卫星着舰引导载波相位多参考站一致性技术研究∗
2021-11-11杨少帅
杨少帅
(中国西南电子技术研究所 成都 610036)
1 引言
基于卫星导航技术的飞机精密进近着陆/着舰系统是目前起降引导的主用系统之一。而飞行器起降是安全风险非常大的过程,尤其是着舰,甲板尺寸狭小并且运动,对于引导系统要求苛刻。完好性是指导航系统所提供信息正确性的置信度的测量,也包括系统在无法用于导航时向用户发出告警的能力,是与飞行安全相关的性能。由于卫星导航其固有的脆弱性,复杂多变着陆场条件,不可避免存在有意或者无意的干扰等,更增加了完好性的风险。因此完好性是基于卫星导航技术的精密进近引导必须解决的难题。
在卫星导航完好性监测方面,多参考站一致性监测的B值算法处于核心的位置。应用于着陆的GBAS系统,采用伪距差分的技术体制,B值定义为伪距修正量均值与排除了某个参考站接收机观测之后的伪距修正量均值之差[1~2]。牛飞[3]等研究了GBAS的完好性观测域监测问题,提出基于B值的Sigma异常监测算法,能够有效监测GBAS参考站异常随机误差。李亮等研究了基于MRCC的完好性监测,通过一致性算法将伪距差分定位精度提升32%,差分服务定位可用性提升到97%[4],其一致性研究主要针对固定基准站的伪距观测,主要针对固定基准站的伪距观测。由于伪距差分已不能满足精度需求,着舰引导需要采用载波相位差分的技术体制,王官龙提出了北斗三频观测量无故障导航的算法,建立了载波相位精度与差分定位精性能的关系,表明相位测量精度优于0.7cm,才能保证差分引导精度[5]。因此GBAS系统的多站一致性监测方法已不适用[6~7]。
在卫星导航的着舰系统中,参考站布局在运动的舰船平台上,甲板跑道相比于机场跑道更为狭小,母舰位置上处于运动状态,受海浪影响,位置随时运动且无法实时精确标定,姿态上也具有扰动[8~10]。同时由于卫星导航系统本身可能存在的异常[11]、射频干扰天线相位中心变化、多径、抗干扰天线引入的误差,易造成载波相位的精度恶化和异常[12]。着舰系统在完好性监测上必须同时关注伪距观测和载波相位观测[13~15],需要研究基于移动参考站的着舰系统载波相位多参考站一致性监测方法。
2 多站一致性监测算法模型
2.1 B值定义
多站一致性监测的任务就是计算和检验B值,以隔离不正常的接收观测。传统意义上,B值表征不同卫星针对不同接收机修正量的连续性,监测实现过程基于舰载M个基准站接收机中的一个被假设为估计伪距校正量误差的标准接收机,其余M-1个接收机把偏离标准接收机的估计值与预定的告警阀值比较。
B值定义为某测量值与排除了某个通道后的N各测量值平均值的差,计算方式为
其中m,n为通道编号,Xm,Xn为对应的检测统计量,Bm为m通道的B值,N为总通道数量。
在没有故障条件下,B值反映了伪距校正量与均值的差异,稳定在一定范围内。一旦卫星故障或接收机故障,B值则会发生变化。
2.2 着舰引导系统伪距和载波B值构造


图1 舰船多GNSS参考站天线布局示意图
其中A、B、C、D参考站布局同一舰船上,两两距离在数百米以内,卫星信号传播到四个参考站经过的传输路径基本一致,因此电离层延迟、对流层延迟基本一致,即,

