基于ARM的小型交通指挥机器人系统设计
2021-11-10王弘毅刘哲盛文君牟祖坤贾淇惠刘昌景
王弘毅,刘哲,盛文君,牟祖坤,贾淇惠,刘昌景
(菏泽职业学院,山东菏泽,274000)
0 引言
进入21世纪以来,机器人自动控制技术得到广泛应用,工业机器人水平已逐渐成为衡量一个国家自动化程度的关键性能指之一。随着工业技术的发展,机器人的应用领域已经不单局限于工业用途,而向更广阔的领域逐步扩展,例如交通、医学、家庭、酒店服务等领域。
随着国家的发展,我国汽车保有量逐年增高,随之而来的是交通拥堵日益严重,出行时间增多,交通事故频发。汽车保有量的增高使人们对交通畅通的需求也有着更高的要求。由于交警需要在酷暑、寒冬、雨雪、雾霾天气下工作,工作环境非常恶劣,且工作劳动强度较大。基于以上原因,本文设计了一个小型的基于ARM的智能交通指挥机器人系统。
本系统具有以下特点:
(1)采用智能控制技术,该技术可以有效的使交通灯系统与机器人进行配合使用,保证交通指挥的有效进行,又不受限于红绿灯,同时在交通灯系统发生故障时进行交通指挥,保证交通顺畅。
(2)智能交通机器人底部采用旋转设计,实现交通指挥的全面性,使其能够平稳的进行交通指挥的工作,并且手臂拥有6个自由度,能够完成多种交通动作的指挥。
(3)采用基于光电传感器的量车流量检测系统,实时监测车流量,当各个方向车辆差距较大时设计让等待时间增长,即让车辆多的一边多通行一会,从而减少交通堵塞。
1 系统整体设计方案
该智能交通机器人系统具体组成部分如图1所示,该系统由四部分组成,第一部分是整体平台,负责承载机器人、模拟车辆,第二部分是机器人本体,第三部分是模拟车辆,第四部分是控制系统。

图1 智能交通机器人系统结构
整体平台负责承载机器人与模拟车辆、数码管、LED灯这几个部分;机器人本体负责实现各种交通指挥动作,以指挥模拟车辆的行驶;模拟车辆负责接收来自控制系统的数据,进而执行不同的动作;控制系统采用ARM架构的STM芯片,用来控制机器人实现不同的指挥动作,并同时控制LED与数码管的显示数据和无线传输数据等。
