水下激光成像系统分辨率自动检测算法研究∗
2021-11-11唐耿彪关夏威
唐耿彪 张 巍 关夏威
(1.中科芯集成电路有限公司 无锡 214062)(2.武汉第二船舶设计研究所 武汉 430205)
1 引言
近年来,水下激光成像技术是水下成像领域最热门的课题之一。激光在水下传播会受水体吸收和散射作用,致使距离较远的目标信号被淹没,导致成像对比度差、分辨率不高[1~3]。分辨率是水下激光成像系统的重要性能指标,以水下激光靶板图像上所能识别的最大分辨率线对为衡量标准。目前,常用的检测手段是目测法,通过人眼直接观察和识别监视器上水下激光靶板图像中的线对,但当目标距离较远时,光线会在水中快速衰减,图像易受到光照不足和噪声等问题的干扰,而且目测法具有主观性,易受环境影响,不能定量分析,且检测稳定性不高。
针对上述问题,本文提出了一种基于信息熵和多峰直方图的分辨率靶板自动检测算法,该算法能自动计算靶板中线对数目,检测系统的分辨率,且能抑制光照和噪声的影响,准确率较高。
2 图像定位和提取
对分辨率靶板图像中不同线宽的线对区域进行定位和提取是进行分辨率自动检测的第一步,本文采用的分辨率靶板图案为黑目标白背景,尺寸为280mm×280mm,四周分布不同分辨率线对,黑目标由不同分辨率线对组成,线宽分别为1/3、1、2、3、4、6、8、10、20、40、60、80、100,单位是 mm/LP,共 13个,分辨率靶板如图1所示。

图1 分辨率靶板
由于分辨率靶板尺寸及各线对区域相对位置固定,本文采用等比例尺缩放法对线对区域进行定位[4],在对靶板图像中各线对进行定位前,选取线宽为100mm/LP的线对作为基准,依照此线对在分辨率靶板中的大小以及与其他线对之间的相对位置,计算其他线对在靶板图像中的位置。具体计算步骤如下。
1)求图像缩放因子scaleX和scaleY

其中115和150是靶板上线宽为100mm/LP线对的宽和高,单位是mm,width和height是靶板图像上线宽为100mm/LP线对的宽和高,单位是pix。
2)求所有线对在图像上的坐标topX、topY、bot⁃tomX和bottomY
其中x、y是线宽为100mm/LP的线对在靶板图像上的坐标,i∈[1,22]。

图2为768×576的水下激光靶板图像定位结果。
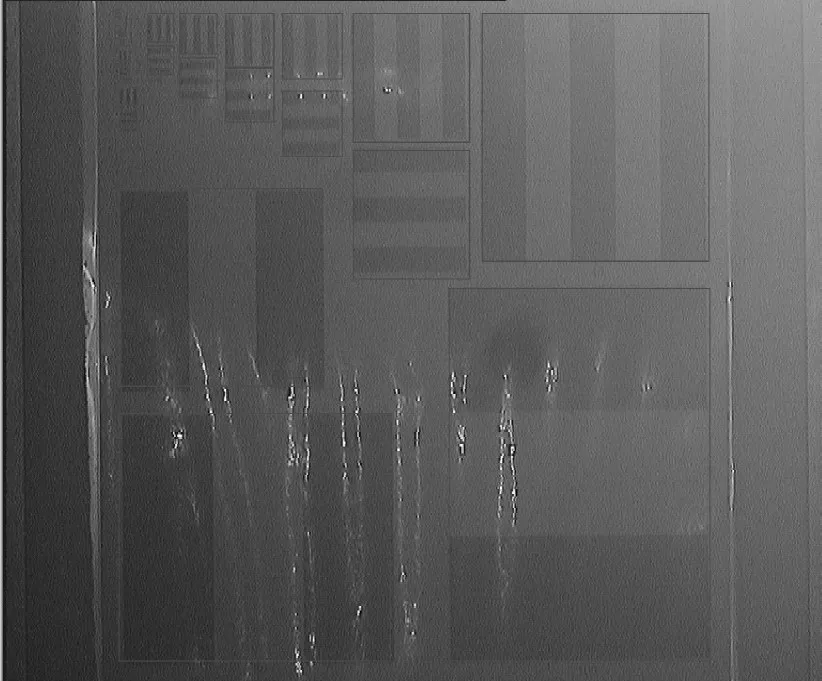
图2 图像定位
在确定不同分辨率的线对在靶板图像中的位置后,提取相应区域的图像进行分割和识别。
3 图像分割和识别
线对图像直方图统计结果直接影响线对识别的有效性,对水下激光成像系统分辨率检测尤为重要。本文提出一种基于多峰直方图检测线对数目的方法,该方法对线对图像统计直方图,利用差分法确定波峰和波谷的位置,能有效消除噪声等因素的影响,准确计算图像中线对数目。
在统计线对图像直方图之前,对线对图像进行分割是一个关键步骤和难题,图像分割的准确程度直接影响线对数目检测的准确性。目前常用的阈值分割法有Otsu法、Bernsen法等。本文在对水下激光成像系统采集的靶板图像进行研究和分析的基础上,采用基于最大信息熵求阈值的方法对图像进行分割,该方法能有效地区分目标对象和背景。
3.1 基于最大信息熵的阈值分割


