电力巡检无人机精准降落方法研究与应用
2021-11-10王永强车凯戴铎王红星高超黄郑
王永强 车凯 戴铎 王红星 高超 黄郑


关键词:电力巡检无人机;四维垂直定位;计算机视觉;四维速度矢量控制;自适应抗干扰
无人机巡检对于提高输电系统巡检效率,降低人力成本和人员安全风险等方面发挥着重要的作用。在巡检无人机整个工作过程中,降落定位是一项非常重要但存在较大干扰的技术难点。传统的无人机降落技术主要包括惯性导航、卫星导航、多普勒导航、地形辅助导航等方法。惯性导航方法不受外界任何信息影响,稳定性好,但定位误差随时间不断积累,因而精度较低;惯性导航方法具备全天候、连续精密定位能力,实时性较好,但易受电磁干扰影响,稳定性较差;多普勒导航抗扰能力强、适用于各种气候条件,但存在累计误差,且定位精度受地形制约。
与传统的导航技术相比,基于计算机视觉的导航与定位算法具有成本低、精度高、抗扰性强等优点,在电力巡检无人机完全自主降落中具有较高的应用价值。通过识别匹配多层嵌套标识实现无人机降落定位,具备识别率高、编码空间大等优点;提出基于DGPS归航引导和机器视觉助降定位的无人机飞行控制系统,并在实时图像的预处理、特征提取方面取得了较好的研究成果。利用图像处理技术实现了无人机拍摄图像的去噪、边缘检测和图像提取,提高了无人机的线路跟踪能力。然而,目前的无人机降落定位成果大部分集中于军事领域,在电力巡检方面研究相对较少,同时缺少完整的、系统的无人机降落过程研究与改进。
针对无人机降落过程中的三个主要问题,即降落目标位置定位、降落姿态/速度控制、降落过程误差自适应调节,以计算机视觉为基础,提出了一种新型的、系统的无人机降落定位方法,分别从垂直方向、水平方向上优化无人机定位精度,同时通过抗干扰设计提高无人机的定位鲁棒性。在电力巡线现场对提出的无人机降落定位方法进行了实验,结果证明所提方法具有较高的降落定位精度。
1无人机自适应降落方法
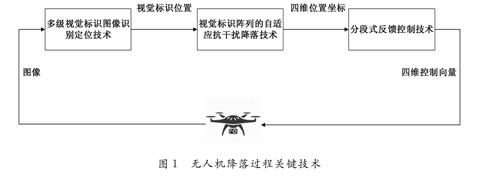
一个完整的无人机降落控制过程主要由垂直目标定位,水平姿态控制和干扰自主抑制组成,它们之间的关系如图1所示。
1.1基于多级视觉标识识别的四维垂直定位
通过设置降落标识(即marker)可以实现物理世界和图像投影之间的相互对应,进而引导无人机在垂直方向上进行自主降落。视觉标识是由黑色边框和矩阵形状白色方块组成的图案,具有灰度阈值相差大,边缘明显、易于识别等优点,且每幅标识有唯一的ID,如图2所示(图中共有6个视觉标识)。
当无人机接收到降落指令时,立即启动自主降落程序,通过基于计算机视觉技术的边缘检测、多边形拟合、无效标识过滤、投影变换、标识code提取、标识ID计算等步骤,实现无人机在垂直方向上的精准降落控制。算法流程如图3所示。
(1)边缘检测
当无人机发现视觉标识后即拍摄实时图像并将其转化为灰度图,利用改进的Canny算子得到二值化边缘图,利用各向异性扩散滤波器去除图像噪声,进而提取图像轮廓信息。
(2)多边形拟合
在提取轮廓信息后,利用Douglas-Peuckeralgorithm算法对多边形进行拟合处理,从而一个连续光滑曲线折线化以便于识别。
(3)过滤无效标识
如果(2)中拟合的多边形顶点数为4,则认为是矩形,将其加入至候选标识列表中;遍历所有候选标识,对于距离过近嵌套的矩形,移除内部的矩形,保留外部矩形,这一步骤的目的是过滤掉标识内部的矩形块。
(4)投影变换
投影变换是将图片投影到一个新的视平面,包括线性变换、平移变换和透视变换,本文将图像中的候选标识投影至正视角度的50x50的图像,从而将任意视角下的四边形转换为正视角度下四边形。
(6)标识ID计算
对(5)中提取的标识code计算最小汉明距离,选择汉明距离最小的作为最终的编码矩阵,即标识ID,如图5所示。
基于计算机视觉技术的无人机四维标识坐标信息精确识别,保证了无人机在垂直方向上的精确定位(即四维垂直定位)。
1.2基于分段反馈方法的四维速度矢量控制
在提升无人机在垂直方向上精准识别视觉标识的同时,还需要在水平方向上保证无人机飞行的稳定性,这样才能保障降落过程的完整和精度。
(5)标识code提取
将(4)中50×50图像二值化处理后,均分为7X 7的方格(这是因为使用的标识是7 X 7等分的),计算每个方格内像素值不为o的数量,超过方格像素点一半以上的像素值不为0,则认为该方格的code值为1,否则就为O,如图4所示。
由于垂直降落的视觉标识分为四级,降落过程也因此在水平方向上划分为四个降落阶段。根据无人機在当前降落阶段的目标位置,以及相对于该级标识的相对位置,获取四维速度矢量
为了实现式(2)所示的四维速度矢量v的解耦控制,同时降低控制算法的复杂度,设计基于PID控制器的四维速度矢量分段反馈方法,系统控制框图如图6所示,图中v为v的参考值。
由于PID反馈控制方法非常经典,因此本文不再赘述。
1.3干扰自适应处理方法