为了保证更好的观测和一致性结果,舰船多参考站采用同一型号卫导天线和接收机,并通过公共的外部高精度时钟为接收机提供频率基准,因此,接收机噪声服从同分布,接收机钟差基本保持一致,即,
cδtra=cδtrb=cδtrc=cδtrd
由于整周模糊度的存在以及A、B、C、D四个参考站天线布局位置不同,载波相位和伪距观测不同,进一步地,舰船处于运动状态中,精确的A、B、C、D参考站坐标无法精确获取,因此不能根据标定坐标计算精确的伪距和载波修正值。因此,需要将各参考站的测量量从天线位置映射转换到舰船参考点(SRP)上,并建立多站之间建立载波相位、伪距的一致性,才能够进行一致性监测。
基于载波相位差分的着舰引导系统多站一致性监测方法,参阅图2,其具体步骤如下。
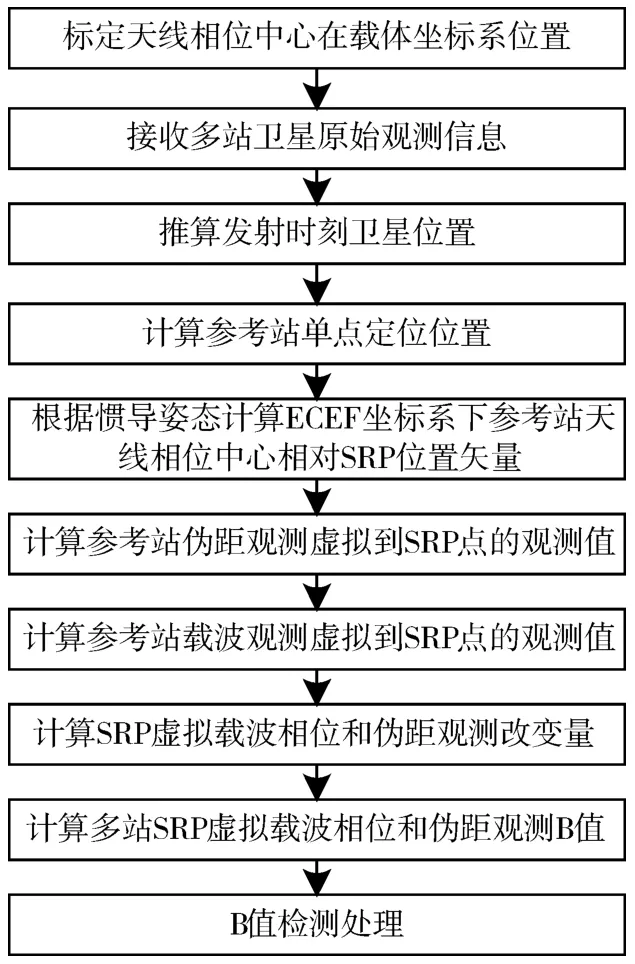
图2 载波相位差分着舰引导多站一致性监测

第二步,接收多站卫星导航原始观测信息,主要包括导航电文、时间、伪距、载波相位、多普勒等原始观测,并多站观测信息时间对齐;
第五步,计算参考站伪距折算到SRP点处的虚拟伪距观测值;

第六步,计算参考站载波相位折算到SRP点处的虚拟载波观测值;

第七步,计算载波相位虚拟观测的改变量和伪距改变量;

第八步,多参考站重复上述第三步至第七步过程,计算多参考站针对不同卫星的伪距虚拟观测量和载波相位虚拟观测量改变值。根据虚拟伪距观测和虚拟载波相位观测量改变值,计算伪距和载波相位观测的B值Bρ,Bφ。
最后,B值与参考门限比较,如果超过检测门限,设定检测未通过标志。
3 故障对B值的影响分析
本节主要通过理论分析,建立一致性监测算法与故障模式之间对应关系,分析不同故障模式对B值及其检测统计量的影响。
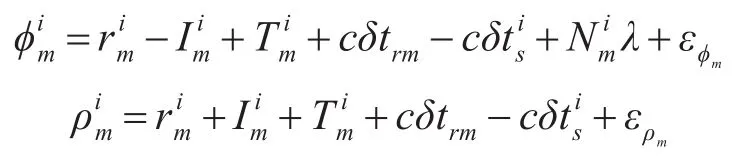
假设伪距和载波由于卫星钟跳、多径等原因产生了阶跃突变,则伪距观测和载波观测为
其中,l和θ分别为伪距和载波跳变的幅度,m为接收机编号,n为卫星编号。
3.1 观测阶跃突变对平滑伪码影响
载波平滑伪码能够提高伪距的观测精度,载波相位平滑伪距的基本过程如下:
其中,Ns为平滑时间常数。
平滑伪距受载波和伪距的双重影响,在伪距和相位阶跃突变后,对于平滑伪距的影响如下:

3.2 观测阶跃突变对观测B值影响
观测B值以虚拟载波或已平滑的虚拟伪距作为检测统计量,伪距和载波产生突变之后,检测统计量B值如下:

3.3 电离层梯度误差影响分析
为了监视电离层异常,进一步的构建电离层梯度检测统计量。电离层梯度反映的是电离层的变化情况,可以看成伪距和载波加入斜坡变化,载波相位和伪码引入的偏差变化如下:

其中,le和θe分别为电离层误差对载波和伪距影响。
采用滑动几何平均的方法来估计码-载波偏离,固定平均的算法如下:


