LLN中基于移动节点邻居探测的高效路由寻路算法
2021-11-10姚玉坤李维政周佳琦
姚玉坤, 何 亮, 任 智, 李维政, 周佳琦
(1.重庆邮电大学通信与信息工程学院, 重庆 400065;2.重庆邮电大学移动通信技术重庆市重点实验室, 重庆 400065)
0 引 言
无线传感器网络(wireless sensor networks,WSNs)是由大量自身内存、处理能力、电池能量等资源受限的无线传感器设备以自组织和多跳的方式构成的无线网络,不仅能够满足特定情况下的网络需求而且成本较低。其目的是协作地采集、感知和处理网络覆盖范围内其他节点的信息。但传统的无线自组织网络路由协议如按需平面距离向量路由协议[1]和最优链路状态路由协议[2]的能量消耗较大,均不能有效应用于低功耗有损网络(low power lossy networks,LLN)。为了克服上述问题,国际互联网工程任务组在2012年提出一种基于IPV6的LLN路由协议(routing protocol for LLN,RPL)[3-5]。
标准RPL是一种支持点到点、点到多点和多点到点的网络拓扑为树形的路由协议。其广泛应用于医疗护理[6]、环境监测[7]和农业领域。然而标准RPL并不适用无线传感器这种具有移动性的场景。
无线传感器具有移动性场景,按不同移速分为3类:一般来说,移动速度处于正常人类行走速度即0.5~2 m/s属于低速场景。移动速度处于2~10 m/s属于中速场景。移动速度大于10 m/s属于高速场景。例如,低速场景下的矿井工人的健康状况监控[8]、中速场景下的无人机野外信息采集、高速场景下的移动车辆间信息交互[9]。在各种不同移速的场景下,移动传感器与其他静态传感器之间的通信链路的切换次数增多,移动传感器的能量消耗增大,丢包率增加。这些问题逐渐成为了近年来的研究热点[10-12]。但现有国内外大多文献均在低速场景下对RPL进行增强性研究。这些文献提出的算法均不能很好的适用于中速或高速场景下。
文献[13]提出一种支持RPL中节点随机迁移的移动感知节能父节点选择算法。该算法结合多种路由度量选择下一个父节点(next parent node,NPN),但在选择NPN时并未考虑到节点剩余能量。文献[14]提出一种在LLN中静态节点(static node,SN)和移动节点(mobile node,MN)使用多种路由度量来选择NPN。但该算法端到端时延较大,影响了协议的性能。文献[15]提出一种增强物联网移动性(boosting mobility in the internet of things,MRPL)的协议。该协议通过MN周期性接收控制消息计算出接收信号强度指标(indicator of received signal strength,RSSI),依靠自身处理移动性带来的问题。但会消耗大量MN的能量。文献[16]提出依靠父节点为MN进行移动检测。MN根据预期传输数、RSSI、剩余能量等指标选择新的父节点,但在移动速度过快时仍需依靠MN主动广播面向目的地有向无循环图请求消息(destination oriented directed acyclic graph information solicitation,DIS)去寻找NPN。