轮对系统的Hopf 分岔研究1)
2021-11-10武世江张继业殷中慧
武世江 张继业 ,2) 隋 皓 殷中慧 胥 奇
* (西南交通大学牵引动力国家重点实验室,成都 610031)
† (西南交通大学力学与工程学院,成都 610031)
引言
近年来随着高速列车运行速度的提高,车辆系统的蛇行失稳问题越发突出,蛇形运动作为车辆系统的固有属性,严重影响着车辆系统的运行平稳性、乘坐舒适性和安全性[1],对车辆系统进行非线性动力学理论方面的研究,不仅可以从车辆动力学角度更加全面地了解蛇形运动,而且对车辆系统的设计与参数优化也具有非常重要的意义.
在国外研究中,True[2]用延续算法求解了非线性车辆系统中的分岔问题.Wagner[3]将非线性轮轨力分段函数拟合为关于横移量的三次方与五次方的叠加函数,并用该非线性轮轨函数求解了轮对系统的分岔图,极大地方便了理论研究非线性轮轨接触对轮对蛇形运动的影响.Zboinski 和Dusza[4-6]研究了车辆系统中悬挂参数、曲线半径、踏面和车轮名义滚动圆半径在曲线轨道上的稳定性.Kim 等[7]建立了31 个自由度的车辆系统动力学模型,通过分岔图研究发现轮对系统的线性临界速度对应亚临界Hopf 分岔,而非线性临界速度对应的是一个鞍结点.Park 等[8]利用分岔理论研究了悬挂参数与轮轨接触关系对车辆系统蛇形运动的影响,发现轮轨接触关系比悬挂参数更加影响车辆系统的蛇形运动.
在国内研究中,张卫华等[9-10]通过研究Poincaré 映射面上不动点的稳定性,得到了轨道车辆系统的周期解,并将其结果与滚动振动试验台所得结果进行对比分析,解释了相关结果出现差异的可能原因.曾京[11]针对17 个自由度的经典客车模型,应用QR 算法和黄金分割法计算了该客车系统蛇形失稳的临界速度,并用打靶法对其领域的极限环进行了求解.张继业等[12-13]利用Hurwitz 行列式得到了平衡点失稳的Hopf 分岔代数判据,极大地方便了车辆系统中寻找Hopf 分岔点的过程.黄世凯[14]在研究轮对系统陀螺效应的时候,定义了轮对系统的陀螺力贡献率,但其并没有从Hopf 分岔的角度研究陀螺效应.董浩等[15-16]建立了中国高速动车组CRH2和CRH3 的转向架和半车车辆系统动力学模型,采用范式法证明了其在简单轮轨接触关系下均存在亚临界和超临界Hopf 分岔,但并没有建立整车动力学模型,所以该结论不一定适应整车动力学模型.高学军等[17-20]对车辆系统提出了“合成分岔图”,研究发现车辆系统在拟周期运动后出现混沌现象.张波等[21-22]对轮对系统的陀螺效应进行了分析,对比了考虑陀螺效应与不考虑陀螺效应的分岔图,研究发现陀螺力不做功,具有增稳效果.Zeng 等[23]在研究轮对系统的陀螺效应时发现,轮对系统的陀螺效应关于纵向的分量会降低系统的稳定性,而关于垂向的分量有助于提高系统的稳定性,两者的综合作用可以提高车辆系统的临界速度并抑制极限环的幅值.张婷婷等[24-25]研究了单轮对系统的Hopf 分岔类型及其迁移机理,但该模型过于简单,没有考虑陀螺效应和阻尼约束.Ge 等[26]用实测踏面数据修正了轮轨非线性关系,使用MATCONT 求解了修正后的轮对系统的周期解,但对修正后的轮对系统出现的部分周期解缺少相关理论解释.
目前关于轮对系统非线性动力学的文献中,缺少同时考虑陀螺效应和退化Hopf 分岔理论的研究.本文在文献[3]的基础上,研究轮对系统中有、无陀螺效应对单参数下的Hopf 分岔类型以及双参数下的退化Hopf 分岔的影响.
1 考虑陀螺效应的轮对模型
1.1 轮对模型建立
轮对系统作为机车车辆里面最简单的系统,研究轮对系统可以从原理上简单的解释蛇形运动.如图1 所示,假设轮对系统在直线轨道上做微幅振动,轮轨之间采用kalker[27]线性蠕滑模型,建立考虑陀螺效应、刚度约束和非线性轮轨关系的轮对系统动力学模型.

图1 轮对模型图Fig.1 Wheelset model diagram
记x=(y,φ)T,主要影响轮对系统蛇形运动的横移和摇头运动方程为[3]
式中m,Iz,Iy和W分别为轮对质量、垂向转动惯量、横向转动惯量和轴重;r0,b,l和 λ 分别为名义滚动圆半径、两滚动圆跨距之半、左右悬挂距离之半和踏面等效锥度;kx和ky分别为纵向和横向刚度;f11,f22,f23和f33分别为纵向蠕 滑系数、横向蠕 滑系数、横向自旋蠕滑系数和自旋蠕滑系数;δ1和 δ2为非线性轮轨力系数;v为轮对运行速度,以上各参数取值见附录A 中表A1.
方程(1)中的矩阵G为陀螺矩阵[21],可以看出影响轮对系统陀螺效应的主要参数是横向自旋蠕滑系数和横向转动惯量.本文将动力学方程中不考虑横向自旋蠕滑系数和横向转动惯量的轮对系统称为不考虑陀螺效应的轮对系统,动力学方程中考虑横向自旋蠕滑系数和横向转动惯量的轮对系统称为考虑陀 螺效应的轮对系统.
1.2 轮对系统在Hopf 分岔点处的线性临界速度表达式推导

