两种不同结构机械压力机传动机构运动学分析
2021-11-13闫金良余志海
闫金良,余志海,董 娜
(合肥合锻智能制造股份有限公司,安徽 合肥 230601)
1 曲柄连杆机构压力机运动分析
本节我们将分析曲柄连杆机构压力机的运动,构建其传动机构数学模型,得到曲柄连杆机构压力机滑块的运动方程。曲柄连杆机构结构如图1 所示。将其简化为四杆杆组机构,如图2 所示。

图1 曲柄连杆传动机构图

图2 曲柄连杆传动机构简图
利用复数矢量法建立运动学方程:
由方程组可得位移s、速度v、加速度a:

2 八杆机构机械压力机传动机构运动分析
本节我们将分析八杆机构压力机的运动,构建其传动机构数学模型,得到八杆机构压力机滑块的运动方程。八杆机构主传动结构如图3 所示。将其简化为八杆杆组机构,如图4 所示。

图3 八杆机构传动机构图

图4 八杆机构传动机构简图
采用模块化方法将该机构分为三个二级机构,分别根据矢量方程解析法进行运动分析,得出运动方程。
第一个二级机构如图5 所示,该机构以OO1为机架,L1为原动件,L3为从动件,机构自由度为1。已知条件:各杆L1、L2、L3的杆长,L1杆的初始角度φ1,O1点的X、Y 坐标;所求量:杆L2、L3与X 轴正向的夹角。

图5 第一个二级机构
由解析法列出运动方程:
消去φ2整理得:

式中:

由φ3可得:

第二个二级机构如图6 所示,该机构以OO1为机架,L1、L4为原动件,L6为从动件,机构自由度为2。已知条件:各杆L1、L4、L5、L6的杆长,L1、L4杆的初始角度φ1、φ4=φ3+α,α 为杆L3与杆L4的夹角,O1点的X、Y 坐标;所求量:杆L5、L6与X 轴正向的夹角。

图6 第二个二级机构
由解析法列出运动方程:
消去φ5整理得:

式中:
第三个二级机构如图7 所示,该机构以y 轴为机架,L1、L7为原动件,L8为从动件,机构自由度为2。已知条件:各杆L1、L7、L8的杆长,L1、L7杆的初始角度φ1、φ7=φ6-β;β 为杆L6和杆L7夹角所求量:杆L8与X 轴正向的夹角,滑块的位移量S。

图7 第三个二级机构
由解析法列出运动方程:
由方程求得:

滑块位移:

滑块速度:

滑块加速度:

式中:w7、g7分别为杆7 的角速度与角加速度;w8与g8分别为杆8 的角速度与角加速度。
3 滑块运动方程及运动曲线
下面求解曲柄连杆机构滑块和八连杆机构滑块运动方程并生成相应的位移、速度、加速度曲线。
使用数值计算软件分别求解曲柄连杆机构滑块和八连杆机构滑块运动方程并生成相应的位移、速度、加速度曲线,如图8、9、10、11、12、13 所示。