文献[17]提出一种使用跳数度量来减少传递的控制消息的数量。MN在选择父节点时,还使用跳数选择一个可以与之保持较长时间连接的父节点,这将增加网络的稳定性。但当有多个MN连接到同一父节点时,将加剧父节点的能量消耗。文献[18]提出一种物联网中的能量和移动性感知路由协议(energy and mobility aware routing for the internet of mobile things,EMA-RPL),其是一种将移动性处理过程委托给其父节点的协议。减少了MN的能源消耗,并提供了切换父节点时的无缝连接。但中速场景下存在寻路不及时和路由度量单一的问题。文献[19]提出基于叶子节点计数和RSSI的父节点预测算法。该算法能够有效均衡网络负载和减少MN的能耗,但仍存在路由度量单一的问题。文献[20]提出一种基于邻居变异性的跨层移动性支持算法,该算法通过MN监听邻居节点的RSSI去测量节点的可变性邻域,实现了MN切换父节点的无缝连接,但MN能耗较大,缩短了MN的网络寿命。
通过对以上协议的研究与分析,现有文献的仿真场景均未考虑到无线传感器节点之间存在障碍物的情况,且在中速场景下均存在MN寻路不及时、能耗较大和路由度量单一等问题。由此,本文提出LLN中基于移动节点邻居探测的高效路由寻路算法。该算法通过基于障碍物的信道传输模型计算出安全阈值(safe threshold,ST)和危险阈值(risk threshold,RT),使得MN可以提前寻路,有效提高了MN的数据传输成功率。同时提出基于变异系数的父本选择目标函数和基于邻居节点的监听预选机制,减少了MN切换父节点的次数和能量消耗。
1 网络模型
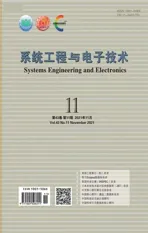
如图1所示,所有无线传感器节点部署在一个云形监测区域内。MN将采集的信息通过父节点向上传输,最终汇聚到根节点。在LLN网络中,部署一个根节点,多个SN、MN随机移动,但始终在部署的SN的附近。
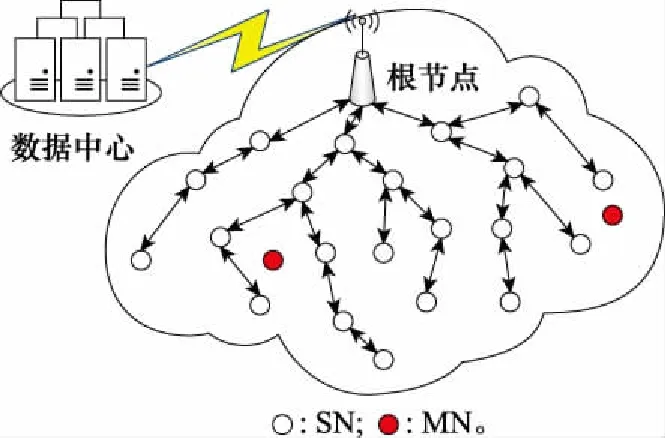
图1 网络模型
(1)根节点:根节点可以被认为是中央处理器,处理从各个节点发送回来的数据。可以认为该节点的能量可以得到及时补充。而SN和MN的能量均不能补充,由电池提供能量。
(2)MN:由于MN的随机移动性且该节点能量有限,必须在保证数据传输的同时,尽可能减少该节点的能量消耗。因此,在本文的算法中,MN只能是叶子节点。即不能作为任何类型节点的父节点来中继数据,只能向上传输采集的数据。MN作为叶子节点的另一个好处是避免MN切换父节点导致的路由变化,确保路由稳定性。
(3)SN:SN的主要任务是采集和处理周围可感知对象的信息,并中继MN采集的数据,以上传到根节点。因此,有些静态节点SN可能会成为MN的当前父节点(current parent node,CPN)。
(4)每一个SN都有一个RSSI阈值。该阈值等于后文提到的RT。用于判断MN是否还能正常传输数据。在网络模型中,除根节点以外的所有无线传感器节点具有相同的性能和参数配置。
2 NDM-RPL算法
在现有文献对RPL移动性支持研究的基础上,本文提出了NDM-RPL路由算法,该算法的创新点如下。