式中p1,p2,p3,f1,f2,g,s和c的具体表达式见附录B 中式(B1)~ 式(B8).
方程(2)的线性部分对应的特征方程如下

根据Hopf 分岔代数判据[12]可知,方程(4)的4 个特征值中存在一对纯虚根且其余两个根的实部均为负数的条件为

其中 Δ3为Hurwitz 行列式.
由方程(5) 可知,当轮对系统的参数满足ai>0 (i=0,1,···,4) 时,令 Δ3=0可得关于轮对系统运行速度v的一元六次方程如下

其中b0,b1,b2和b3的具体表达式参见附录B 中式(B9)~ 式(B12).
令v2=d,由方程(6)可得关于x的一元三次方程如下

在Hopf 分岔点处,轮对系统有且仅有一个线性临界速度(正实数),故方程(7)中的一元三次方程的根中必须有且仅有一个正实根,根据文献[28]中对一元三次方程根的讨论,令可得考虑陀螺效应的轮对系统,在Hopf 分岔点处的线性临界速度表达式为

其中

不考虑陀螺效应的轮对系统,即横向自旋蠕滑系数和横向转动惯量均为零时,方程(7)中的系数b0和b1变为零,b2和b3也会分别简 化为b22和b33,b22和b33的表达式见附录B 中式(B13)和式(B14),方程(7)简化为一元一次方程

求得不考虑陀螺效应的轮对系统在Hopf 分岔点处的线性临界速度表达式为

其与文献[24]中是一样的.
取纵向刚度为4 MN/m,其他参数取值见附录A 中表A1,将参数值代入本文推导的考虑陀螺效应的轮对系统线性临界速度解析表达式(8)~ 式(11)与不考虑陀螺效应的轮对系统线性临界速度解析表达式(13),求得考虑陀螺效应的轮对系统在Hopf 分岔点处的线性临界速度值为140.5364 m/s,不考虑陀螺效应的轮对系统在Hopf 分岔点处的线性临界速度值为135.4532 m/s.
同理取纵向刚度kx为4 MN/m,其他参数取值见附录A 中表A1,对方程(2)的线性部分使用根轨迹法[11]求解Hopf 分岔点处轮对系统的线性临界速度,即设初速度为v0,步长为 Δv和特征值控制精为ep.令v=v0,计算速度v对应的方程(2) 中J(v)矩阵的特征值.然后对每一个速度v对应下的所有特征值的实部取绝对值,找出每一个速度v对应的特征值实部绝对值的最大值 |Rmax|,若 |Rmax|≤ep,则此时的速度就是轮对系统在Hopf 分岔点处的线性临界速度.若|Rmax|>ep,此 时 当Rmax<0 时,则 设v=v0+Δv,当Rmax>0 时,则v=v0−Δv,重复以上计算过程,直到得到满足控制精度ep的轮对系统Hopf 分岔线性速度值为止.最后求得考虑陀螺效应的轮对系统在Hopf 分岔点处的线性临界速度值为140.5364 m/s,不考虑陀螺效应的轮对在Hopf 分岔点处的线性临界速度值为135.4532 m/s.
该结果与本文推导的考虑陀螺效应的轮对系统线性临界速度解析表达式(8)~ 式(11)与不考虑陀螺效应的轮对系统线性临界速度解析表达式(13)的结果是一样的.
1.3 轮对系统的陀螺效应参数分析
由方程(1)中的陀螺矩阵G可知,影响轮对系统陀螺效应的主要参数为横向自旋蠕滑系数和横向转动惯量,假设横向自旋蠕滑系数和横向转动惯量的数值变化不引起轮对系统其他参数的变化.
取纵向刚度值为4 MN/m,横向自旋蠕滑系数分别取0.01 MN,0.13 MN 与0.2 MN,横向转动惯量的值从50 k g·m2取到150 k g·m2,其他参数取附录A 中表A1,将其代入式(8)~ 式(11)中,得到考虑陀螺效应的轮对系统中,线性临界速度与横向转动惯量的关系如图2 所示.
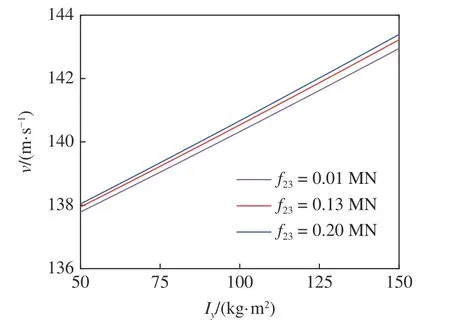
图2 轮对系统线性临界速度与横向转动惯量的关系Fig.2 The relationship between the linear critical speed of the wheelset system and the lateral moment of inertia
取纵向刚度为4 MN/m,横向转动惯量分别取80 k g·m2,100 k g·m2与120 k g·m2,横向自旋蠕滑系数的值从0.001 MN 取到0.25 MN,其他参数取附录A 中表A1,将其代入式(8)~ 式(11)中,得到考虑陀螺效应的轮对系统中,线性临界速度与横向自旋蠕滑系数的关系如图3 所示.
图2 与图3 中Iy为轮对系统的横向转动惯量,v为轮对系统的运行速度,f23为轮对系统的横向自旋蠕滑系数.由图2 可知,在同一横向自旋蠕滑系数下,轮对系统的线性临界速度随着横向转动惯量的增大而增大,该变化趋势比较明显.在同一横向转动惯量下,横向自旋蠕滑系数分别为0.01 MN,0.13 MN与0.2 MN 对应的轮对系统的线性临界速度依次增大,该变化趋势不太明显.由图3 可知,在同一横向转动惯量下,轮对系统的线性临界速度随着横向自旋蠕滑系数的增大而增大,该变化趋势不太明显.在同一横向自旋蠕滑系数下,横向转动惯量分别为80 k g·m2,100 k g·m2与120 k g·m2对应的轮对系统的线性临界速度依次增大,该变化趋势比较明显.
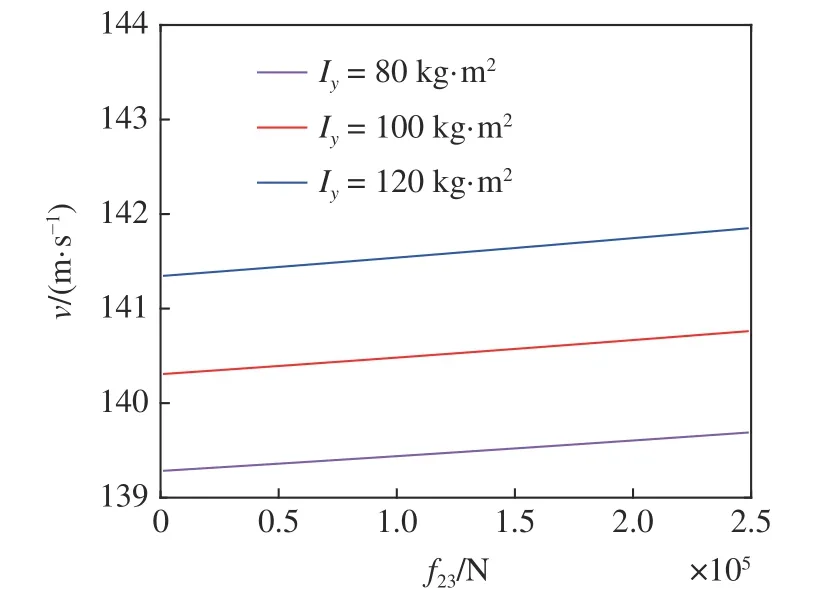
图3 轮对系统的线性临界速度与横向自旋蠕滑系数关系Fig.3 The relationship between the linear critical speed of the wheelset system and the lateral spin-slip coefficient
对比图2 与图3 可知,横向转动惯量在轮对系统陀螺效应中起主导作用,横向自旋蠕滑系数起次要作用.
2 轮对系统第一、第二Lyapunov 系数的求解
为更好地研究轮对系统在Hopf 分岔点处的运动形式,采用分岔理论中的投影法[29-30]求解轮对系统的第一、第二Lyapunov 系数,从而方便研究轮对系统在单参数下的Hopf 分岔类型与双参数下的退化Hopf 分岔类型.
2.1 轮对系统第一Lyapunov 系数求解
在轮对系统的Hopf 分岔点处,即v=vcr时,方程(2) 中的矩阵J(v)的特征值中存在一对纯虚根±ω0i 与两个具有负实部的根,设矩阵J(v)的特征值为纯虚根时对应的特征向量为q=[x1,x2,x3,x4]T,满足J(v)q=iω0q,其中