工作时,主控芯片负责控制外部的LED灯与数码管模块显示,同时控制无线通讯模块发送数据,小车对接收来的数据进行判断后执行动作,小车沿规划的赛道运动,到达目的地后小车自动停止运动。
主控部分通过STM32F103ZET6、光电传感器、NRF2401、LED、数码管模块等组合实现通讯与机器人控制,该部分能够控制LED的亮灭进而与模拟车辆进行通讯,控制机器人执行不同的动作、根据光电传感器反馈的信号改变通行时间。小车采用亚克力车模制作,包含STM32F103RBT6、NRF2401、L298N、光电传感器、支架(3D打印),可实现机器人的各种转动控制与供电。
2 机器人本体
机器人本体由机器人控制单元、电源单元、机械单元、无线传输单元四部分组成,机器人控制单元的作用为控制机器人执行不同的交通指挥动作;电源单元负责为机器人和ARM芯片提供电能;机械单元负责把机器人各个部件连接到一起,并使得机器人能够正常运转;无线传输单元负责无线传输数据,即把主控发出的信息发给模拟车辆,使得模拟车辆根据接收到的数据完成不同的指令动作。
■2.1 机器人总体机械结构
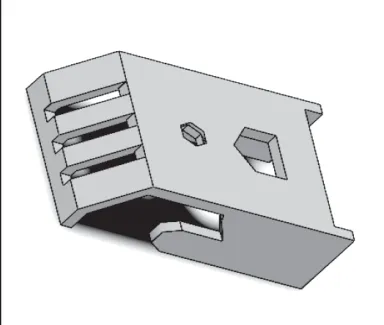
图3 机器人手
机器人包含舵机、支架、舵盘、电池、舵机控制板。为了让机器人更加形象,制作了头部、手臂、躯干、腿部几个部分,机器人三维模型如图2所示。为了更好的模拟交警指挥动作并减少机加工成本,机器人的手部采用了3D打印的爪子,如图3所示。机器人的整体结构采用了大U、短U和舵机进行连接,底部为了使受力更加均匀,交通机器人底部利用推力圆柱滚子轴承采用了旋转设计。
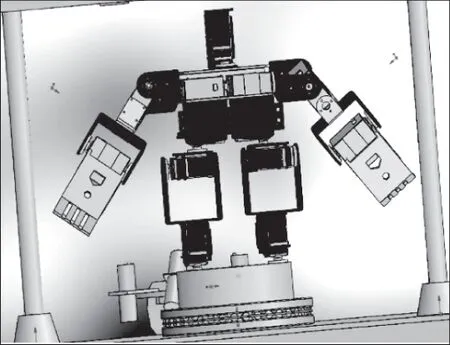
图2 交通指挥机器人三维模型
机器人拥有10个自由度,分别为手臂6个自由度和腿部4个自由度,能够完成停止、直行、右转弯、左转弯、变道等动作。可因不同的指令做出相应的动作。
■2.2 机器人控制模块
