基于双扩展卡尔曼滤波的锂电池荷电状态估算方法
2021-11-10刘习奎
刘习奎
(欣旺达电子股份有限公司,广东深圳,518108)
0 引言
目前的新能源汽车充电较传统汽车加油速度慢许多,大概的充电时间在一小时左右,虽然已有的极速充电技术,能够在几十分钟内完成充电,但是此举并不能够保证完全充满电,还会对电池造成永久性伤害。一些学者提出采用卡尔曼滤波法估算锂电池荷电状态,通过两个系统状态研究发现,车载中的智能量子电池测量系统状态是一个高度复杂的非线性状态测量处理系统,选取两个系统状态模型方程中的两个智能电池系统模型状态soc和模型eod作为一个坐标系来测量智能电池系统状态,根据两个系统状态模型基本方程,分别建立智能电池状态测量系统,测量状态基本方程系统。soc曼恩模型频率是通过直接使用一个扩展卡尔曼滤波器函数,进行频率估算出来的,曼恩过滤高度完全依赖于曼恩模型。
1 基于双扩展卡尔曼滤波的锂电池荷电状态估算方法
■1.1 设计锂电池等效电路模型
电池的外部响应特性仅用物理反应来解释,而忽略了电池内部复杂的化学反应。锂电池电压与荷电状态的非线性关系主要出现在电池电量很低以及电池电量充满的区段,因此可以分析线性化锂电池的非线性关系,关系模型如公式1所示:

公式1中:Q表示锂电池的非线性关系;U1-U3、p1-p3分别表示线性关系中的系数;等效电路模型容易进行参数辨识,对处理器的要求低,易于工程实现,应用比较广泛。对此提出对电池充放电静置的方法,明确锂电池U和p的参数值,具体操作方法为,设置相同的外部条件为前提,采用恒定的水池电流通过放电降压方式对系统所选择的电池电流进行降压操作,在放电3%的容量时静置[1]。此时注意记录电压参数,此举直到电池电量充满为止,最后按照相同电容量时,提取平均值绘制成曲线数据,等效电路如图1所示。

图1 锂电池等效电路图
电池在进行充电和放电的过程中内部极化效应非常复杂,包括正电浓差反应极化、电化学反应极化等。曲线上的数据可能无法准确地描述镍锂电池,因为它不能准确反映所有电池极化效应现象以及电池动态效果。考虑到电路的零输入响应,因此对电路的放电输出方程作出改变,如公式2所示:

公式2中:R表示恒定电流放电参数;i表示电压发生的改变;y表示电路产生的零输入响应。电池等效减阻电路基本模型由模拟电容和等效电阻电路组成,用来精确描述固体电池的各种工作物理特性。这种方法的物理含义非常清楚,模型参数很容易识别。现阶段的动态动力电池管理模型的成本计算过于复杂,不能够大范围应用[2]。
等效电路模型的两个基本参数,电池容量参数和电池OCV参数,这两个参数根据工作环境而变化,电池之间的不一致会降低电路模型参数。因此,需要考虑电池容量参数和OCV参数的在线估计方法[3]。以二阶模型为例,等效电路模型参数的在线估计方法,如公式3所示:

公式3中:C表示二阶段模型中估算的电路参数。根据计算得到的电路模型参数,完成锂电池等效电路模型构建。
■1.2 基于双扩展卡尔曼滤波预测电池容量
电池容量的正确定义一般是一个电池在一定的充放电功率条件下使用所能够获得的额定电量。电池容量一般可以细分为电池理论使用容量、标称使用容量、额定使用容量和电池实际使用容量。卡尔曼滤波积分算法的设计过程,第1步:初始化设置,估算K=0时的最小均方误差估计值x(0)。第2步:估计更新状态并递归得到下一时刻的状态值、系统输出值和误差协方差值[4]。第3步:根据系统观察不断修改当前状态估计。第4步:不断地重复第2步和第3步,直到我们获得对于k一个时刻的时间误差协方差和实时误差值的估计。测量方法更新前,误差协方差和误差估计记为P(k)和ˆx(k),测量更新后,它们记为P(k)和ˆx(k)。第5步:在下一时刻k+1,递归判断是否有系统输入,有输入则返回第二步继续递归,无则退出。由于测量输入值的不断更新,使 P(k)处于不断变小的过程。上面的卡尔曼滤波算法是一个不断估计和修正的过程,此时的估计是根据前一个时间点的估计值和这个时间点的测量值计算出来的。电池温度对电池性能有显著影响。较高的电池温度可改善电池运行和电池性能,但温度不应太高。如果温度过高,会减慢电池的反应速度,降低电池的性能,严重时有爆炸的危险。如果电池在高温条件下使用时间过长,电池寿命也会明显缩短。反之,低温电池会直接降低大量电池的正常运行,增加大量电池的内部热阻和电池极化时的电压,使电池更容易达到放电截止状态[5]。此时,电池的能量利用率和实际可用容量都显着降低,电池所能接受的最大循环使用次数即为电池的循环寿命。电池的完全充电和放电称为一个循环。随着电池寿命的缩短,电池容量下降的现象称为电池老化[6]。与传统安时法相比,基于充放电倍率模型、温度模型、老化模型的改进安时积分法,其工作原理如公式4所示:

公式4中:α表示老化电池的参数;v表示锂电池的寿命。充放电最大输出电流与可充电池装置额定最大电池容量输出电流数值之比,即为该蓄电池充放式装置满电后的倍率,单位为C。
■1.3 估算锂电池荷电状态
荷电使用容量是电池在长时间使用或长时间未连续使用的绝对剩余容量,以及在充满电状态下的剩余电量充电后。通常用百分比系数公式来精确表示。电池参数状态是确保电池正常运行中最重要的性能参数之一。在实际应用中,估算荷电状态是非常必要的。针对新能源汽车而言,在合理地充分利用驱动电池产生电能的技术基础上,通过对驱动电池的荷电化状态的准确性和估算等,可以大大增强其纯电动车的超长续航驾驶能力[7]。同时,对电池状况的准确估计可以有效避免电池的过充和过度放电。它在合理使用电池方面起到了很好地指导作用,大大提高了电池的循环寿命,而且成本有所降低。这也是本文研究的意义所在。通过对负载电流曲线的积分计算得到表中的电池容量真值。通过表中数据对比可知,比值在一定阈值内保持恒定,可用于判定EKF法估计的SOC值是准确的,将此恒定的比值带入在线估计公式,则可准确地计算出电池容量值。SOC在电池估计中是极其重要的,往往需要通过预先的实验来获取SOC曲线。经过充分静态设置后,测量每个电池端开路电压值并作为电池开路恒流电压,不同开路电流的电池恒流和充放电功率曲线后,再来计算得到恒流SOC曲线,电池端开路电压与恒流ocv的波动关系,如公式5所示:

公式5中:Uo表示电池段电压参数值;I表示恒流工况下充放电的电流;R表示锂电池的内阻率。电流参数需要用实际电流的均值来计算,换言之1C 放电不能用额定值1C电流来计算,否则得到的结果误差很大。电流参数要用电流的实测值来进行计算,且需要对实验的所有电流值取均值后代入公式进行计算,如此得到的 OCV曲线才是准确的,如图2所示。
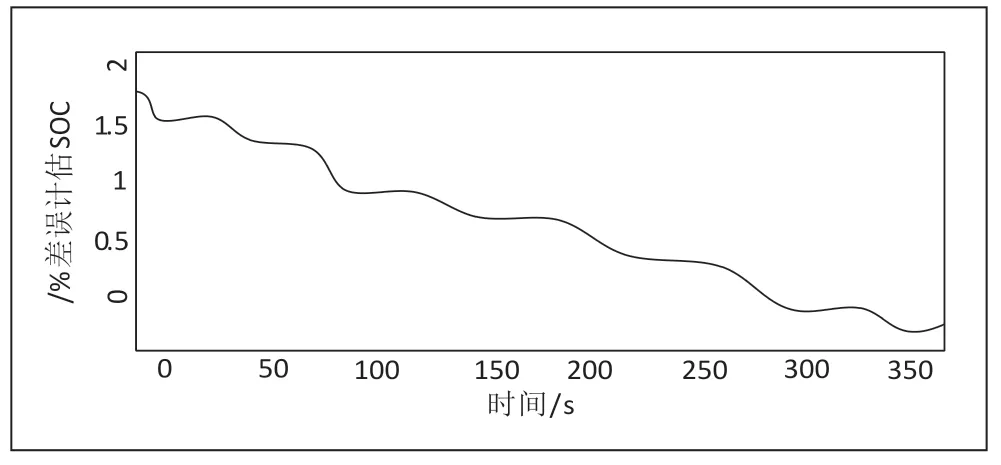
图2 OCV曲线
2 应用与分析
■2.1 实验准备
由于卡尔曼滤波算法需要大量运算,所以无法在单片机上实现,本实验利用一块 DSP5509A开发板作为运算单元,通过多功能板和基于 MAX17830 的采集板获取电压、电流和温度数据,建立了面对产品应用的比对实验系统,双扩展卡尔曼滤波算法被移植到了DSP开发板上。
采集单元利用多功能板的单片机作为采集控制中心,通过I2C接口与MAX17830板连接得到电池的电压数据,通过SPI接口连接AD7734采集霍尔电流传感器 ACS712的输出得到负载电流值,采集到的数据通过串口分别传给估计单元和上位机。

图3 DSP开发板
■2.2 结果分析
为验证文中卡尔曼滤波估算方法的优势,提取变结构滤波、模糊结构滤波两种传统滤波估算方法,对相同荷电状态的锂电池进行最小误差估算。为保证实验的可靠性,设置10组测试小组,3种滤波的测试结果,如表1所示。

表1 3种滤波估算荷电最小误差(%)
根据表1测试结果可知,变结构滤波10组测试下的最小误差平均值为1.14%,模糊结构滤波的平均值为1.03%,文中卡尔曼滤波的平均值为0.52%,分别小于两种滤波0.62%、0.51%的误差。因此,得出文中滤波估算锂电池荷电的最小误差优于其他两种方法,为锂电池荷电状态估算方法提供新思路。
3 结束语
本文利用相邻时间间隔的电池端电压差值,消除电池电化学极化电势和浓度极化电势对OCV估计的影响,无需通过电池长时间空载静置来使电池超电势为0,实现了OCV参数的在线获取。通过实验测试表明,文中方法在估算锂电池上优于变结构滤波以及模糊结构滤波。