在轮对系统的Hopf 分岔点处,即v=vcr时,方程(2)中的矩阵J(v) 的转置矩阵为JT(v),该转置矩阵的特征值中存在一对纯虚根 ± iω0和两个具有负实部的根,设矩阵JT(v)的特征值为纯虚根时对应的特征向量为p=[x11,x22,x33,x44]T,满足JT(v)p=−iω0p,其中
从方程(1)中可知非线性轮轨力为关于横移量的三次方和五次方的叠加,根据投影法[29-30]求解可得

当系统在平衡点发生Hopf 分岔时,若第一Lyapunov 系数大于零,系统发生亚临界Hopf 分岔.若第一Lyapunov 系数小于零,系统发生超临界Hopf 分岔.若第一Lyapunov 系数等于零,系统发生退化的Hopf 分岔.故可通过计算轮对系统的第一Lyapunov 系数判断系统发生的Hopf 分岔类型.
2.2 轮对系统第二Lyapunov 系数求解
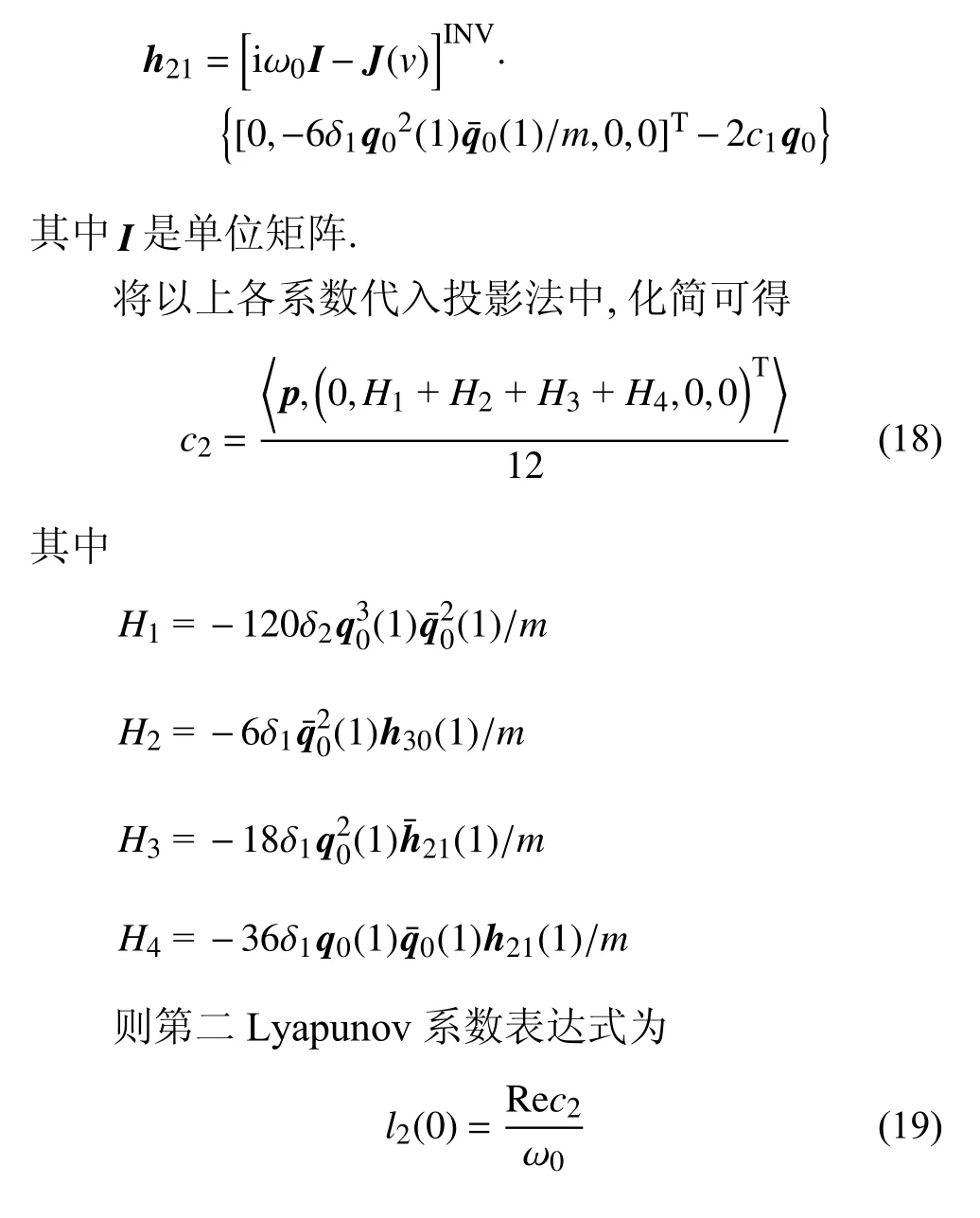
为研究第一Lyapunov 系数等于零时轮对系统在退化Hopf 分岔点附近的Bautin 分岔形式,根据投影法[29-30]求解轮对系统的第二Lyapunov 系数,其中轮对系统对应的投影法中各系数分别如下
3 轮对系统的分岔图
3.1 采用打靶法求解轮对系统分岔图
采用打靶法[11]求解轮对系统的分岔图,其原理为假设极限环周期为T,满足Y(t+T)=Y(t),令t=Tz,则方程(2)可以被表示为