(1)提出基于障碍物的链路质量检测机制。该机制通过基于障碍物的信道传输模型为静态节点SN计算出安全阈值ST和危险阈值RT。当RSSI值小于ST时,MN便可以提前开始寻路;当RSSI小于RT时,MN会停止发送数据,降低了MN的丢包率。
(2)针对移动节点提出一种基于变异系数的父本选择目标函数。NDM-RPL协议中MN选择NPN综合考虑了备选CPN的网络深度、当前连接的子节点数、节点剩余能量和与移动性相关的变异系数,能够有效均衡网络负载和保证移动节点网络连接稳定性。
(3)提出基于邻居节点的监听预选机制。MN的邻居节点会监听MN发向其CPN的数据包并测得RSSI。通过RSSI平均值大小判断是否远离MN。如果靠近,则会根据基于变异系数的父本选择目标函数计算出综合路由度量值(rank值)并向MN或其CPN回复一个带有rank值的DIS消息。解决了备选CPN集冗余的问题,并减少了MN的控制开销。
2.1 基于障碍物的链路质量检测机制
为了解决中速场景下MN移动速度过快导致切换CPN不及时和存在障碍物时信号衰减增大的问题,本文提出为无线传感器节点预设两个通信阈值,即ST和RT。为了得到合理的通信阈值,必须考虑包接收率与接收信号强度RSSI的关系。该算法使用基于障碍物的信道传输模型[21]如式(1)所示来计算得到合理的ST和RT。
(1)
式中:PR为接收信号强度,即RSSI值;PT为发射功率。A为1 m处接收信号强度;n为路径损耗指数因子;dw为无障碍物时通信距离;dm为有障碍物通信距离;S为经验指数;C为与频率、通信距离相关的指数。
为了便于计算ST和RT,定义Dw表示无障碍物时无线传感器节点的最大通信半径,Dm表示有障碍物时无线传感器节点的最大通信半径。
假如无线传感器有无障碍物的最大通信半径是已知的。为了降低数据包丢失的概率,当信号发射端与信号接收端之间存在障碍物时,利用式(1)求出dm=Dm时的PR作为危险阈值。同时令dw=Dm代入式(1)求出PR作为安全阈值。
如图2所示,假设lac属于有障碍物的最大通信距离,lab属于无障碍物通信距离,且lac=lab。c点处的RSSI即为危险阈值。b点处的RSSI即为安全阈值ST。b、c两点处的RSSI值之差即为由障碍物导致的信号衰减值。有障碍物的信号衰减比无障碍物的信号衰减强。由障碍物导致的信号衰减越强,安全阈值越大,MN便能及时开始寻找NPN。
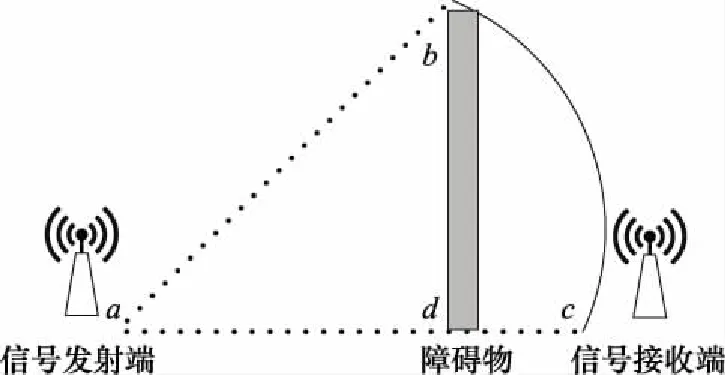
图2 链路质量区分示意图
以图3为例,在T1时刻,MN在当前父节点CPN的安全阈值ST内,意味着MN与CPN之间有很好的链路质量,可以进行可靠通信。在T2时刻,当CPN检测到MN处于安全阈值和危险阈值之间,两者仍然可以进行较为可靠的通信。但MN的移动带来了不确定性,MN可能快要移出CPN的可靠通信范围。
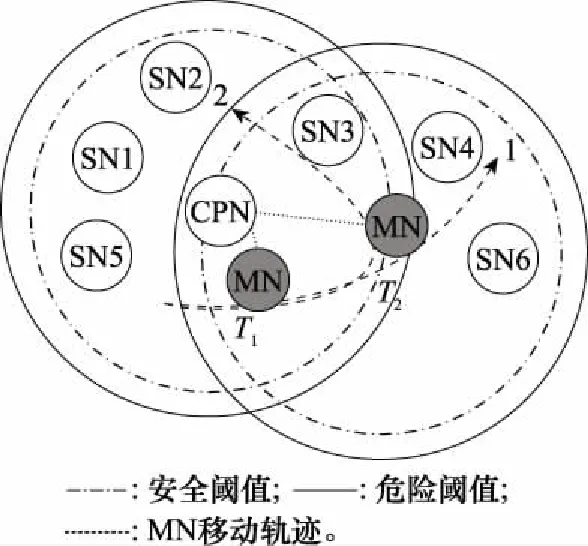
图3 MN的链路质量检测
基于障碍物的链路质量检测机制具体过程如下。
步骤 1CPN通过从MN接收数据包测得RSSI值,每测得一个RSSI值就和ST比较大小。若ST>RSSI,则进入步骤2。反之,继续执行步骤1。