图8 曲柄滑块位移曲线

图9 八杆机构滑块位移曲线

图10 曲柄滑块速度曲线
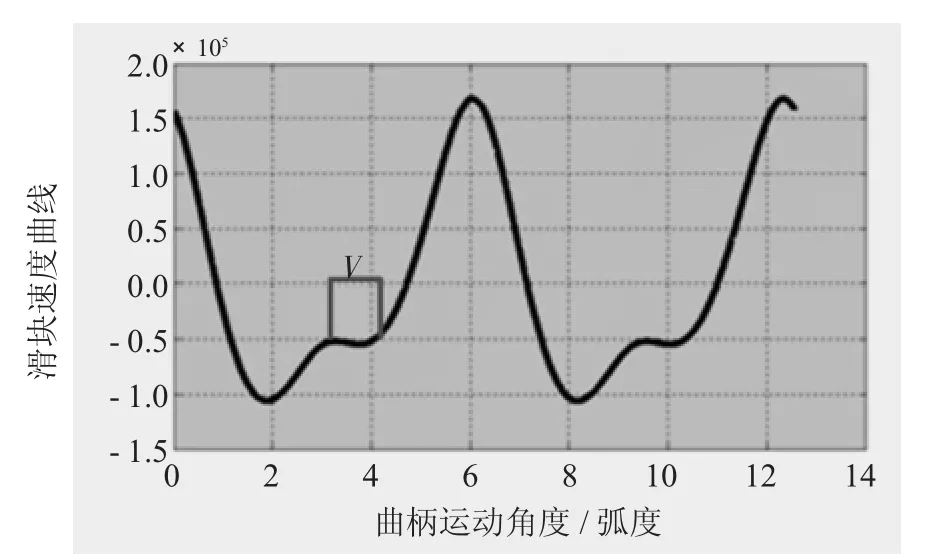
图11 八杆机构滑块速度曲线

图12 曲柄滑块加速度曲线
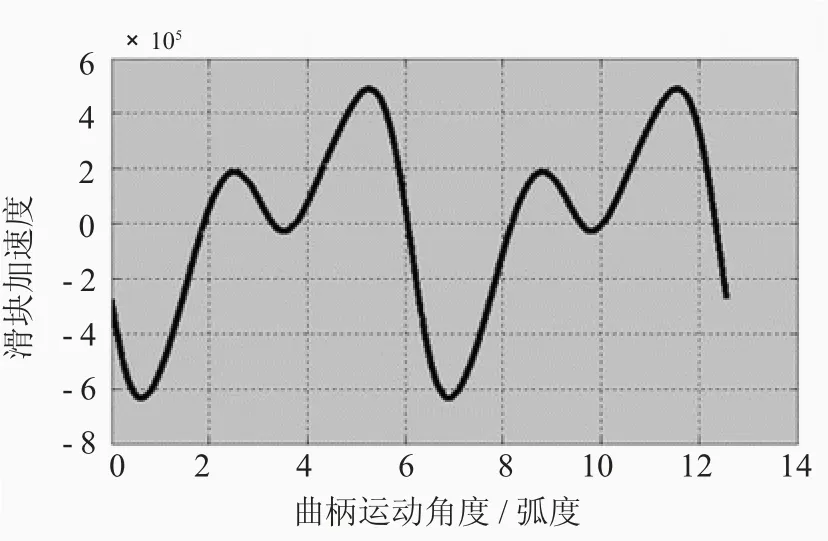
图13 八杆机构滑块加速度曲线
4 对比分析
对比分析两种结构的位移、速度、加速度曲线可得,曲柄连杆机构的机械压力机滑块在拉伸过程中运行的速度、加速度较大。通过速度曲线图可以看出,八杆机构的滑块在工作过程中速度较低且近似为匀速运动,滑块空行程时运动速度较高,具有急回的特性。
5 结论
在薄板深拉伸工艺过程中,曲柄连杆机构的机械压力机滑块在拉伸过程中运行速度、加速度较大,造成拉伸成形中的零件易撕裂或起皱,拉伸件的合格率低,造成品较多。压力机使用的模具在上、下模合模的瞬时冲击较大,使主机、模具的零、部件损坏,从而造成主机、模具的使用寿命降低,而且曲柄压力机的负荷工作区域行程较短,不适应深拉伸工艺的要求。而八杆机构的滑块在工作过程中速度较低且近似为匀速运动,低速运动能有效降低材料变形,符合了板料冲压过程对速度的要求,可有效提高成形件的质量;与此同时,由于减少了系统的动态载荷,从而提高了模具的使用寿命,降低了冲击产生的噪声,优化了工作环境。此外,由于具有急回的特性,滑块运行的循环时间大大缩短,压力机的行程次数被大大提高。且八杆机构以较小的偏心距可以实现更大的滑块行程长度,更好地满足拉伸工艺需要和自动化上下料的需要。但八杆机构结构复杂,制造成本较高。