方程(20)满足边界条件Y(1)=Y(0),对方程(20)在区间[0,1]内积分可以得到Y(1)=G(Y,T,v),使得其满足

通过使用得到的轮对系统在Hopf 分岔点处的线性临界速度表达式(8)~ 式(11)与式(13),参数值代入附录A 中表A1,计算轮对系统Hopf 分岔点处的线性临界速度vcr.
取初值分别为T0=2π/ω0,v0=vcr,y=y0,=0,φ=0 和=0,其中,y0为轮对横移量初始微小扰动,使用Newton−Raphson 迭代法[31]求解方程(21),每次使用Newton−Raphson 迭代法求解方程(21)的过程中,都要用变步长欧拉法[31]在区间[0,1]内积分求解方程(21),并判断F(Y,T,v)的范数是否满足控制精度,若满足则得到轮对系统的极限环解(轮对横移量周期解),然后选取下一极限环的初值为y=y0+h(h为步长)与=0,其他值取前一极限环的值,重复循环计算最终可以得到轮对系统的分岔图.
令D=∂G/∂Y,当矩阵D的特征值最大模小于1 时,极限环稳定,否则不稳定.
为对比考虑陀螺效应与不考虑陀螺效应对轮对系统分岔图的影响,取轮对系统的纵向刚度分别为4.0 MN/m,5.0 MN/m,5.5 MN/m,6.0 MN/m,6.5 MN/m 与7.0 MN/m,其他参数值取附录A 中表A1,采用打靶法[11]求解出不同纵向刚度值下不考虑陀螺效应与考虑陀螺效应的轮对系统分岔图如下图4与图5 所示.