其中-pilg(pi)为随机值 pi的信息量,当 pi=0时,其信息量取0。
根据信息论可知,信息熵代表图像的信息量。对离散的信息熵,当其概率相等时,信息熵的取值最大。对一副图像而言,当信息熵取最大值时,对应的灰度值正处于灰度直方图波谷的位置,这符合图像分割时阈值的选取原则。
基于最大信息熵的图像分割算法步骤如下。
1)计算线对图像中灰度值为i的概率,计算公式如下:

其中 pi表示灰度值为i的点在图像中出现的概率,Ni表示出现的次数,w×w表示图像的大小。
2)假设灰度值 t(t=0,1,...,255)将图像分为前景和背景两个区域,计算对应t的信息熵Ht,计算公式如下:

其中HFt是前景区域的信息熵,HBt是背景区域的信息熵,计算公式如下:
其中 pi表示灰度值为i的概率,Pt表示前景区灰度值所对应的概率之和,计算公式如下:

3)求使信息熵取最大值所对应的灰度值t,将该值确定为图像分割的阈值T,计算公式如下:

4)用阈值T对图像进行分割,计算公式如下:

其中G(x,y)表示图像(x,y)处的灰度值。
本文采集了不同光照条件下的分辨率靶板图像,并以线宽为10mm/LP的线对图像为例进行预处理,如图3所示,并测试了三种阈值分割算法的效果,如图4所示。

图3 图像预处理

图4 图像分割
由图3知,经图像预处理后图像的质量有一定的提高,高斯滤波后消除了图像中的部分噪声。由图4知,Otsu法能较好地抑制噪声,但对对比度较低的图像较敏感,容易丢失重要信息;Bernsen法二值化后的图像不够清晰光滑,且对噪声敏感。本文采用的基于最大信息熵的方法对线对图像进行分割,从图4中可看出,既能完整地保留图像中的重要信息,又有效地抑制了噪声,同时尽可能地消除了光照的影响,有利于识别图像中的线对数目。
3.2 基于多峰直方图的线对识别
多峰直方图靶板检测算法的基本思想是按行统计分割后图像中灰度值为255的像素点,以行号为横坐标,像素点数为纵坐标绘制直方图,通过差分法确定直方图中波峰和波谷的位置,计算有效波峰个数,进而统计图像中线对的数目。
为使检测的准确性更高,对分割后的图像进行滤波处理,常用的滤波算法有均值滤波、中值滤波和高斯滤波等,但对分割后的图像处理的效果都不理想[7~9]。本文结合线对图像的特点,提出一种非线性滤波算法,能有效地解决图像中噪声和粘连等问题,算法的步骤如下。
1)按行统计图像中灰度值为255的像素点个数Ni,并求其最大值M,计算公式如下:

其中h是图像的高。
2)用最大值M 的1/3作为判断依据消除图像中孤立的点,计算公式如下:

3)按列对图像执行类似操作。
以线宽为10mm/LP的线对图像为例,滤波后的图像如图5所示。

图5 滤波后图像
由图5知,滤波后图像中孤立的点、无效的粘连被去除,有利于直方图的统计。
线对图像按行统计直方图如图6所示。

图6 图像直方图
由图6知,直方图中波峰代表图像中线对的数目,但还存在一些噪声,边缘处较明显,可设置阈值消除其影响,如图7所示是以阈值为峰值处理后的靶板直方图。

图7 处理后直方图
由图7知,处理后直方图中波峰和波谷清晰可见,计算每个横坐标点的差分,当差分结果为负值时,表示波峰开始,为正值时表示波峰结束,统计波峰数量和波峰长度[10~12]。当波峰长度小于某一阈值时,可认为是无效的线对,本文选择的阈值是波峰最大长度的1/8。
在检测系统分辨率时,从线宽最小的线对图像开始识别,如果当前线对图像的识别结果与实际线对数目相等,则系统的最高分辨率为当前线对线宽的倒数。
4 实验结果与分析
针对某型水下激光成像系统,采用目测法和自动检测法,以对比度为0.88的分辨率靶板为例,在系统与靶板之间的距离为1.54m、水体衰减系数不同的场景下检测系统的最高分辨率,两种方法的检测结果如表1所示。
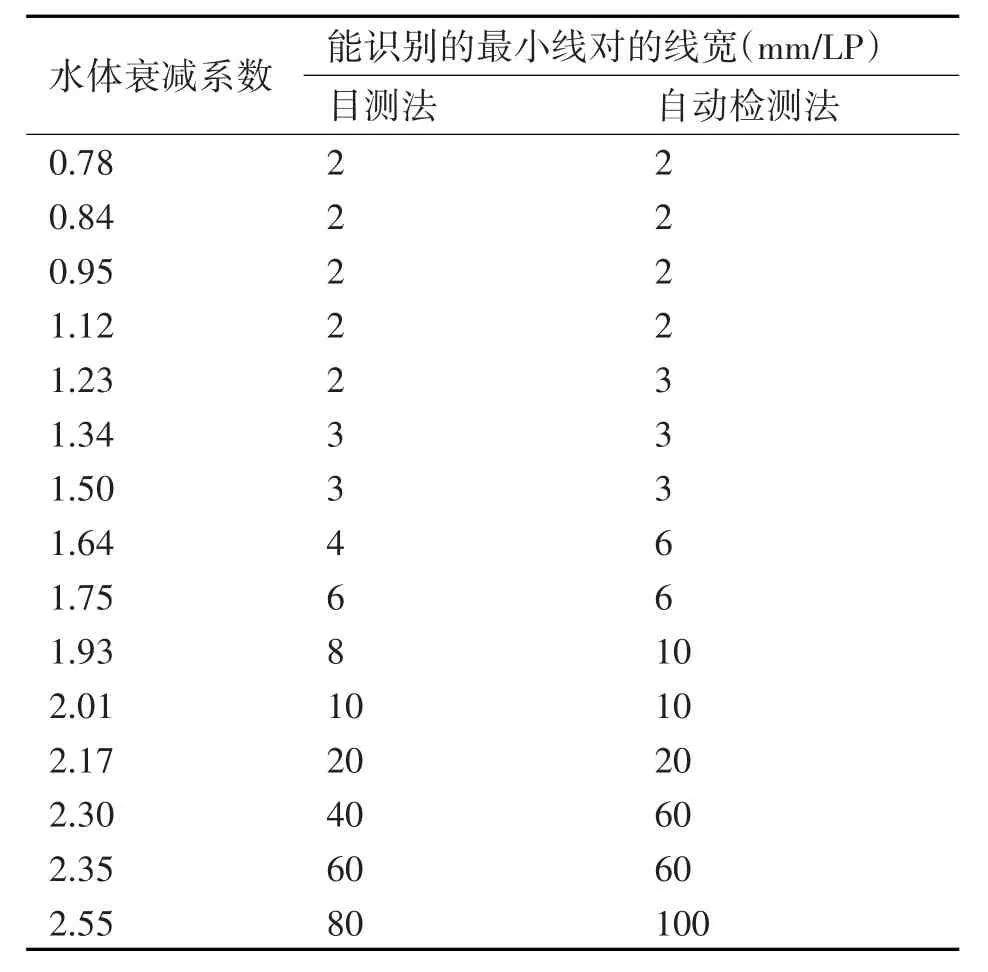
表1 检测结果
由表1知,两种检测方法的结果相差不大,误差不超过一组分辨单元,属于可接受的误差范围,且自动检测方法的准确性并未随水中噪声的增加而降低。
5 结语
本文提出了一种基于信息熵和多峰直方图的分辨率靶板自动检测算法,通过图像定位和提取,采用最大信息熵法对靶板图像进行分割,结合滤波函数去除噪声和粘连部分,最后使用基于差分的多峰直方图算法识别了线对数量、检测出系统分辨率。实验结果表明,基于信息熵和多峰直方图的分辨率靶板自动检测算法实现了对水下激光成像系统分辨率指标的客观评价,避免了人为因素的影响,而且对光照和噪声具有鲁棒性,有较高的稳定性和准确性。