机器人的控制模块采用了ARM架构的STM32F103 ZET6芯片,通过ZET6的串口与外部的舵机控制板进行通讯,从而控制机器人执行各种不同的动作。STM32F103 ZET6是一种嵌入式-微控制器的集成电路。该芯片性能强悍,接口多且易于调试,较符合该项目的需求,该芯片原理如图4所示。
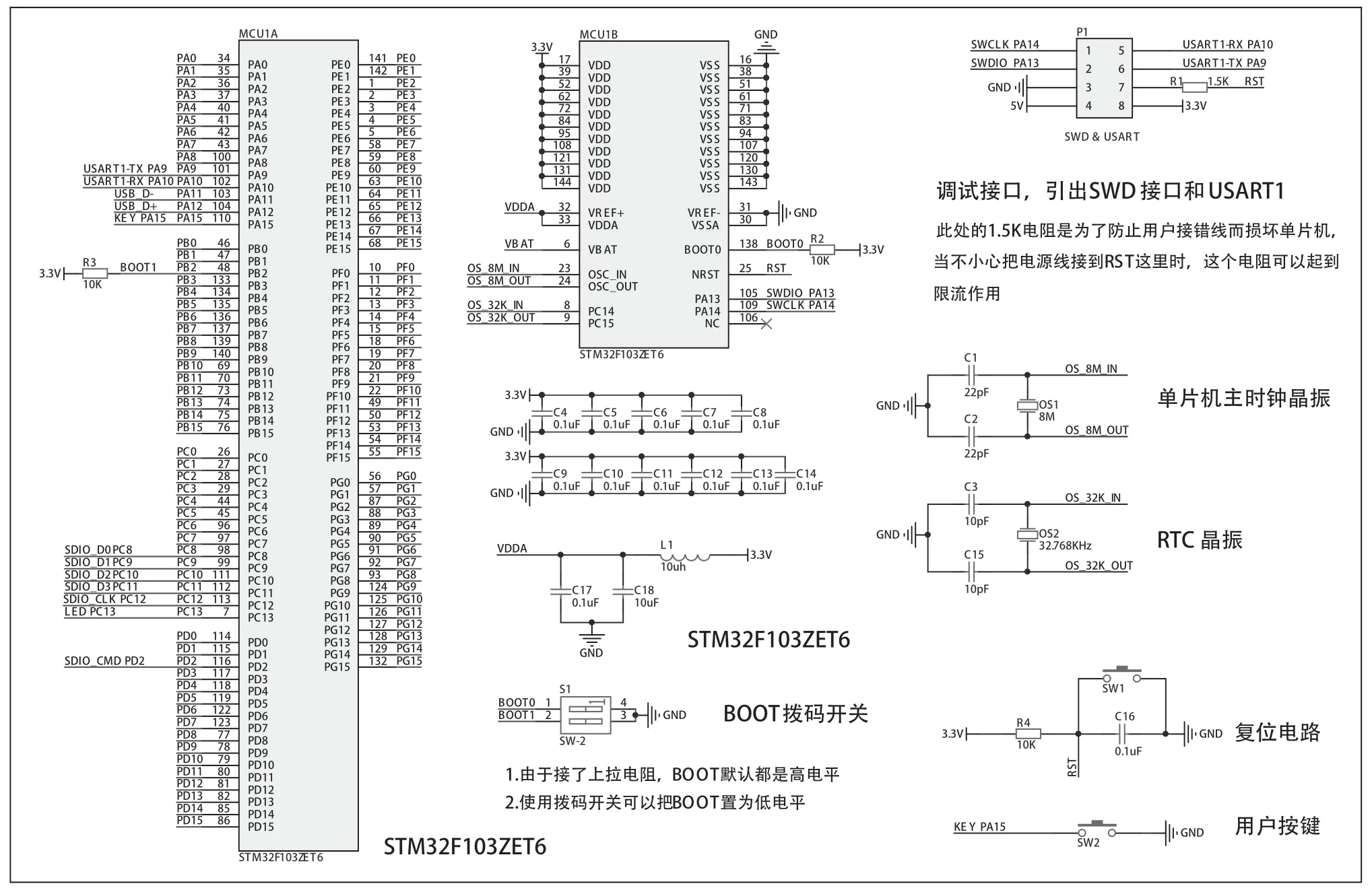
图4 STM32F103ZET6芯片原理图
STM32F103ZET6同时控制LED灯与数码管模块的闪烁与数据显示,当机器人执行完指挥动作以后,根据执行的动作,相应通行方向的LED变为绿色或者红色,同时数码管显示出通行的时间,此时程序把NRF2401设置为发送模式,把数据发送给接收端的NRF2401,从而可控制智能小车执行不同的动作。
■2.3 无线传输模块
NRF2401是单片射频收发芯片,工作于2.4~2.5GHz ISM频段,芯片内置频率合成器、功率放大器、晶体振荡器和调制器等功能模块,输出功率和通信频道可通过程序进行配置。NRF2401适用于多种无线通信的场合,如无线数据传输系统、无线鼠标、遥控开锁、玩具等。其原理如图5所示。
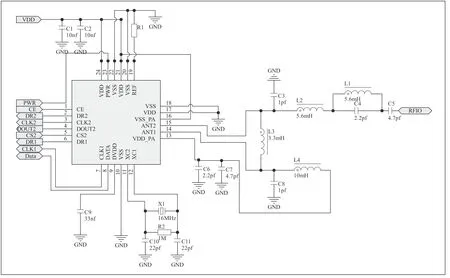
图5 NRF2401原理图
本系统采取点对点的数据传输,当接收到数据后,通过函数处理执行不同的动作。机器人完成不同的指挥动作之后,把机器人上的NRF2401设置为发送模式,把模拟车辆上的NRF2401设置为接收模式,接收端不断地去判断收到的数据进行比较后执行不同命令。
祖国医学认为:糖尿病性骨质疏松症的发病之本是肝肾亏虚。肾乃人体先天之本,肾虚则固摄无权,精微不藏走泻,津液亏乏火炽,发为消渴症;肾虚贯穿于糖尿病的各个阶段[2]。肾虚则骨髓生化乏源,精血不足,筋骨失养,筋腱无力。肝血不足则筋失濡养;肝气郁结则脉络闭阻,筋失濡养,久则伤骨。肝肾两脏器的联系极为紧密,肾精亏虚致肝血不足,肝血不足致肾精亏虚,二者互为因果,因此对于糖尿病性骨质疏松症的治疗,肝肾同治术后基本原则。
3 模拟车辆部分