图4 不同纵向刚度下不考虑陀螺效应的轮对系统分岔图Fig.4 The bifurcation diagram of wheelset system without considering the gyroscopic action under different longitudinal stiffness
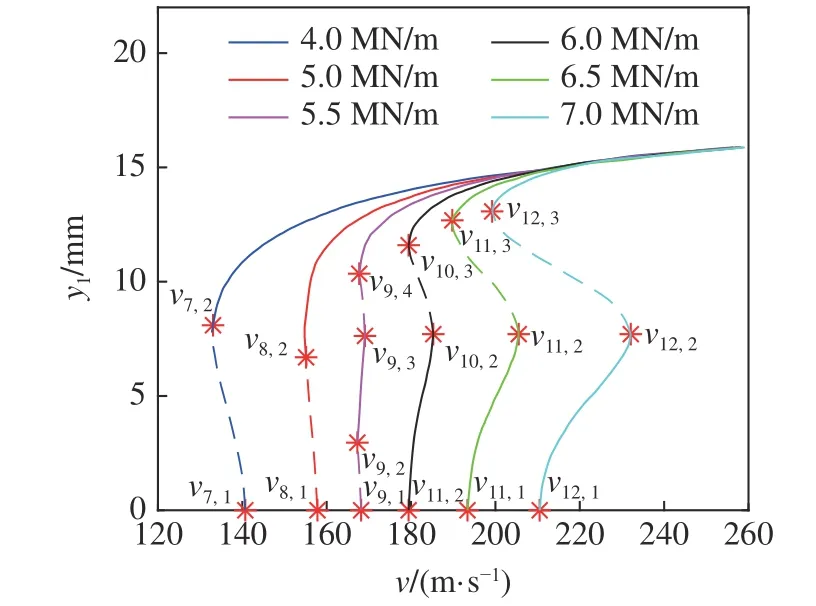
图5 不同纵向刚度下考虑陀螺效应的轮对系统分岔图Fig.5 The bifurcation diagram of wheelset system considering the gyroscopic action under different longitudinal stiffness
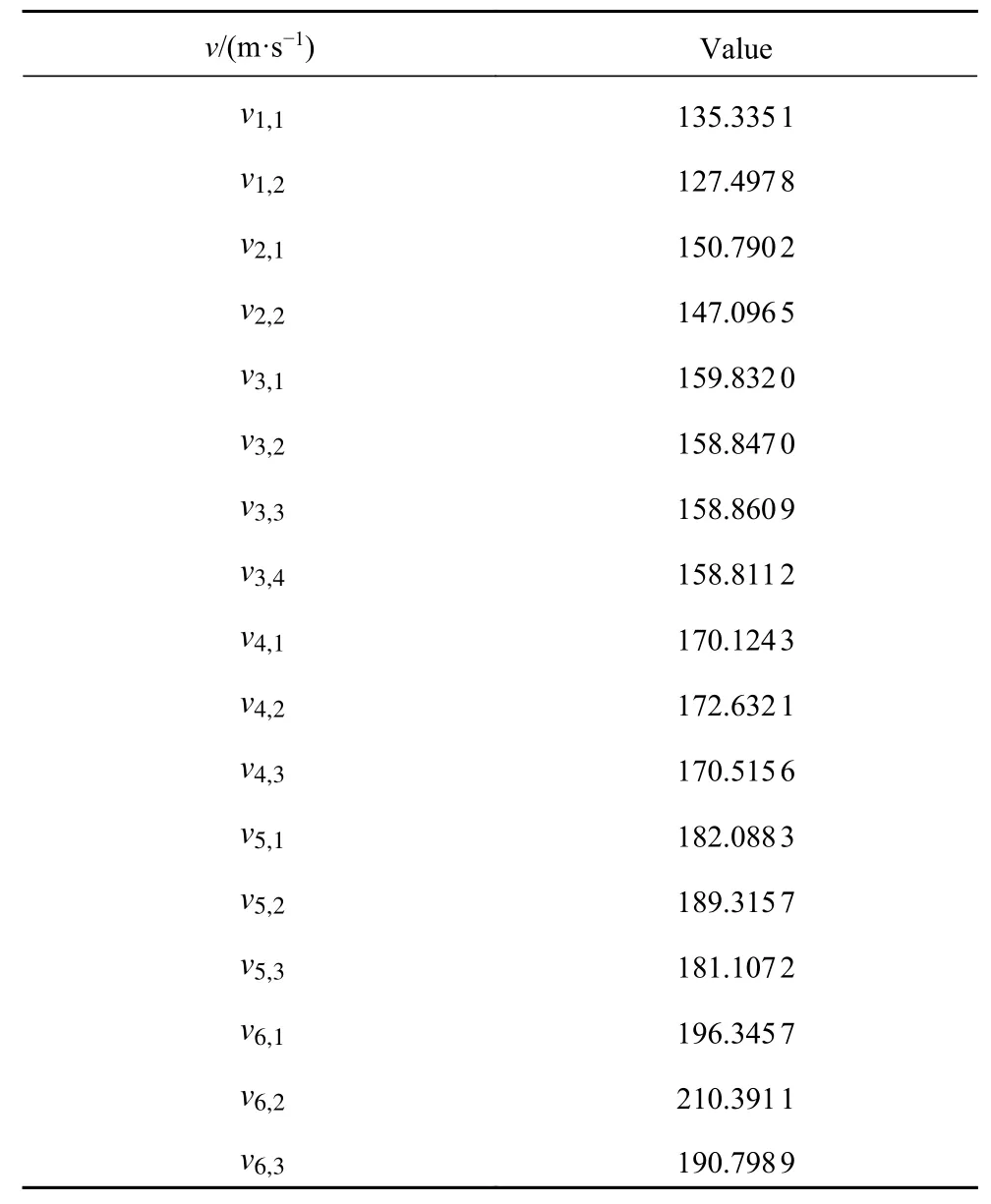
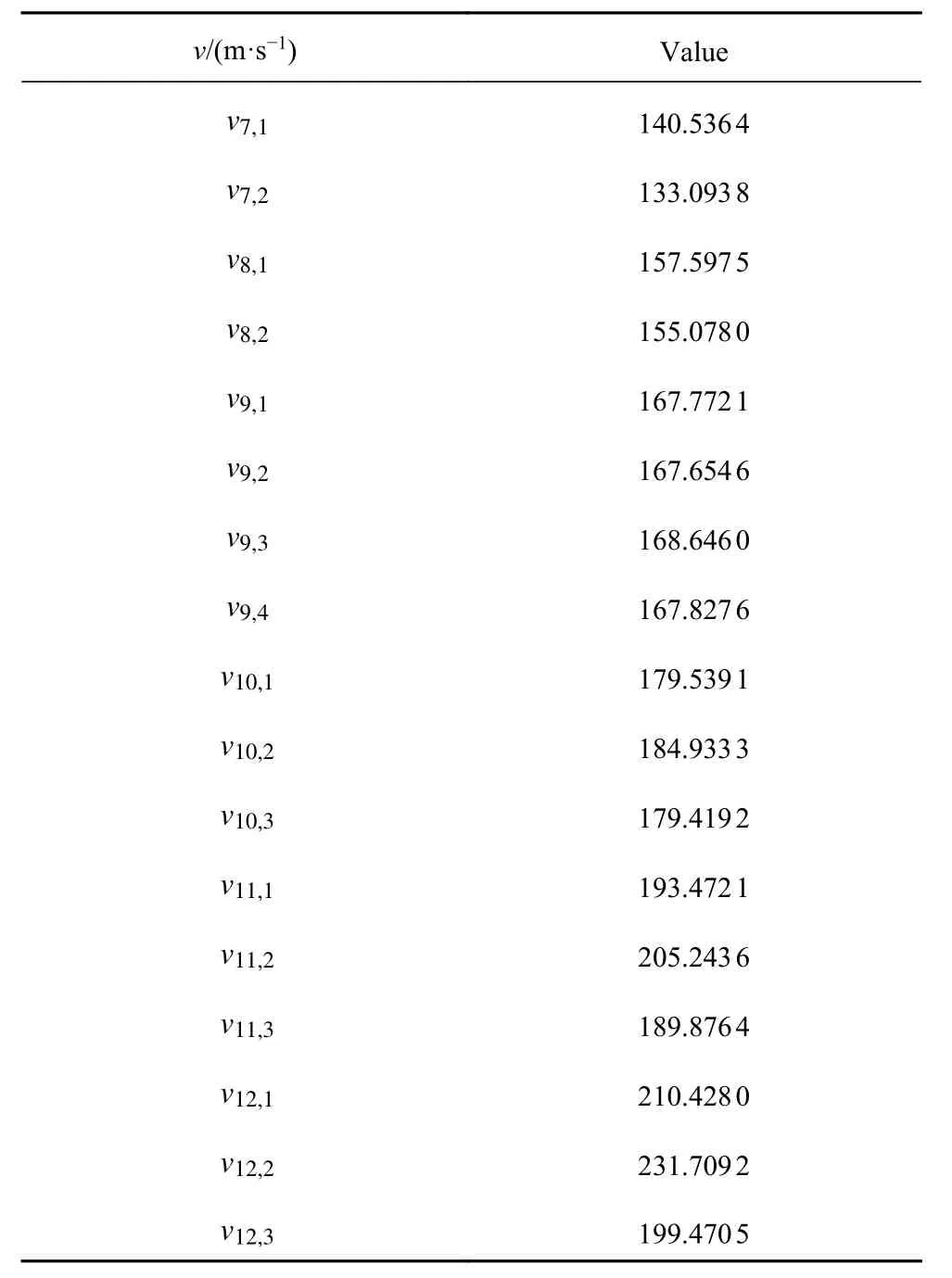
图中y1表示轮对系统的横移量,v表示轮对系统的运行速度,实线表示稳定的极限环,虚线表示不稳定极限环.vi,j(i=1,2,···,12;j=1)为轮对系统的线性临界速度,其余的vi,j为轮对系统的非线性临界速度,各值见附录A 中表A2 与表A3.
由方程(17)可得,图4 中不考虑陀螺效应的轮对系统,纵向刚度依次取4.0 MN/m,5.0 MN/m,5.5 MN/m,6.0 MN/m,6.5 MN/m 与7.0 MN/m 时,分别对应的第一Lyapunov 系数依次为0.051 5,0.0238,0.0108,−0.0024,−0.0168 与−0.033 6.图5 中考虑陀螺效应的轮对系统,纵向刚度依次取4.0 MN/m,5.0 MN/m,5.5 MN/m,6.0 MN/m,6.5 MN/m 与7.0 MN/m 时,分别对应的第一Lyapunov系 数 依 次 为0.045 2,0.017 2,0.003 7,−0.010 3,−0.0258 与−0.044 2.