BDS-3 卫星导航系统标准单点定位精度分析
2021-11-11石小涛龚真春林成寿陈占勇
石小涛,龚真春,林成寿,陈占勇
(1.32033 部队,海南 海口,570100;2.32016 部队,甘肃 兰州 730020)
全球卫星导航系统GNSS 以其全球性、连续性、实时性和高精度等特点,已发展成为当前海上、陆地、空中等通用导航系统。北斗卫星导航系统(BDS)是我国重要的空间基础设施之一。2020 年7 月31日,北斗三号(BDS-3)全球卫星导航系统建成暨开通仪式在人民大会堂隆重举行,标志着由我国自主建设、独立运行的全球卫星导航系统已全面建成,并向全球提供PNT(定位、导航与授时)服务。
GNSS 单点定位又称为绝对定位,根据其所采用的观测值类型分为标准单点定位SPP 和精密单点定位PPP。标准单点定位是以测码伪距作为观测值的一种绝对定位方式,定位精度通常低于相对定位和精密单点定位,但因其具有设备价格低廉、无需基准站、数据处理简单,能实时获取导航定位信息等优点,目前仍有广阔的应用市场[1]。
本文以兰州某地的实测观测数据为研究对象,进行BDS-3、GPS 系统的标准单点定位精度对比分析,得出一些可供参考的结论。
1 BDS-3 全球导航卫星系统简介
北斗卫星导航系统简称北斗系统(BDS),分为北斗一号(BDS-1)、北斗二号(BDS-2)和北斗三号(BDS-3)三个建设发展阶段。BDS-3 系统于2009 年启动,在北斗二号导航卫星系统稳定运行服务的基础上,2015 年完成了新技术和关键技术的试验验证,并于2020 年7 月29 日完成了空间星座部署建设工程。BDS-3 系统由空间段、地面段和用户段三部分组成。其中,空间段由24 颗MEO 卫星(地球中圆轨道卫星)、3 颗IGSO 卫星(倾斜地球同步轨道卫星)和3 颗GEO 卫星(地球静止轨道卫星)三种不同轨道的卫星组成,并视情部署在轨备份卫星。GEO 卫星轨道高度35786km,分别定点于东经80°、110.5°和140°;IGSO 卫星轨道高度35786km,轨道倾角55°;MEO 卫星轨道高度21528km,轨道倾角55°。地面段包括主控站、时间同步/注入站和监测站等若干地面站,以及星间链路运行管理设施。用户段包括北斗及兼容其他卫星导航系统的芯片、模块、天线等基础产品,以及终端设备、应用系统与应用服务等。
相比较BDS-2 系统,BDS-3 系统整体性能大幅提升。在面向全球范围提供定位导航授时(RNSS)方面,实现全球范围内定位精度优于10m,测速精度优于0.2m/s,授时精度优于20 nm;亚太地区定位精度优于5m,测速精度优于0.1m/s,授时精度优于10 nm[2,3]。
BDS 采用北斗坐标系(BDCS),与2000 中国大地坐标系(CGCS2000)定义一致。时间系统为北斗时(BDT),起始历元为2006 年1 月1 日协调世界时(UTC)00 时00 分00 秒[4]。
2 GNSS 标准单点定位模型
伪距定位是通过空间距离的后方交会来实现。由于实际应用中含有3 个测站未知数与1 个接收机钟差未知数,故接收机至少需跟踪四颗卫星组成四元方程组,得到用户的三维坐标。观测方程为[5]:

式中,为伪距观测值;(xs,ys,zs)为信号发射时刻的卫星轨道坐标;(x,y,z)为信号接收时刻的测站坐标;dts为卫星钟差;dtr为接收机钟差;dρ 为卫星星历误差;I 电离层误差;T 为对流层误差;B 为卫星硬件延迟;b 为接收机硬件延迟。
标准单点定位数据处理时,发射时刻的卫星位置、卫星钟差和卫星硬件延迟利用广播星历进行计算,忽略卫星钟差残余的影响;对流层采用经验模型计算;电离层采用经验模型计算或双频方法消除;忽略接收机硬件延迟和多路径效应的影响。
3 试验对比分析
3.1 试验数据
本次实验数据于2020 年9 月15 日在兰州某地采用华测X5 智能RTK 多星系统接收机获取,观测时长为4h53min,卫星高度截止角15°,采样间隔10s,共计观测历元1761 个。
3.2 定位精度对比方法
单点定位精度分为水平方向定位精度和垂直方向定位精度。本文采用将接收机的每观测历元的定位结果同RINEX 数据O 文件给出的测站坐标统一转换到测站坐标(N、E、U)下进行比较,对比BDS-3、GPS 系统在N、E、U 方向上误差序列,统计结果为均方根误差RMS 值。
3.3 结果对比及分析
卫星可见性及PDOP 对比分析。可见性指的是接收机在指定遮蔽角的情况下可观测到的卫星个数。表现了系统在特定的区域和时间内为用户提供导航服务的能力。PDOP 为空间位置精度因子,是评定位置精度质量的重要参数,一般情况下,其值越小,说明定位精度越高[6]。测站在观测时段内,BDS-3、GPS 系统的相应的可见卫星数和PDOP 值统计如图1、如图2 所示。