步骤 2CPN立即单播给MN一个Flag为4的DIS消息,让MN提前开始寻找NPN,然后执行步骤3。
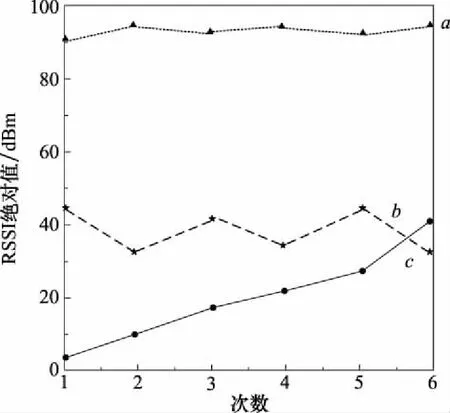
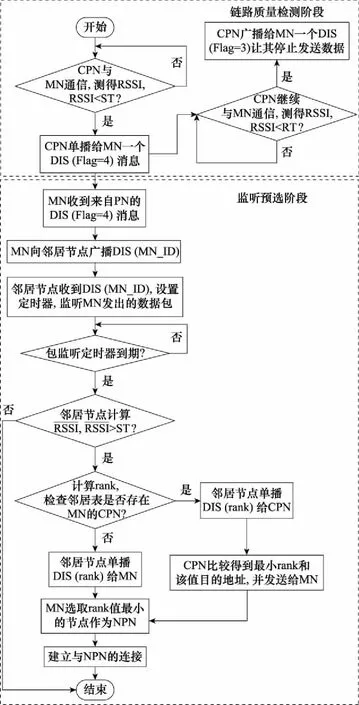
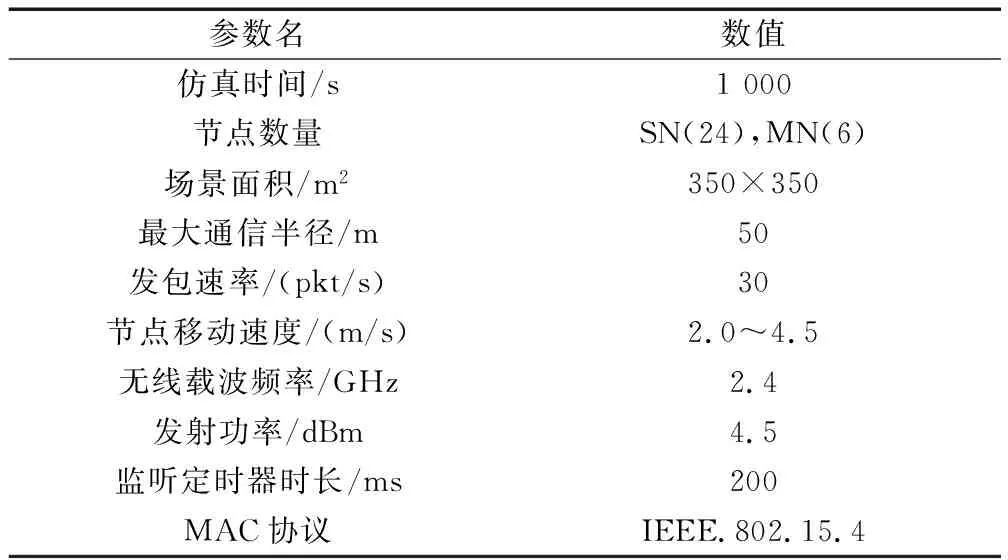
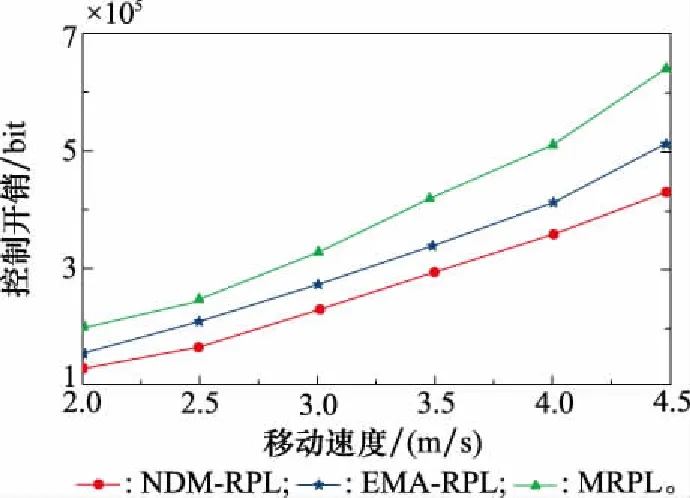
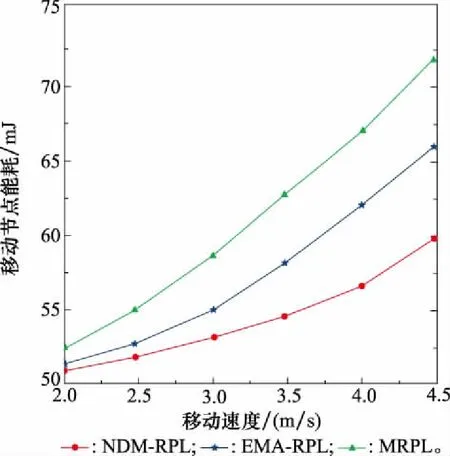
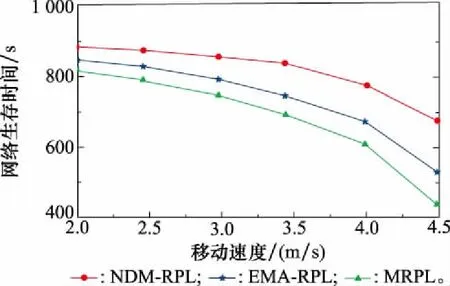
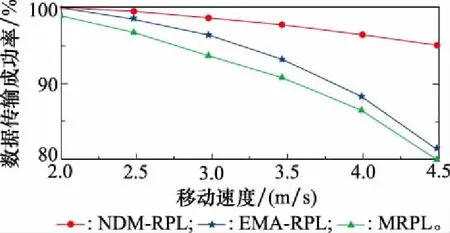
步骤 3CPN继续从MN接收数据包测得RSSI值每测得一个RSSI值就和RT比较大小。若RT>RSSI,执行步骤4。若RT 步骤 4CPN立即广播一次Flag字段为3的DIS控制消息告诉MN停止发送数据包,直到MN建立了与NPN的连接。由于MN已经处于危险阈值之外,为了保证MN能够接收到该DIS消息,CPN的邻居节点在接收到该消息后会检查自己邻居表内是否有MN的地址,如果有,则转发该DIS消息。如果没有,则丢弃该消息。 现有大多文献对MN选择NPN时仅依靠RSSI平均值或方差作为度量,并不能准确反映MN对于备选父节点的通信质量,且没有考虑到SN因为连接过多子节点而出现网络拥塞和能量急剧消耗的情况。NDM-RPL协议中MN选择新的NPN综合考虑了与移动性相关的变异系数Cv、节点剩余能量、备选父节点的网络深度和当前连接的子节点数。基于变异系数的父本选择目标函数如下所示: (2) 式中:rank为综合路由度量值;α、β、γ为权重因子且0<α<β<γ<1;M为每个SN能够连接的最大子节点数;H为当前节点传输数据到根节点所需的跳数,即网络深度;CN为当前节点连接的子节点数。 (1)变异系数:变异系数Cv是一种结合了ΔRi的标准差和平均值的性能指标,反映了不同SN对MN的信号强度变化趋势稳定性的关系。Cv越小,表明该SN对于MN表现出更好的稳定性,MN能与之保持更长时间的连接。一定程度上减少了由于移动带来的频繁切换父节点的次数,也减少了MN的能耗。Cv与ΔRi的计算由下式得出。 (3) ΔRi=|RSSIi,t-RSSIi+1,t+1|,i (4) 式中:ΔRi表示SN在监听预选阶段中连续时间[t,t+1]内的两个RSSI值的差的绝对值;RSSIi表示第i次测得的RSSI值。n表示测得的RSSI总个数。 以图4为例,假设MN的邻居节点a、b、c连续监听到的6次RSSI绝对值。节点a监听的|RSSI|是91,95,92,95,91,94。节点b监听到的|RSSI|是42,31,41,32,42,31。节点c监听到的|RSSI|是4,10,18,22,28,37。若按RSSI平均值最大原则选择NPN,易知节点c的RSSI平均值最大,但节点c的RSSI值变化趋势很不稳定,不适合被预选为MN的NPN。若按RSSI方差最小原则选择NPN,易知节点a的方差最小,但节点a的RSSI值太小,通信链路质量较差,也不适合被预选为MN的NPN。由式(3)和式(4)计算可得到节点a、b、c的变异系数分别为22.32、20.44、60.28。