可知当纵向刚度为4.0 MN/m,5.0 MN/m,5.5 MN/m 时,考虑陀螺效应与不考虑陀螺效应的轮对系统第一Lyapunov 系数均大于零,即轮对系统在Hopf 分岔点处发生亚临界Hopf 分岔.当纵向刚度为6.0 MN/m,6.5 MN/m,7.0 MN/m 时,考虑陀螺效应与不考虑陀螺效应的轮对系统第一Lyapunov 系数均小于零,即轮对系统在Hopf 分岔点处发生超临界Hopf 分岔.
图4 与图5 对比可知,轮对系统的纵向刚度依次取4.0 MN/m,5.0 MN/m,5.5 MN/m,6.0 MN/m,6.5 MN/m 与7.0 MN/m 时,考虑陀螺效应与不考虑陀螺效应的轮对系统均经历了从亚临界Hopf 分岔到超临界Hopf 分岔的变化,在轮对系统中,当纵向刚度值与其他各参数值均已知时,考虑陀螺效应的线性临界速度和非线性临界速度均高于不考虑陀螺效应的线性临界速度和非线性临界速度,即在同一纵向刚度值下,陀螺效应既可以提高轮对系统的线性临界速度,又可以提高轮对系统的非线性临界速度,陀螺效应对轮对系统具有增稳效果.
3.2 轮对系统在退化Hopf 分岔点处的分岔图
由分岔理论[29-30]可知,若在Hopf 分岔点处系统满足第一Lyapunov 系数为零,系统发生退化Hopf分岔.
针对轮对系统,若考虑陀螺效应,轮对横向转动惯量取100 k g·m2,横向自旋蠕滑系数取0.13 MN,其他参数取值见附录A 中表A1,根据第一Lyapunov系数表达式(17)与Hopf 分岔点处的线性临界速度表达式(8)~ 式(11),得到考虑陀螺效应的轮对系统在退化Hopf 分岔点处的纵向刚度与轮对线性临界速度分别为kc1与vc1

