市影像作为校正参考对象,然后基于ArcGIS软件将第4版2000-2012年DMSP-OLS稳定灯光影像与F16 20100111-20101209辐射定标影像转换为点文件,在ArcGIS 中每个像元中心都会产生一个点,转换后ArcGIS 会自动提取该点所对应像元的DN值。使用ArcGIS 的提取工具对第4版年际校正后2000-2012年的稳定灯光影像进行提取,得到该区域数据的DN值。然后使用SPSS软件设F16 20100111-20101209稳定灯光影像的像元DN值为因变量(y),第4版稳定灯光数据DN值为(x),建立数据散点图。建立4种回归模型,该模型为一次回归模型、二次回归模型,对数回归模型,幂回归模型。计算数据拟合优度(R2)后,根据拟合优度(R2)的变化趋势选择最合适的函数进行去饱和校正。经过回归分析后得到线性、对数、二次、幂回归模型的平均拟合优度(R2)分别为0.725、0.458、0.801、0.779。按照平均拟合优度回归模型排序得出:二次函数>幂函数>线性函数>对数函数,应选择二次回归模型作为回归校正的函数。由于文中使用的数据为2000-2017年夜光遥感数据,需要完成DMSPOLS稳定灯光影像和NPP-VIIRS一致性的校正,作为校正对象的DMSP-OLS2012年稳定灯光影像就显得非常重要。从2000-2017年不同模型拟合优度来看,2007年以前二次回归模型的拟合优度大于幂回归模型,2008年之后幂回归模型的拟合优度均高于二次回归模型,因此最终选取幂回归模型来对文中DMSP-OLS数据进行影像去饱和处理。经过SPSS回归分析后得到幂回归模型的常数和校正公式(1):

式中,DN为校正后的影像像元DN值;A为常数; X为校正前的影像,b为幂,i为第i期的影像。
2.2.3 DMSP-OLS不连续校正
在2000-2012年之间相邻年份灯光影像存在总亮度值增长异常的情况,与昆明市经济发展趋势相悖,因此需要对影像中异常变化的像元DN值进行校正,使得相邻时期之间的影像具有可比性,为提高昆明市灯光影像与经济发展规律的契合程度,需要进一步对灯光影像进行连续性校正。
相邻时期的DMSP-OLS稳定灯光影像对应的像元DN值有:①前年稳定灯光影像像元DN值减后,年稳定灯光影像像元DN值为0时,令后年影像像元DN值不变;②前年稳定灯光影像像元DN值减后,年稳定灯光影像像元DN值小于0时,令后年影像像元DN值不变;③前年稳定灯光影像像元DN值减后,年稳定灯光影像像元DN值大于0时,令后年影像像元DN值与前年的像像元DN值相同。利用ArcGIS得到DMSP-OLS稳定灯光影像不连续校正公式(2)所示,并对校正后的数据进行检验,确保数据的可 用性。

式中,DNi为后年影像像元的DN值;DNi-1是前年影像像元的DN值。
2.2.4 影像一致性校正
由于NPP-VIIRS影像与DMSP-OLS影像所采用传感器有很大区别,因此并不能直接使用,为增强二者在时间上的一致性,需要对其进行一致性校正。具体方法为使用校正好的2012年稳定灯光数据为因变量,“NPP-VIIRS”灯光影像集为自变量。提取经过连续校正的2013年DMSP-OLS稳定灯光影像中,DN值大于0的像元为不变区域。利用ArcGIS的提取工具分别提取2013-2017年的不变区域,使用SPSS分别对一次回归模型、二次回归模型、幂回归模型、对数回归模型进行回归分析,并根据拟合优度找出最合适的回归模型为校正模型。二次回归模型、线性回归模型、幂函数回归模型、对数回归模型的拟合优度分别为0.751 6、0.709 8、0.628和0.576。由于拟合优度取值范围没有一个明确的规定,建立回归模型的目的是对因变量的预测,为保证预测的精度,一般采用拟合优度值高的模型,昆明市地区影像数据建立的散点图中,数据点 均匀分布在二次函数两侧,4种回归模型在x轴为 50时,拟合差异较小;在x轴50后幂函数,对数函数,线性拟合差异开始随x轴变大而变大,残差也逐渐增大,而二次函数的拟合差异变化相对较小。因此,文中选择二次回归模型作为灯光影像校正的回归模型,并根据校正检验公式最终得出一致性检验后的影像总亮度值,如图2所示。

