三相VIENNA整流器的双闭环控制策略研究
2021-11-09邓孝祥江泓澄刘宏洋
邓孝祥 江泓澄 刘宏洋
(黑龙江科技大学电气与控制工程学院,黑龙江 哈尔滨 150022)
0 引言
在“碳达峰、碳中和”战略目标的要求下,新能源汽车的发展迎来了新的契机。在电动汽车充电系统中,为了提高电网的电能质量、减少谐波电流的产生,需要进行功率因数校正。VIENNA整流器具有开关管数量少、电压应力低、高功率因数以及低谐波电流等优点,因此备受关注[1]。目前在VIENNA整流器的众多控制方式中,双闭环控制是最常见的控制策略。文献[1]采用传统的电流滞环控制策略,但由于开关频率不固定,因此会影响网侧电流质量。文献[2]电流内环采用一种模型预测控制策略,但对采样频率依赖较高,不能保证采用精度,同时也存在开关频率不固定的缺点。文献[3]采用单周期控制,系统简单且鲁棒性高,但参数设计烦琐,灵活度低,应用十分受限。还有研究者采用了一种谐振滑膜控制策略,虽然改善了电能质量,但是控制器设计难度大且容易引起系统谐振。基于上述问题,该文以三相类VIENNA整流器为研究对象。三相类VIENNA整流器与LCL滤波器相结合,不仅可以滤除高次谐波,还可以提高了整流器的功率密度。该文研究了类VIENNA整流器的工作原理,建立了在d-q坐标系下的数学模型。d-q坐标系下d轴分量与q轴分量存在强耦合关系,电流内环采用前馈解耦的控制策略,实现对电流分量的单独控制。电压外环采用PI控制,实现了对参考电压的快速准确跟踪,并对其进行了仿真与实验验证[2]。
1 VIENNA整流器的原理与建模
三相类VIENNA整流器与LCL滤波器相结合,不仅可以滤除高次谐波,而且还可以提高整流器的功率密度。三相类VIENNA整流器主电路如图1所示。其中ea、eb和ec为三相交流电压源,网侧电感(La、Lb和Lc)、网侧电容(Cf)以及PFC电感(Lf+、Lf-)构成LCL滤波器,电容Cf位于两电感中间,为滤波对象中的高频谐波分量提供通路。Dw+、Dw-为工频二极管,Df+、Df-为快恢复二极管,Si(i=1,2,…,6)构成各相桥臂双向开关管,RL为负载;M为电容中性点。
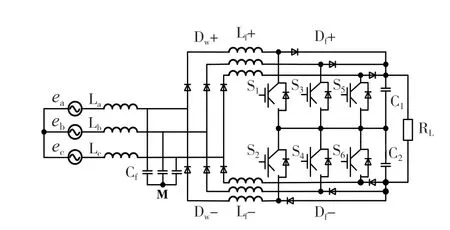
图1 类VIENNA整流器
在对VIENNA整流器进行建模时,可以将双向开关管等效成多投开关,得到类VIENNA整流器的简化模型。由于三相三线VIENNA整流器的电路结构是对称的,因此以A相为例进行分析:当ea>0时,由于Dw-反向截至A相电流流向只与S1有关。当S1导通时,则UA=0;当S1关断时,整流器的A相输入通过Dw+、Df+连接到直流母线电容C1正极,此时UA=0.5Udc(Udc为直流输出电压);当ea<0时,此时由于Dw+是反向截至的,因此A相电流流向只与S4有关,当S4导通时,整流器的A相输入钳位在直流母线电容中点电压,则UA=0;当S4关断时,直流母线电容C2负极通过Dw-、Df-连接到A相输入,此时UA=-0.5Udc[4]。为了更好地对VIENNA整流器进行理论分析和更精确地设计控制器参数,需要对VIENNA整流器进行建模。假设三相电网输入平衡,所有元件均为理想状态,开关频率远大于电网频率[3]。通过clark变换和park变换将三相电网转化为两相旋转坐标系,其简化数学模型如公式(1)所示。
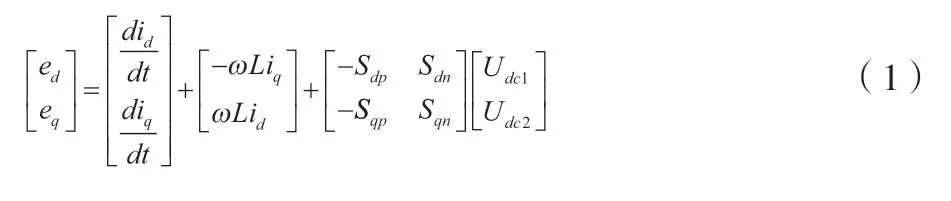
式中:ed、eq、id和iq为输入三相交流电源在d-q坐标系下得电压电流分量;L为交流侧等效电感;Udc1、Udc2为直流电压输出上下电容电压;Sdp、Sdn、Sqp和Sqn为d-q坐标系下的桥臂导通函数;ω为角速度。
2 VIENNA整流器的控制策略
2.1 电流内环控制系统设计
由VIENNA整流器在d-q坐标系下的数学模型可以看出,d轴与q轴的变量间存在耦合项,为消除ωLid和ωLiq的影响,采用前馈解耦的控制策略,实现id对iq和无功电流的单独控制,解耦控制方程如公式(2)所示。