可知b的变异系数最小,所以节点b更适合作为MN的NPN。求ΔR的标准差而不是直接求RSSI值的标准差的原因是使用ΔR能得到比使用RSSI更小的标准差使其计算的rank值更小,同时能正确的反映RSSI值波动幅度大小的稳定性,在节点a、b、c的rank值比较中,b才易被选为NPN。 图4 节点a、b、c连续监听到的RSSI (2)节点剩余能量:在LLN中,如何均衡能量消耗一直是一个备受关注的问题。因为无线传感器依靠电池运行,当电量耗尽,设备就会停止工作。如果不考虑剩余电量,很可能导致一个设备的电量被迅速耗尽。为了克服这个问题,在选择父节点时,考虑节点的剩余能量是至关重要的。剩余能量按下式计算: Erest=Etotal-Econsume (5) 式中:Erest为剩余的能量;Etotal为节点总能量,其是消耗的总能量。这里的Econsume由下式计算得出[22]: (6) 式中:V为无线传感器的供电电压;Iap、Ilp、Itx、Irx和Ini分别为微控制器处于正常运行、低功耗、发送、接收状态和传感器处于工作状态的电流;Tap、Tlp、Ttx、Trx和Tni分别为上述5种状态下的运行时间。 (3)备选父节点的网络深度H和当前已连接的子节点数(CN:MN)在选择NPN的过程中考虑其备选父节点的子节点数目能够有效避免连接子节点数过多的节点,一定程度上均衡网络中SN的负载。避免SN因为连接过多子节点而出现网络拥塞和能量急剧消耗的情况。 M减去CN表示当前可连接的子节点数,从式(2)可以看到当多个节点网络深度H相等时,M-CN越大,rank值越小。而当多个节点的当前可连接的子节点数相等时,H越小,rank值越小。而rank值越小,越容易被预选为MN的NPN。 为了解决备选父节点集选取不合理和减少MN的能耗,提出一种基于邻居节点的监听预选机制。在MN处于CPN的ST和RT之间时,MN会广播带有MN_ID的DIS消息。MN_ID的作用是为了区分整个网络中不同的MN。 由于MN的能量有限,如何合理节省其能耗是一个亟待解决的问题。为此,在根节点广播DIO消息构建网络拓扑时,每一个SN都会通过监听的DIO消息和DIS消息维护一个邻居表,该表存放了邻居节点的地址信息。该设置的目的是当MN的周围存在大量SN时,CPN能够帮助MN处理一部分数据以此减少MN的能耗。 基于邻居节点的监听预选机制具体过程如下。 步骤 1当MN已经处于CPN的安全阈值ST和危险阈值RT之间时,MN会收到来自CPN的DIS控制消息。此时,MN会广播DIS(MN_ID)控制消息,其邻居节点收到该消息后分别设置一个包监听定时器,开始监听MN向CPN发送的数据包,测得并缓存RSSI值。执行步骤2。 步骤 3邻居节点依据式(2)计算出rank值并查找邻居表中是否存在该MN的CPN。如果存在,则单播给MN的CPN一个携带rank值的DIS消息。如果不存在,则直接单播给MN。CPN收到多个该消息后,比较得到最小rank值和该值发送者的地址,使用DIS控制消息单播给MN。执行步骤4。 步骤 4MN收到来自CPN和邻居节点DIS控制消息后,比较得到最小rank值,选取rank值最小的节点作为NPN。MN向NPN单播一个普通的DIS控制消息申请入网。