针对轮对系统,若不考虑陀螺效应,轮对系统的横向转动惯量取0 k g·m2,横向自旋蠕滑系数取0 MN,其他参数取值见附录A 中表A1,根据第一Lyapunov 系数表达式(17)与Hopf 分岔点处的线性临界速度表达式(13),得到不考虑陀螺效应的轮对系统在退化Hopf 分岔点处的纵向刚度与轮对线性临界速度分别为kc2与vc2

采用打靶法[11]分别计算考虑陀螺效应与不考虑陀螺效应的轮对系统在退化Hopf 分岔点处的分岔图如下图6 所示.

图6 轮对系统退化Hopf 分岔图Fig.6 Degenerate Hopf bifurcation diagram of the wheelset system
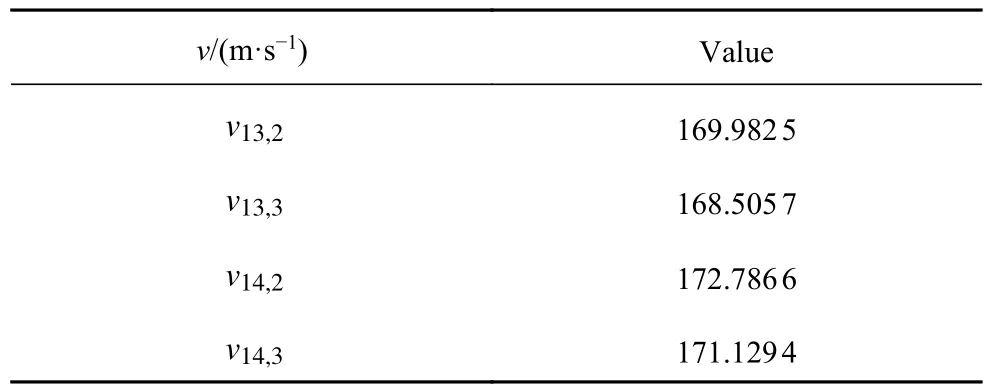
图中y1表示轮对系统的横移量,v表示轮对系统的运行速度,实线表示稳定的极限环,虚线表示不稳定极限环.v13,1与v14,1为轮对系统的线性临界速度,且v13,1=vc1,v14,1=vc2,vi,j(i=13,14;j=2,3)为轮对系统的非线性临界速度,其值参见附录A 中表A4.
由图6 可知,考虑陀螺效应与不考虑陀螺效应的轮对系统在各自的退化Hopf 分岔点处,考虑陀螺效应的线性临界速度与非线性临界速度值均高于不考虑陀螺效应的轮对系统.
4 轮对系统的退化Hopf 分岔形式
4.1 轮对系统在退化Hopf 分岔点处的Bautin 分岔拓扑形式
当第一Lyapunov 系数为零时,轮对系统发生退化Hopf 分岔.
根据文献[30]中对于退化Hopf 分岔的讨论可知,两参数平面系统经过一系列时间尺度变换最终可化简为
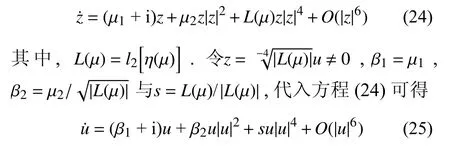
当L(µ)>0,即退化H o p f 分岔点处的第二Lyapunov 系数大于零时,s=1 .当L(µ)<0,即退化Hopf 分岔点处的第二Lyapunov 系数小于零时,s=−1.
由式(19)、式(22)与式(23)可得,考虑陀螺效应和不考虑陀螺效应的轮对系统在退化Hopf 分岔点处的第二Lyapunov 系数分别为−0.01478 与−0.01463,均小于零,结合方程(25)可知,有、无陀螺效应的轮对系统对应的Bautin 分岔[30]的形式均为
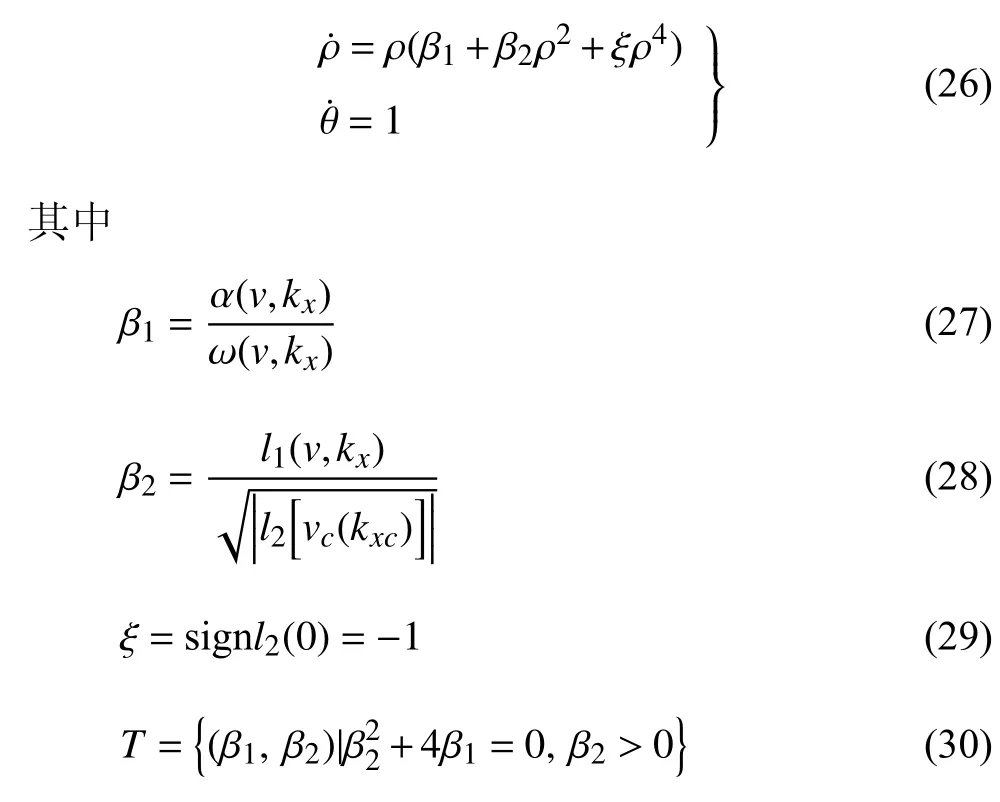
对应的Bautin 分岔见图7,其中H−和H+分别对应Hopf 分岔的第一Lyapunov 系数小于0 和第一Lyapunov 系数大于0.
在图7 中绕着Bautin 点逆时针方向考察,从区域①中的点开始,在该区域里面系统有单个稳定平衡点而没有极限环.从区域①到区域②穿过Hopf 分岔边界H−,出现唯一稳定极限环.当穿过Hopf 分岔边界H+进入区域③时,该稳定的极限环依然存在,此时平衡点恢复它的稳定性,同时在第一个环内部额外产生了一个不稳定极限环,两个具有相反稳定性的环在区域③中存在并在曲线T上相遇消失而留下单个稳定平衡点,这就走完了一圈.

图7 Bautin 分岔图(ξ=−1)Fig.7 Bautin bifurcation diagram (ξ=−1)
在图7 中每次穿越 β1轴时系统的第一Lyapunov 系数都会出现变号,若逆时针方向穿越 β1负半轴,系统从亚临界Hopf 分岔转变为超临界Hopf 分岔,若逆时针穿越 β1正半轴,系统从超临界Hopf 分岔转变为亚临界Hopf 分岔.这就是系统在双参数下,由亚临界Hopf 分岔到超临界Hopf 分岔,再从超临 界Hopf 分岔到亚临界Hopf 分岔的迁移转化机理.
4.2 轮对系统考虑陀螺效应与不考虑陀螺效应时在退化Hopf 分岔点附近的Bautin 分岔拓扑图对比
通过式(26)~ 式(30)中的坐标变化,得到考虑陀螺效应的轮对系统在运行速度与纵向刚度坐标系下的Bautin 分岔拓扑图如图8 所示.