图1 BDS-3、GPS 系统可见卫星数统计
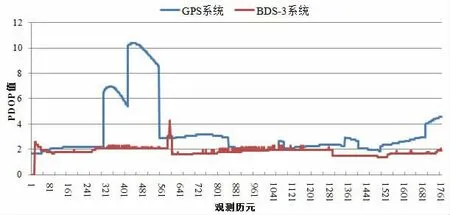
图2 BDS-3、GPS 系统PDOP 值统计
由图1 可知,BDS-3 系统可见卫星数最少为1颗、最多为15 颗,平均为13 颗,在开始观测历元的1~15 个时,观测到的卫星数少于3 颗(无法计算PDOP),此后,可见卫星数均在7 颗以上;GPS 系统可见卫星数最少为5 颗、最多为9 颗,平均为7 颗。观测时段内BDS-3 系统可见卫星数多于GPS 系统。
由图2 可知,BDS-3 卫星的PDOP 值除在观测历元600-641 间有较小的突变外,其他基本在2.0左右,平均值为1.9;GPS 卫星的PDOP 在观测历元321-561 间发生较大突变,出现峰值,最大值为12.8,平均值为3.9。二者卫星PDOP 值所出现的突变和峰值会对其对应的观测历元定位精度有影响。
标准单点定位在N、E、U(北、东、天)方向上对比分析。在分析BDS-3、GPS 系统卫星PDOP 值的基础上,对二者在N、E、U 方向上定位精度进行分析,其误差序列统计如图3、图4 和图5 所示。
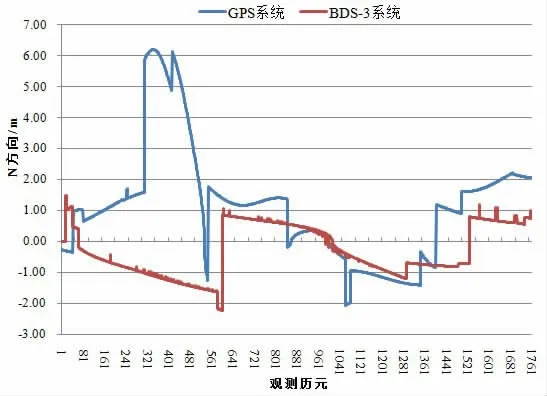
图3 BDS-3、GPS 系统N 方向定位误差序列图
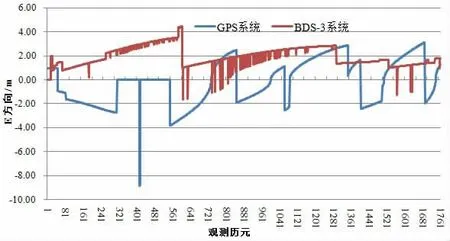
图4 BDS-3、GPS 系统E 方向定位误差序列图

图5 BDS-3、GPS 系统U 方向定位误差序列图
从图3、图4 和图5 可看出,BDS-3 系统在N、E、U 三个方向上除个别历元定位出现跳跃外,大部分历元的误差值分别在1.4m、2.5m 和4.0m 以下,E方向精度最高,U 方向精度最低,其RMS 统计值分别为0.54m、1.44m 和2.27m。GPS 系统在N 方向个别历元出现跳跃,E、U 方向出现了峰值,N、E、U 三个方向RMS 统计值分别为0.68m、1.01m 和2.61m,同样是E 方向精度最高,U 方向精度最低。结合图2,BDS-3、GPS 系统在N、E、U 三个方向定位误差出现跳跃外和峰值,其主要原因是由对应历元的PDOP 出现跳跃外和峰值所致。
整体对比而言,BDS-3 系统同GPS 系统标准单点定位精度相当,在N、U 方向略优于GPS 系统,E方向上低于GPS 系统。
4 结语
北斗三号全球卫星导航系统(BDS-3)自开始建设到建成向全球提供高品质服务以来一直备受关注。本文在简要介绍BDS-3 系统的空间星座构成,采用坐标、时间系统,以及提供的全球PNT 服务性能等基础上,利用实测数据对其标准单点定位精度进行测试分析,得出在兰州某地BDS-3 系统的定位精度优于5m,整体定位精度同GPS 系统相当,在N、U 方向略优于GPS 系统,E 方向上低于GPS 系统的结论。由于时间及观测资料不足等原因,所得结论不完全具有代表性,但仍有一定的参考价值。