执行步骤5。 步骤 5预选的NPN收到来自MN的普通DIS控制消息,会单播一个普通DIO控制消息给MN,建立与MN的连接。如果此时的MN还在和CPN进行数据传输,则MN在建立与预选的NPN的连接之后,再断开与CPN的连接。以减少数据包的丢失。 为了更好实现本文提出的协议并保持与RPL标准协议的兼容性,同时节省MN切换父节点带来的控制开销,在DIS控制消息中修改一些字段,Flag字段占3bit,MN_ID占12 bit,rank占8 bit,如图5所示。 图5 修改后的DIS帧格式 对于DIS消息来说,Flag=0代表它是一个简单的请求入网消息。Flag=1代表SN单播带有rank值的DIS消息给MN或MN的CPN。Flag=2时是MN广播一个携带MN_ID值的DIS消息给它的邻居节点。Flag=3时是CPN通知MN停止发送数据。Flag=4时是CPN发送给MN的DIS消息。 NDM-RPL算法流程图如图6所示。 图6 NDM-RPL算法流程图 假设网络拓扑初始化后,网络运行一段时间t后,此时存在P个MN需要切换父节点。对于第i个MN来说,t时刻其邻居节点总数为Qi个且Qi≥1,平均RSSI大于ST的邻居节点总数为Li个且Li≥1,其CPN的邻居节点总数为Ki个。是MN而不是其CPN的邻居节点且平均RSSI大于ST的邻居节点总数为Hi,且0≤Hi≤Qi。 设CE、CM和CN分别是EMA-RPL、MRPL和NDM-RPL在t时刻需要切换CPN的所有移动节点完成切换过程的总控制开销,DIS、DIO、DAO、DAO-ACK消息的大小分别为lS、lI、lA、lK。故有 (7) (8) 又有 (9) 因为lI比lS大8 byte,且Qi+1>Hi,故CM>CN。可知NDM-RPL算法移动节点寻路控制开销明显低于MRPL。 EMA-RPL算法中,MN的备选CPN集依据其CPN的邻居节点构建,故总的计算次数等于所有MN备选CPN集大小之和,其计算次数表达式为 (10) MRPL算法中,每个MN依据自身的邻居节点构建备选CPN集,故总的计算次数为 (11) 本文算法中,每个MN依据自己的邻居节点构建备选CPN集,且平均RSSI大于ST的邻居节点才会加入备选CPN集。故总的计算次数表达式为 (12) LLN网络中,由于CPN为静态节点,具有较好的网络稳定性,其周围存在的邻居节点总数一般情况下大于等于MN的邻居节点总数,故Qi≤Ki,而Li 本文使用Contiki的IPv6/6loWPAN平台开源操作系统进行网络模型的搭建和仿真。Contiki里有被广泛使用的RPL开源实现[23-24]。对参与移动切换过程中的MN和SN的控制开销、移动节点能耗、网络生存时间、数据传输成功率4个方面与MRPL、EMA-RPL进行对比和分析。 在350 m×350 m的仿真场景中构建网络规模大小为SN(24)和MN(6),移动节点MN随机移动。为了得到稳定的仿真结果,每次仿真设置随机种子值分别为128、256、528。对每个随机种子值仿真重复10次,取平均值作为仿真结果。在多次仿真过程中,由于MRPL和EMA-RPL算法在节点移速超过4.5 m/s后,性能表现较差,其仿真结果参考性较低。