模拟车辆分为为五个模块,分别是控制系统,电源系统,无线传输系统,电机驱动系统和循迹系统。为了满足车辆体积小、功耗低的要求,本系统采用了三轮式模拟车辆,前轮为万向轮,这样只需要控制后两轮的转向即可控制整个小车的行动方向。当模拟车辆上的无线发送模块设置为接收模式时,就可以等待发送来的指令,收到指令后驱动电机即可被控制。
■3.1 控制系统
模拟车辆控制系统在驱动电机行驶的同时也负责接收来自于机器人端NRF2401发送的数据,同时还需接收光电传感器反馈回来的信号,用于在平台上进行循迹运动,为了实现以上功能,并尽可能压低成本,本系统同样采取了ARM架构的STM32RBT6,它有64个引脚,SPI与PWM(脉冲宽度调制)输出,并且具有计算能力强,主频高等优点,并且支持3.3V供电与低功耗模式。
■3.2 无线传输系统
模拟车辆部分的无线传输模块设置为接收模式,在没有数据的时候一直等待发送端的数据,当接收到发送端发送的数据后,把数据传输给模拟车辆的控制部分进行运算,然后车辆根据接收到的数据进行判断,如果与发送端的数据一致,车辆则进入运动模式。
■3.3 电机驱动系统
电机驱动系统通过主控的两个GPIO引脚实现控制功能,并把主控的PWM输出引脚接至电机驱动模块的占空比调节引脚上,从而控制电机动作。并且本系统应用了差分运动算法,即令芯片的PWM1引脚产生的占空比为50%,PWM2产生的的占空比为54%,这样消除了因电机本身制作产生的的误差,克服了两电机转速不一致的影响。
L298N是一种电机驱动芯片,结构如图6所示。它可同时控制两个直流减速电机做不同动作,并具有过热自断和反馈检测功能。L298N可对电机进行直接控制,通过主控芯片的I/O输入对其控制电平设定,为电机进行正转反转驱动,操作简单、稳定性好,可以满足直流电机的大电流驱动条件。
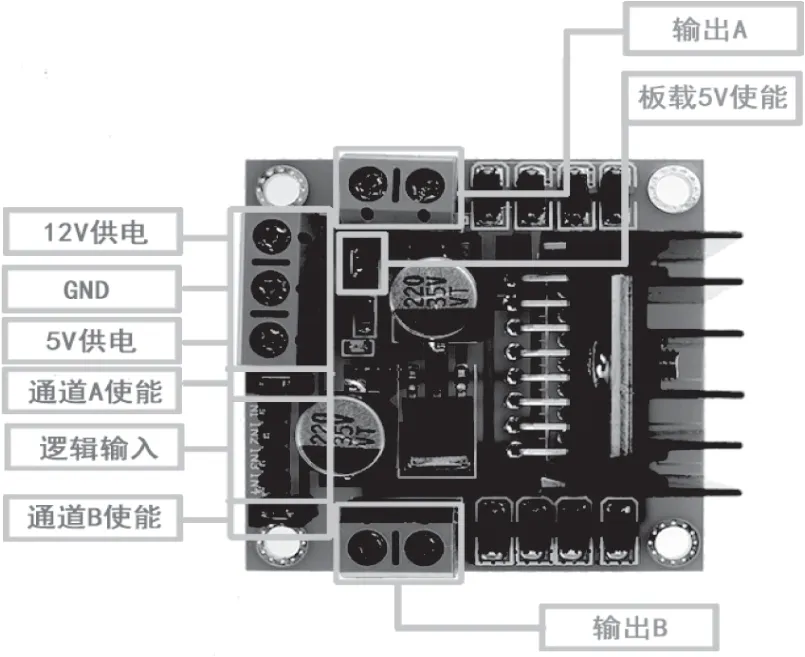
图6 L298N模块结构
本系统使用L298N实现对小车电机的正转、反转和停止的控制,将芯片的输出引脚1、2接到左侧电机,将输出3、4引脚接到右侧电机,并且把PWM输出接到A相使能端口,把另外一路PWM接到B相使能端口。初始化引脚后,让PWM引脚输出波形给两个使能引脚,当接收到端口1拉高,端口2拉低的数据时将会产生前进信号,控制电机正转。电机正转、反转和停止的控制真值表如表1所示。