图2 2000-2017年一致性校正后影像总亮度值
2.2.5 夜光遥感影像的阈值分割
由于DMSP-OLS夜光影像的灯光范围要大于人类活动的范围,NPP-VIIRS夜光影像存在偶然噪点,需要通过确定一个阈值来对DMSP-OLS影像与NPPVIIRS影像进行阈值分割,从而提高影像总亮度值与居民收入的拟合精度。影像阈值范围为(0~255),共有256个阈值,确定阈值后可以将影像分割开来。阈值以下或等于阈值的像元为干扰像元,本文将该像元赋予DN为0,且认为该像元没有人类活动轨迹,阈值以上的像元认为该像元为真实像元。文中选用最大熵来确定阈值,当熵最大时,影像前景与背景之间的不确定性最大,该值就是影像最合适阈值。文中对2000-2017年的影像提取像元DN值进行最大熵计算,如公式3所示。

式中, MAX(H)为最大熵;HF为背景熵;HQ为前景熵。
通过计算得到2000-2017年阈值分割后的影像总亮度值,如图3所示。
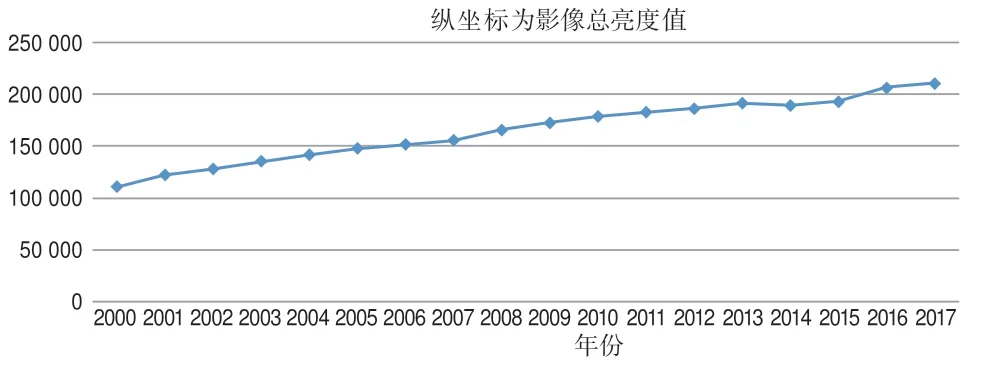
图3 2000-2017年阈值分割后影像总亮度值
3 结果与分析
3.1 居民收入时空变化分析
昆明市城市居民人均可支配收入、农村居民人均纯收入2000-2017年间分别由7563元增加到 39788元、2220元增加到13698元,17 a内增速分别为426%和517%。从统计年鉴等数据分析中可将2000-2017年昆明市居民收入分为3个发展阶段,其中2000-2003年为平稳增长阶段,该阶段城市居民人均可支配收入的增长率均不超过10%;2003-2011年为快速发展时期,该阶段增长率最高为19%,最低为6%;2012-2017年可支配收入增长开始逐渐降低,之后逐渐趋于稳定。可将2000-2017年农村居民人均纯收入分为3个发展阶段,其中2000-2003年为缓慢增长阶段,增长率不超过5%;2004-2011年为快速增长阶段,增长率最高为20%、最低为8%;2011年后收入增长率开始逐渐降低,而后逐步趋于稳定,如图4所示。
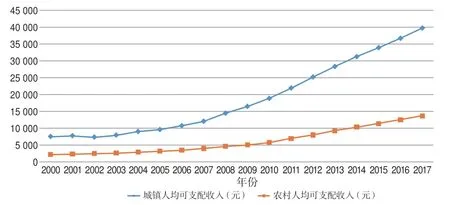
图4 2000-2017年昆明市居民收入图
利用统计数据可以从时间上对昆明市2000-2017年收入进行直观准确的研究和分析,但由于缺失昆明市各县(市、区)部分年份的收入和人口数据,进行昆明市各县(市、区)居民收入在不同年份的时空变化就显得较为困难。本文利用居民收入数据和夜光遥感数据呈线性相关的特性,对昆明市收入数据和像元DN值拟合,得到的影像亮度值实际代表的是DN收入。从而经过拟合得到2000-2017年昆明市各县(市、区)收入数据的空间分布图,并对进行拟合后的2000-2017年昆明市各县(市、区)居民收入空间分布图进行分析。利用ArcGIS中图像分类的自然间断点分级法把昆明市2017年拟合影像的收入像元分为4个级别,分别为低收入像元、中收入像元、中高收入像元、高收入像元,如表1所示。