为了更好地比较3种算法在不同速度下的性能,故仿真参数中节点移动速度设置在2~4.5 m/s。参数设置如表1所示。 表1 仿真参数设置 4.2.1 控制开销 控制开销是指MN为寻找NPN发送或接收的控制消息(DIS,DIO,DAO,DAO-ACK)总比特数。在图7中,描绘了MN的移动速度变化对控制开销的影响。 图7 控制开销对比 随着MN移动速度的增加,MN需要多次使用控制消息切换当前连接的CPN。故3种协议的控制开销均随着移动速度的增加而上升,但NDM-RPL路由协议控制开销明显低于MRPL和EMA-RPL,而EMA-RPL路由协议的控制开销又低于MRPL。NDM-RLP、EMA-RPL和MRPL的平均控制开销分别为2.79×105bit、3.17×105bit和3.83×105bit。与EMA-RPL和MRPL两种协议相比,NDM-RPL的控制开销分别下降了11.99%和27.15%。这是由于MRPL是通过MN周期性的接收控制消息计算出RSSI值,同时负责检测其移动性并寻找NPN,该过程使MN花费了较大的控制开销。EMA-RPL虽然将移动性处理过程交付给了MN的CPN来处理,一定程度上降低了MN的控制开销,但在计算RSSI值时仍需MN广播3次DIS消息。而NDM-RPL在计算RSSI值时通过MN的邻居节点监听MN发向PN的数据包计算得到,避免通过发送控制消息来计算RSSI值,且修改了用于切换CPN的DIS控制消息帧格式,从而有效降低了MN为移动性处理而使用的控制开销。 4.2.2 移动节点能耗 移动节点能耗是指移动节点MN在仿真时间内消耗的总能量。Pap、Plp、Ptx、Prx和Pni分别为微控制器处于正常运行、低功耗、发送、接收状态和传感器处于工作状态的功率:Tap、Tlp、Ttx、Trx和Tni分别为上述5种状态的运行时间。故MN总能耗EMN的计算公式为 (13) 图8描绘了MN的移动速度变化对移动节点能耗的影响。从仿真结果可知,随着MN移动速度的增加,3种协议下的MN均需要频繁切换CPN,从而导致MN的能耗增加。但在不同移动速度下NDM-RPL路由协议能耗均低于EMA-RPL和MRPL。NDM-RLP、EMA-RPL和MRPL的平均能量消耗为分别为53.67 mJ、58 mJ、61.55 mJ。与EMA-RPL和MRPL两种协议相比,NDM-RPL的能量消耗分别下降了7.45%和12.8%。这是由于MRPL将寻找NPN的任务交给MN自身处理,该过程会使用发送和接收大量控制消息。因此,随着移动速度的增加,MN的能量将消耗非常快。在EMA-RPL中,MN虽然不直接参与移动性处理过程,但由于EMA-RPL开始寻找NPN的起始时间太晚,当移动速度处于2~4.5 m/s时容易导致MN不能在离开CPN通信范围之前建立与NPN的连接,此时又需要MN主动寻找NPN,此过程也会大量消耗MN的能量。而NDM-RPL通过链路质量检测机制和监听预选机制,使得MN并不直接参与NPN的寻找且能够及时预选出NPN,从而降低了MN的能量消耗。 图8 移动节点能耗对比 4.2.3 网络生存时间 网络生存时间是指从仿真开始时间到出现第一个死亡节点(能量低于节点初始能量的1%)之间的时间差。图9描绘了MN的移动速度对网络生存时间的影响。 