图8 轮对系统考虑陀螺效应时的Bautin 分岔拓扑图Fig.8 Bautin bifurcation topology diagram of wheelset system when considering gyroscopic action
系统中若存在稳定的周期解,其相图必然存在,在图8 的区域①中取一个点(170 m/s,5.8 MN/m),在区域②中取一个点(170 m/s,5.2 MN/m),在区域③中取一个点(160 m/s,5.13 MN/m),在T曲线上取一个点(160 m/s,5544590 N/m),分别得到对应的相图如图9~ 图12 所示.

图9 图8 中区域①对应的相图Fig.9 Phase diagram corresponding to area ①in Fig 8
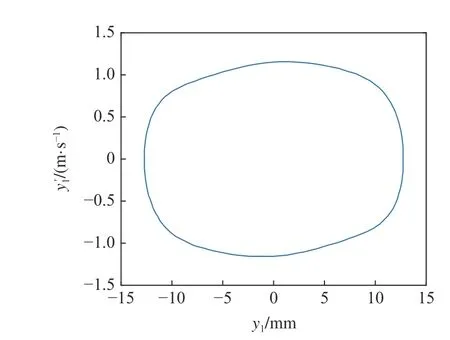
图10 图8 中区域②对应的相图Fig.10 Phase diagram corresponding to area ② in Fig 8
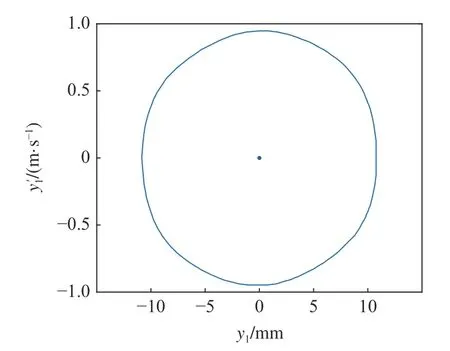
图11 图8 中区域③对应的相图Fig.11 Phase diagram corresponding to area ③in Fig 8

图12 图8 中T 区域对应的相图Fig.12 Phase diagram corresponding to the T region in Fig 8
通过式(26)~ 式(30)中的坐标变化,得到不考虑陀螺效应的轮对系统在运行速度与纵向刚度坐标系下的Bautin 分岔拓扑图如图13 所示.
在图13 的区域①中取点(170 m/s,6.5 MN/m),在区域②中取点(170 m/s,5.5 MN/m),在区域③中取点(160 m/s,5.54 MN/m),在T曲线上取点(160.3 m/s,5558921 N/m),分别得到对应的相图如图14~图17 所示.

图13 轮对系统不考虑陀螺效应时的Bautin 分岔拓扑图Fig.13 Bautin bifurcation topology diagram of wheelset system without considering gyroscopic action

图14 图9 中区域①对应的相图Fig.14 Phase diagram corresponding to area ①in Fig 9

图15 图9 中区域②对应的相图Fig.15 Phase diagram corresponding to area ② in Fig 9

图16 图9 中区域③对应的相图Fig.16 Phase diagram corresponding to area ③in Fig 9

图17 图9 中T 区域对应的相图Fig.17 Phase diagram corresponding to the T region in Fig 9
图8 与图13 分别展示了考虑陀螺效应与不考虑陀螺效应的轮对系统在退化Hopf 分岔点附近,依靠双参数(纵向速度和纵向刚度)从亚临界Hopf 分岔到超临界Hopf 分岔,再从超临界Hopf 分岔到亚临界Hopf 分岔的转化过程.
由图9~ 图12 可知,考虑陀螺效应的轮对系统,其在退化Hopf 分岔点附近的Bautin 分岔拓扑图的区域①中的点具有单个稳定平衡点.区域②中的点具有单个稳定极限环.区域③中的点具有单个稳定极限环和单个稳定平衡点,T曲线上只有单个稳定平衡点.该结论与图7 中的理论结果是一致的.
由图14~ 图17 可知,不考虑陀螺效应的轮对系统,其在退化Hopf 分岔点附近的Bautin 分岔拓扑图的区域①中的点具有单个稳定平衡点.区域②中的点具有单个稳定极限环.区域③中的点具有单个稳定极限环和单个稳定平衡点,T曲线上只有单个稳定平衡点.该结论与图7 中的理论结果是一致的.
由图8~ 图17 可知,陀螺效应将改变轮对系统的退化Hopf 分岔点,但对于在退化Hopf 分岔点附近的Bautin 分岔形式影响不大.
5 结论
本文基于Hopf 分岔代数判据、分岔理论和打靶法,分别得到考虑陀螺效应与不考虑陀螺效的轮对系统Hopf 分岔点解析表达式、在不同纵向刚度下的分岔图和在退化Hopf 分岔点附近的Bautin 分岔拓扑图.发现影响轮对系统陀螺效应的主要参数是轮对系统的横向转动惯量,次要参数是轮对系统的横向自旋蠕滑系数.陀螺效应不仅可以提高轮对系统的线性临界速度,也可以提高轮对系统的非线性临界速度,即陀螺效应对轮对系统的运动稳定性具有增稳作用.陀螺效应会改变轮对系统的退化Hopf 分岔点,但对退化Hopf 分岔点附近的Bautin分岔形式影响不大.
附录A

附表 A1 轮对参数表Table A1 Wheelset parameter list
附表 A2 图4 中各速度值Table A2 Values of each speed in Fig.4
附表 A3 图5 中各速度值Table A3 Values of each speed in Fig.5
附表 A4 图6 中各速度值Table A4 Values of each speed in Fig.6
附录B