表1 收入分段表
由于传统的收入数据分析需要基于各县(市、区)行政单元进行分析,但在收集所有年份数据时存在一定的困难,该拟合方法可以将研究单元细化到各县(市、区),并绘制昆明市居民收入分布图,从而进行各县(市、区)居民收入时空变化分析,如图5~8所示。
在2006-2011年期间,昆明市居民收入由479.515提升至1094.412亿,收入增长约128%。从图5~8中可以看出,与2000年相比,2006年昆明市内出现中低收入区域主要为昆明市主城区和安宁市;从2011年昆明市居民收入拟合图看出,昆明市主城区出现中高收入地区,该区域由之前的2006年收入拟合图的中收入区域发展而来,且中、中高收入区域呈现向周围扩散现象。其中主要得益于昆明市城市规划发展,呈贡大学城由2005年开工建设到2011年大体建设完成,该区域经济、人口相比之前有较大程度的发展。从2011收入拟合图中看出呈贡区出现中高收入地区。相比2006年昆明市东川、寻甸、禄劝县在原来中收入区域逐渐扩增出中高收入地区,并且中收入地区也有一定程度的扩增,该区域低收入地区向东北方向增加。富民、嵩明、宜良、石林县也出现了中高收入区域,其中低收入区域在原有基础范围上有所扩增。安宁市中高收入区域范围增加仅次于主城区,该区域也出现了较明显的收入区域分层现象。
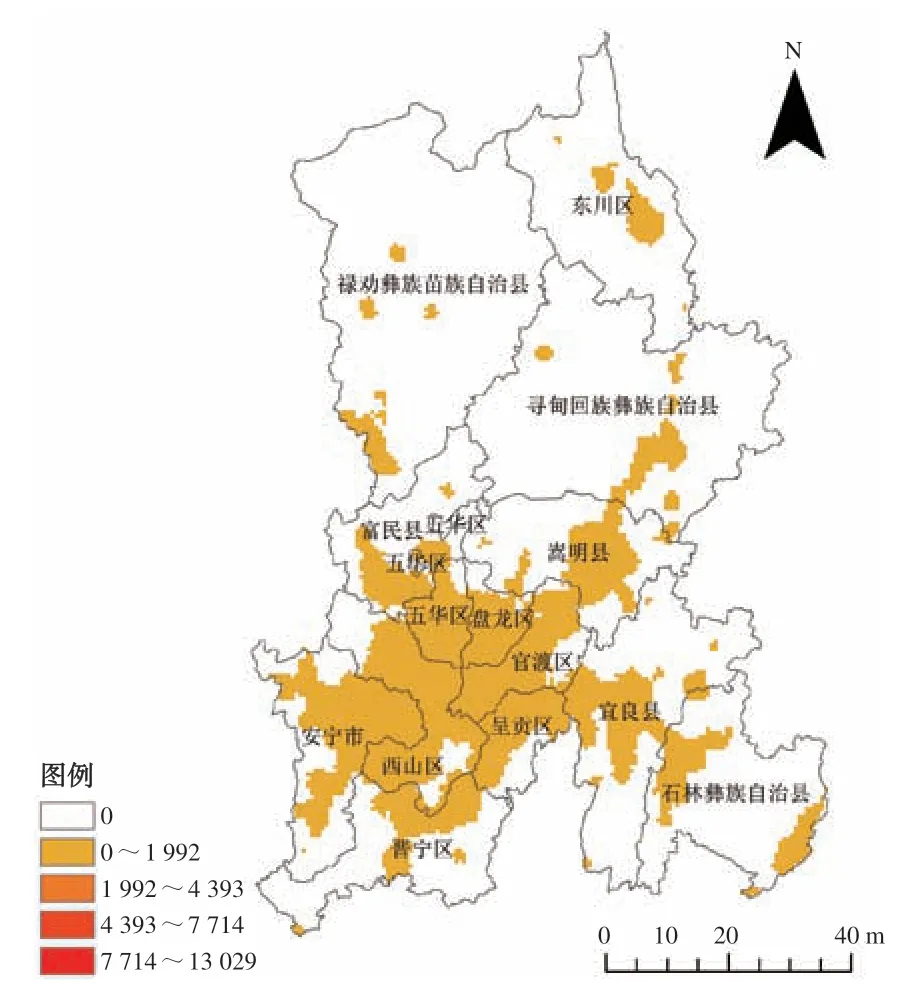
图5 2000年居民收入拟合图