图9 网络生存时间对比 随着MN移动速度的增加,3种协议下MN的网络生存时间逐渐降低。但相同速度下NDM-RPL网络生存时间明显高于其他两种协议。NDM-RLP、EMA-RPL和MRPL的平均网络生存时间分别为823.31 s、743.67 s、683.33 s。与EMA-RPL和MRPL两种协议相比,NDM-RPL的网络生存时间分别延长了10.76%和20.49%。分析其主要原因,在于EMA-RPL和MRPL在MN寻找NPN时均未考虑节点剩余能量和没有限制静态节点SN的可连接子节点数。特别是在整个网络拓扑中MN数量较多时,易造成剩余能量较少的静态节点SN过早死亡。NDM-RPL在MN寻找NPN的过程中使用了基于变异系数的父本选择目标函数,不仅考虑了节点剩余能量,还限制了每个SN可连接的最大子节点数,能够最大化地均衡网络负载,从而达到延长网络生存时间的目的。 4.2.4 数据传输成功率 数据传输成功率P是指MN发送的数据包N和其CPN接收来自MN的数据包个数n之比,计算公式为 (14) 图10描绘了MN的移动速度变化对数据传输成功率的影响。从仿真结果可知,随着移动速度的增加,3种协议下的MN数据传输成功率均有所降低。但在移动速度为2~4.5 m/s时,NDM-RPL路由协议的MN数据传输成功率明显高于MRPL。在移动速度为2.5~4.5 m/s时,NDM-RPL数据传输成功率明显高于EMA-RPL。NDM-RLP、EMA-RPL和MRPL的平均数据传输成功率为分别为97.5%、92.01%、90.83%。与EMA-RPL和MRPL两种协议相比,NDM-RPL的平均数据传输成功率分别提升了5.92%和7.34%。这是由于MRPL不能在切换CPN过程中保证自身与CPN的连接,从而导致了数据包丢失的可能。在EMA-RPL中,MN虽然能在切换CPN过程中保证自身与CPN的连接,但在移动速度处于2~4.5 m/s时,出现了未找到NPN就与CPN断开连接的情况,这也会导致数据包的丢失。而NDM-RPL通过链路质量检测机制能够及时让MN发起预选NPN的通知。监听预选机制使得MN在移动速度较快时,也能寻找通信链路质量较好且连接稳定的静态节点SN作为NPN并实现切换CPN的无缝连接,有效减少了丢包的数量。 图10 数据传输成功率对比 本文针对当前LLN中对RPL路由协议在中速场景下的移动性研究存在移动节点的CPN切换不及时,备选CPN集冗余和路由度量单一的问题提出NDM-RPL路由协议。该协议通过为SN设置安全阈值ST和危险阈值RT,以便移动节点提前开始寻路。然后,提出一种监听预选机制,通过MN的邻居节点监听该MN发送到CPN的数据包得到RSSI值,以此排除冗余的备选CPN,能够有效降低节点能耗。最后结合变异系数、节点剩余能量、备选CPN的网络深度和当前连接的子节点数选出NPN。结合仿真结果和理论分析可知,NDM-RPL路由协议性能比较于EMA-RPL和MRPL均有显著提升。2.2 基于变异系数的父本选择目标函数

2.3 基于邻居节点的监听预选机制

2.4 控制消息帧格式的修改

3 NDM-RPL算法性能分析
3.1 移动节点寻路控制开销
3.2 计算复杂度分析
4 仿真验证
4.1 仿真参数
4.2 仿真结果及性能分析
5 结束语