4 实验验证与分析
实验验证主要采用实验室内,构造半物理验证环境并注入故障条件,测试B值及检测统计量故障响应,在超过预定门限后,提供告警信息。
4.1 测试验证环境
测试环境主要包括思博伦GSS9000卫导模拟器、信号功分器、铷原子钟、4套GNSS接收机、多串口卡、计算机。利用卫导模拟器产生两个不同位置参考站信号,纬经高坐标分别为(30°,104°,500)和(30°,104°,600)。端口1信号通过功分器与接收机1、接收机2相连。端口2信号通过功分器与接收机3、接收机4、铷原子钟相连。铷原子钟接收模拟器信号,经过时钟驯服锁定后,为接收机提供10MHz高稳低相噪频率信号。卫导原始数据通过多串口卡连接到联试计算机上。
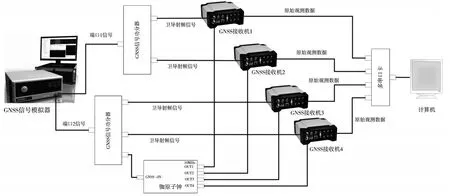
图3 实验室测试环境组成图
4.2 实验仿真
实验仿真总时间长度1800s,更新率0.1Hz,以北斗3号卫星为例,进行一致性检测分析。
4.2.1 正常观测下的观测B值及检测统计量
正常情况下,未注入故障的卫星观测检测统计量B值如图4所示,可以看出,观测量虚拟到同一个观测站点后计算检测统计量和B值,伪码和载波B值保持良好的稳定性,码和载波偏离度及其B值维持在很小的范围内(mm级别变化)。

图4 正常观测下的检测统计量及B值响应
4.2.2 载波周跳对观测检测统计量及B值影响
在第500s对C站3号卫星加入100周周跳,故障激励表达式如下:

原始伪距、平滑伪距、载波和码-载波分离度B值变化如图5所示。
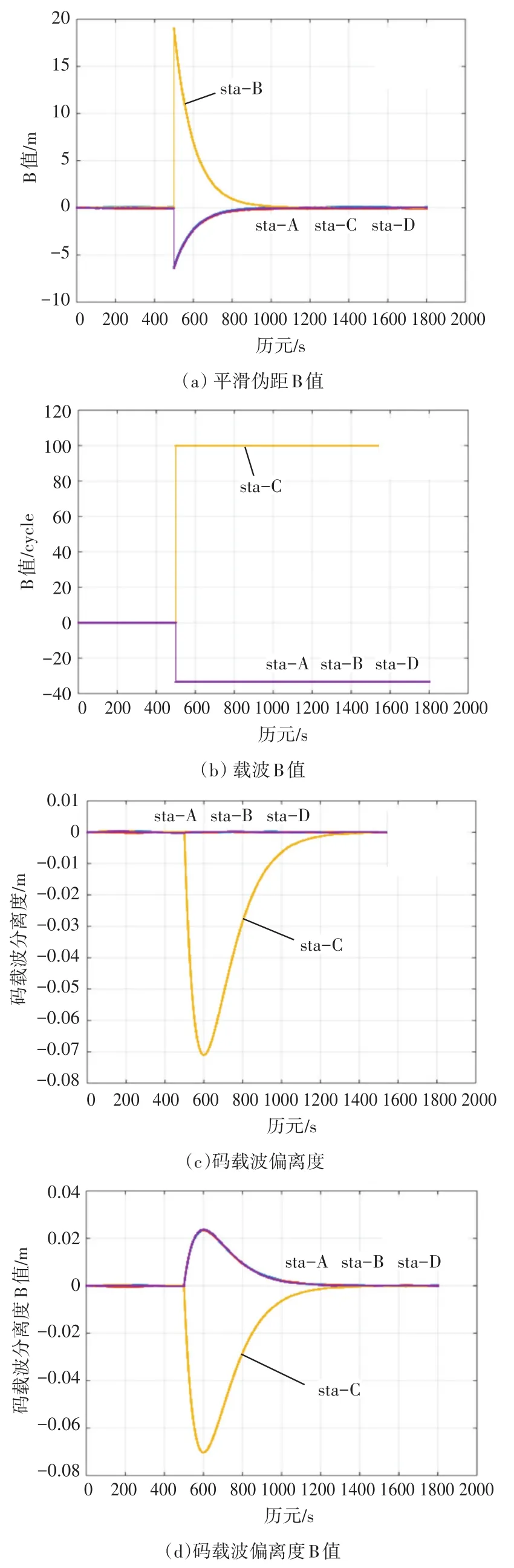
图5 加入周跳后检测统计量及B值响应
可以看出,加入载波周跳后,受相位突变的影响,C站平滑伪距B值在500s出现突变,突变幅度与平滑周期常数有关,本仿真中,伪码平滑时间常数为100s,在发生突变的C站伪距B值达19m,A、B、D站B值突变幅度约为C站1/3,但随着时间推移,逐渐收敛恢复到至0左右,收敛时间在500s左右,与平滑伪距对载波突变的响应理论分析相符。载波B值C站B值在500s后,一直维持在100周,而A、B、D站B值维持在33周左右,并未恢复至0。码-载波偏离上,受码载波分离度平滑和伪码平滑的综合影响,C站在500s开始,逐渐发生增大,A、B、D站变化幅度约为C站的1/3,600s左右达到B值幅度的最大值,随后逐渐减小恢复至0,同时随时间推移逐渐收敛至0。
4.2.3 多径对观测检测统计量及B值影响
在第600s~605s对C站3号卫星伪距注入30m多径,故障激励表达式如下:

原始伪距、平滑伪距、载波和码-载波分离度B值变化如图6所示。

图6 加入多径后检测统计量及B值响应
可以看出,加入多径后,受伪距突变的影响,C站平滑伪距B值幅度在600s开始增加,由于平滑因子的存在,平滑伪距受到的影响只有1/Ns,时域内检测具有一定的滞后性。因此,平滑伪距B值在故障点后呈现出累积增加的趋势,逐渐超过检测门限(0.5m)。伪距多径不影响载波,因此载波B值无变化。码-载波偏离上,C站B值从600s开始增大,A、B、D站变化幅度约为C站的三分之一,多径误差消失后,由于滤波效应,码载波偏离度B值随时间增加逐渐收敛至0。
4.2.4 电离层梯度对观测检测统计量及B值影响
在第500s~673s对C站加入0.1m/s的电离层梯度误差,故障激励表达式如下。

原始伪距、平滑伪距、载波和码-载波分离度B值变化如图7所示。
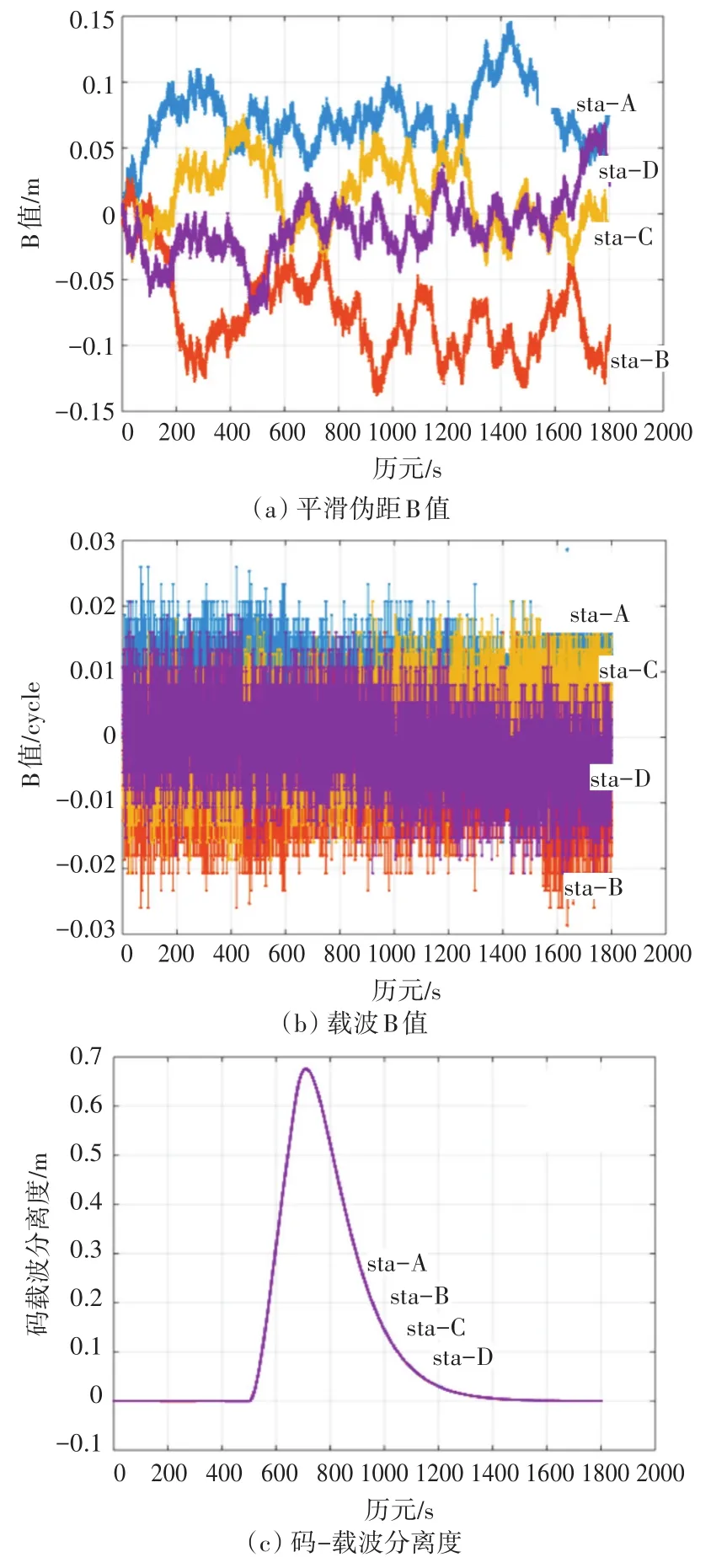
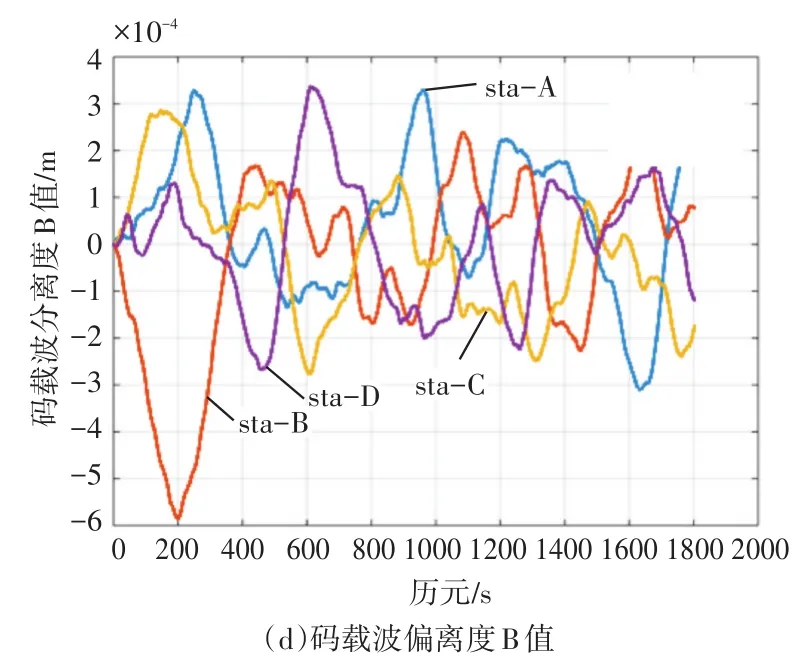
图7 加入电离层梯度后的检测统计量及B值响应
从图中可以看出,在电离层梯度的影响下,伪距和载波B值无明显变化。在1000个历元有限的时间内,平滑伪距B值相对比与正常环境下的B值无明显变化。由于平滑伪距与载波的逐渐分离,因此码-载波偏离度在电离层梯度加入后产生偏离,但不同接收机由于区域靠近,在伪码-载波观测精度接近的条件下,偏离度区别不大,从上图可以看出,偏离度基本重合,体现在B值上,与正常无分离时无明显不一致。
所以,B值检验方法可以有效检测周跳、多径,但无法检测出电离层的梯度效应。
5 结语
本文针对基于卫星引导的着舰对载波相位完好性监测的需求,开展基于移动多参考站的伪距、载波相位一致性技术研究。本文提出了基于虚拟观测的多参考站B值构造方法,分析了不同故障对平滑伪码、伪码/载波B值和码载波偏离度的影响。以虚拟载波、平滑伪距作为一致性检测统计量,构建B值,在实验室建立半实物测试环境进行测试验证。通过实验测试表明,本文提出的基于虚拟观测的移动多站一致性监测方法能够有效检测周跳、多径,检测时间在单历元以内,对于影响所有接收机通道电离层的梯度效应检测能力有限。