在实际应用中,当阳光直射在飞机上时会在标识上会产生阴影,从而导致标识图像残缺,无法实现精确定位,如图7所示。
此外,当无人机接近降落坪时,由于地效的影响,无人机会有抖动和漂移,从而可能导致在最后降落阶段标识从相机视野消失,影响定位信息的获取。
针对上述干扰问题,设计一种可以有效克服阴影和无人机漂移的方案:通过对降落过程中的阴影进行建模并设计视觉标识阵列,即以冗余标识的方式使得当部分标识上存在阴影或无人机存在漂移时,仍能通过正常识别其他标识来获取定位信息。
无人机阴影建模如图8所示。无人机阴影主要由机身造成的矩形区域和桨叶运动构成的圆形区域组成,因而视觉标识阵列可以设计成由中心标识和前、后、左、右4个冗余标识组成,且冗余标识水平方向距离中心标识最小距离为0. 08cm,竖直方向上保证标识完全处于阴影之外或阴影之下,此时即可完整识别到标识,标识尺寸应小于0. 16m。
设“、6分别为当前识别到的标识的坐标,c为标识的相对高度,为标识的朝向角。根据三角关系以及实际标识阵列各标识朝向一致,可以得出无人机相对于目标参考位置的坐标。
2实验分析
为了验证所提方法的有效性,本文设计了无人机降落实验系统,该系统的基本配置为:大疆Matrice 210无人机一台;三级标识一套,标识ID分别为0、16,21、68;降落平台一个,尺寸为98 cm×95cm;大疆CS785平板电脑一台,运行标识识别和飞机控制程序,ROM 64 G,Android版本为5.1.1。
2.1垂直降落定位实验
为了验证基于多级视觉标识图像识别的四维定位降落方法在提高垂直降落定位精度上的优越性,下给出了无人机在静止降落甲板上的实验结果,图9为统计550次飞机降落后绘制的位置分布图,停机坪尺寸为95 cmx98 cm(横纵坐标轴范围),图中绘制的矩形为飞机降落架着陆点范围。从降落的平均位置来看,定位误差<10cm,具有较高的降落精度,且从所有降落位置构成的包络位置来看,降落均在甲板范围内。
表1给出了降落实验中的性能指标,由表中最后一列可以看出,距离上下边界越近,偏离降落目标点越远,这是由于飞机在降落过程中,理论上镜头应严格垂直向下,这样计算过程中的相机参数才能与标定参数一致,但实际降落过程中,云台在Pitch方向存在0~5度的误差,导致飞机在前后方向上存在定位误差,但该误差并不会导致降落定位失败,属于可接受范围内的。
2.2水平姿态控制实验
为了验证提出的基于分段式反馈控制的四维速度矢量控制方法在实现姿态稳定控制方面的有效性,给出了无人机在降落过程中的相对高度曲线实验结果,如图10所示。圖中有三段较为水平的部分,分别位于高度30m、17m、3m处,这是由于在分段降落过程中得到飞机相对于标识的位置后,首先水平调整飞机的位置至标识中心,然后再垂直降落至目标高度的,最后在降落高度约为1m处,无人机以固定速度直接下降,不识别标识,不进行位置调整,因此该段曲线近似直线。
图11给出了无人机从15m高度经两级标识引导精确降落三维轨迹图,X轴为无人机自身坐标系的左右方向,Y轴为前后方向,Z轴为相对高度方向,坐标单位为米。可知,主要的水平调整有两段,一段发生在开始降落后15 m高度处,一段发生在3m以下高度。第一段的水平调整到达目标点的阈值较大,同时距离目标点的偏差也较大,故到达目标点速度快。第二段水平调整到达目标点的欧氏距离阈值比较小,实际设置值为0. 08m,故调整速度慢。
由上述实验结果可知,采用基于分段式反馈控制的速度矢量的四维控制方法后,无人机在各个降落高度上均可以维持机身平稳,在不同阶段通过设置不同控制参数和阈值,可以使得降落过程在相对高度较大时降落快,而在降落接近目标点时降落慢,保持降落的安全性和精度;在无人机从一个高度降落至另一个高度的过渡过程中,无人机的速度仍可以维持稳定。
2.3自适应抗干扰实验
为了验证提出的基于视觉标识阵列的自适应抗干扰降落方法在抑制外部干扰,实现无人机自适应降落的能力,给出了无人机在阴影环境中动态车辆的降落实验结果,如图12所示。表2给出了实际使用中所提方法对降落平台倾斜角度的容忍度测试结果。实验时,降落判断条件的阈值统一设置为水平距离小于0. 08m,直接降落高度为0.6m,通过遮挡markermap的中心标识模拟阴影的情况。由表2中的降落误差可知,在有阴影时的降落误差大于无遮挡时的误差,这是由于中心标识是离降落目标点最近,视角最佳,而冗余标识需要进行位置换算得到目标位置,视角倾斜角度也更大。
3结论
针对电力巡检无人机降落问题,首先提出了基于多级视觉标识识别的四维垂直定位方法,然后以稳定无人机姿态为目标设计了基于分段反馈方法的四维速度矢量控制方法,最后采用自适应方法解决了抖动、漂移、阴影等扰动对定位精度的影响。
实验结果表明,通过综合优化无人机在垂直方向和水平方向的定位控制策略,同时结合扰动抑制设计,可以形成系统而完整的无人机降落定位方案,保证无人机的精准回收。
研究集中于单台无人机的降落定位,在实际应用中,由多台无人机组成的无人机群协同巡检与安全降落逐渐成为输电线路巡检领域的研究热点。