图6 2006年居民收入拟合图
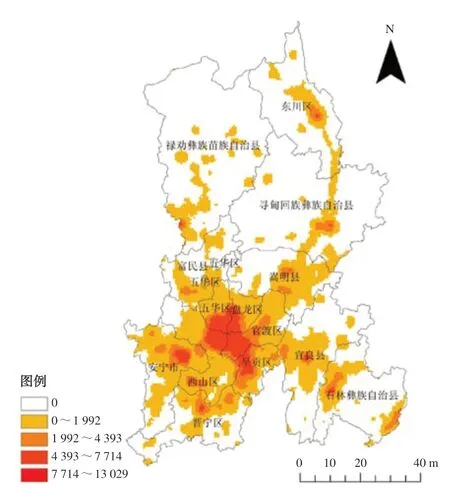
图7 2011年居民收入拟合图

图8 2017年居民收入拟合图
3.2 居民收入驱动力分析
文中主要选取三大产业GDP数据、人口数据、影像总亮度值等作为居民收入的驱动因子,借助SPSS软件对所选取的影响因子进行驱动力分析。
3.2.1 三大产业GDP驱动力
借助SPSS软件对昆明市第一产业(农业)、第二产业(工业)、第三产业(服务业)GDP对居民收入影响进行研究,拟合度分别为0.988、0.977、0.994。从分析结果可以得出昆明市三大产业均对居民收入具有驱动作用,且相关系数和拟合优度差距较小,其中服务业对昆明市居民收入的驱动作用最大。近年来昆明市利用自身环境优势大力发展旅游业,随之带来的是昆明市景区、商城等发展迅速,服务业生产总值占比相对应的增加。经过多年的发展,农业在生产总值上起基础作用,而工业是三大产业发展的中枢,且工业占比也较大。由于三大产业拟合优度均大于90%,因此三大产业均为居民收入的主要驱动力之一,如图9所示。

图9 2000-2017年昆明市三大产业占比图
3.2.2 人口数据和影像总亮度值驱动力
使用2000-2017年人口总量和影像总亮度值对居民收入数据进行相关性分析和回归分析,得出人口总量与居民收入数据Pearson值为0.825,影像总亮度值与居民收入数据Pearson值为0.937,二者均与居民收入显著相关,进行回归分析后人口数据与居民收入的拟合优度为0.681,影像总亮度值与居民收入的拟合优度为0.877。从散点图上看人口与居民收入的数据点分布距离拟合线较远且较离散,影像总亮度值与居民收入的数据点距离拟合线较近,数据在拟合线上下均匀分布且残差较小,因此认为影像亮度值和人口数据对居民收入也具有驱动力,但是驱动效果相对 较小。
4 结 语
1)文中基于DMSP-OLS和NPP-VIIRS夜光遥感数据对昆明市居民收入进行时空变化分析,具有一定的可行性。
2)选取不同的影响因子来研究居民收入变化,进行相关性和回归分析后得出三大产业GDP为昆明市居民收入的主要驱动力,而人口和影像总亮度值也是昆明市居民收入的驱动力,但是其驱动强度要弱于三大产业GDP和影像总亮度值,其驱动力大小顺序为第三产业GDP>第一产业GDP>第二产业GDP>影像总亮度值>人口。
3)由于对夜光遥感数据采用的校正方法不同,以及受到获取遥感影像时使用的传感器差异等因素影响,导致最终处理的数据结果可能会存在一定的差异,但随着传感器性能以及校正方法精度的不断提高,夜光遥感数据的应用范围也会越来越广泛。