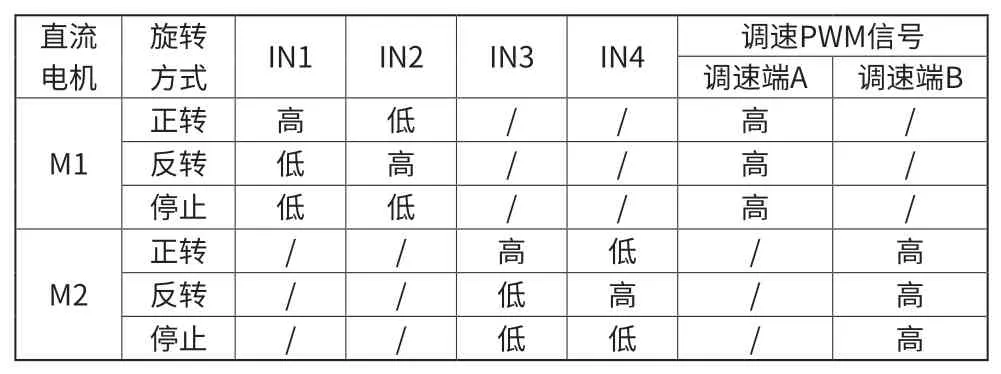
表1 小车电机程序控制真值表
在行驶的过程中,让两侧的光电检测轨迹线,防止小车冲出指定的赛道。当检测出到达平台边缘时,就让小车停前进,电机停止转动。
■3.4 循迹系统
循迹系统通过光电传感器检测平台上的轨迹,然后把检测的信息发送给RBT6,然后通过RBT6输出PWM控制模拟车辆沿着轨迹进行运动。
4 车流量计算
光电传感器是将光信号转换为电信号的一种器件。本系统采用了红外漫反射型光电传感器,其检测距离可以调节,当检测到物体的信号时,引脚会产生高电平,反之则产生低电平。其原理如图7所示。
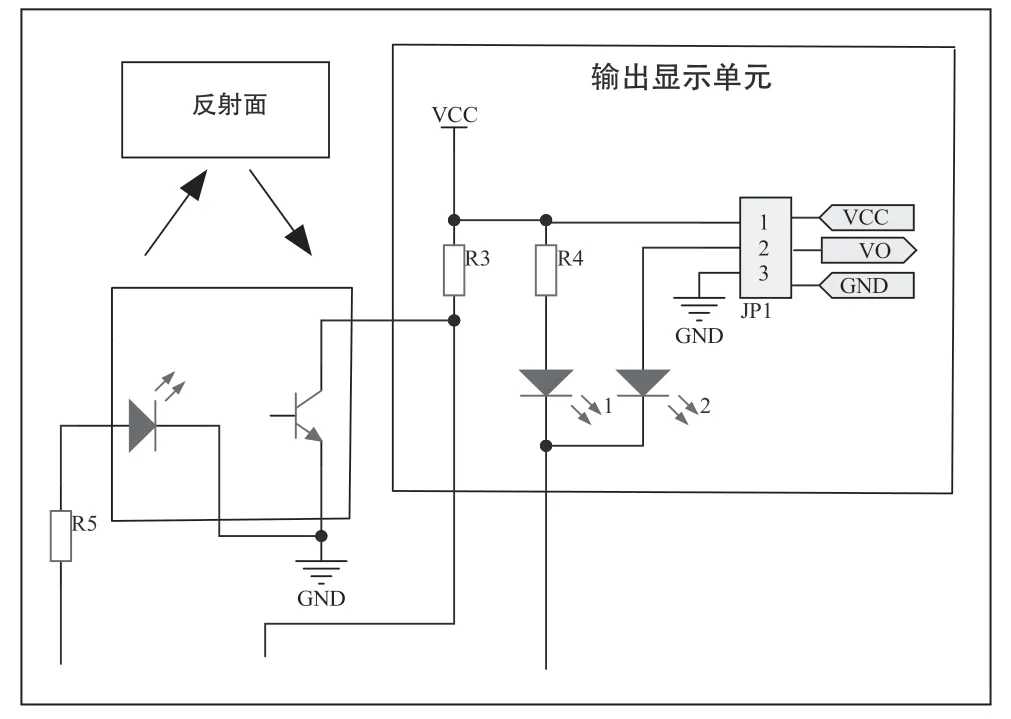
图7 光电传感器原理图
光电传感器在本系统中用于车流量计算,本系统在东西南北四个方向共加入了4个光电传感器。首先将引脚设置为外部中断模式,触发方式是上升沿检测,然后使能中断,当检测到车辆时,光电传感器的数据引脚会返回一个高电平,即“1”,然后触发中断,进入中断处理函数。先确定是否真的发生中断,然后让程序中的内部变量增加,这里的内部变量代表了实际中车的数量,当检测到车辆的时候会触发中断,中断函数中的变量增加。接下来清除中断标志位,然后对比东西和南北两个走向的车流量,当各个方向车的数量相差不大的时候,程序设置让通行时间不变,当各个方向车辆差距较大时设计让等待时间增长,即让车辆多的一边多通行一会,从而减少交通堵塞。
5 实物图
本系统的实物图见图8~10,目前可实现模拟车辆的停止、直行、右转弯、左转弯、变道等动作。通过实物测试,该系统可靠性较高。
图8 指挥机器人实物图
图9 车辆实物图
6 结语
本文设计并实现了一种小型的基于ARM的架构的智能交通指挥机器人系统。该系统拟在无人管理状态下,利用智能交通机器人通过对车流量的计算来进行拥堵优先级判断,选择合适的处理方法,使道路更加的畅通。
图10 整体平台图