式中:KiP、KiI为电流内环的比例调节参数和积分调节参数;分别为id、iq的电流指令;ud为有功功率电压;uq为无功功率电压;s为复频域,s=jω。
从公式(3)中的d轴与q轴表达式可以看出,解耦后可以实现对无功电流和有功电流的单独控制。考虑到电流内环的动态性能,需要具有较快的电流跟随特性,将其设计成I型控制系统,得到电流内环的闭环传递函数如公式(3)所示。
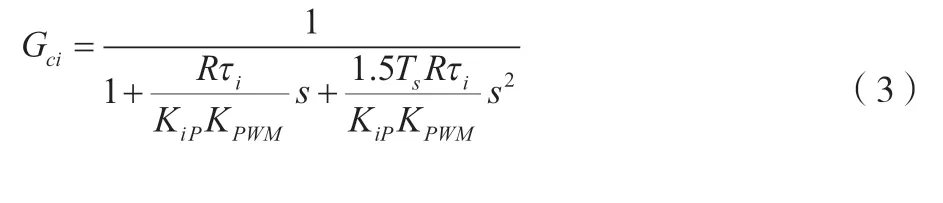
式中:Ts为电流采样周期;KPWM为整流器脉冲增益系数;R为电阻;τi为电流环时间常数,τi=L/R。
τi=L/R,取ξ=0.707得到公式(4)。

可得电路内环的PI参数如公式(5)所示。

2.2 电压外环控制系统设计
电压外环的主要作用是维持输出电压的稳定。由于VIENNA输出存在电解电容,因此在响应速度上应小于电流内环的响应速度[5]。
为增加系统的鲁棒性,按典型Ⅱ型控制系统对电压外环进行设计。为减少干扰与电压超调量,设定Kup=τuKuI(KuI为电压环积分系数),定义中频段带宽hu=τu/4Ts(τu为电压环时间常数),为保证在存在干扰的情况下,系统仍可以稳定地运行,取hu=4,并带入hu=τu/4Ts,得到电压外环的参数如公式(7)所示。
式中:KuP为电压环比例系数;KuI为电压环积分系数;C为电容;udc为直流输出电压。
3 仿真分析
为验证双闭环控制系统的可行性,在MATLAB/Simulink平台下搭建仿真模型。VIENNA整流器的仿真参数如下:电网相电压有效值为220 V,电网频率为50 Hz,输入侧滤波电感为1 mH,整流侧电感为1.5 mH,输入侧滤波电容为5 μF,输出上下级性电容为660 μF,开关频率为20 kHz,额定输出电压为800 V,额定功率为20 kW。
VIENNA整流器的仿真模型主要包括4个PI控制环路,分别是锁相环、输出电压外环、输入电流内环以及直流端中点电位平衡环。锁相环对三相输入电压进行计算,得到输入电压的相位信息,作为整个控制系统的相位同步基准。电压外环控制直流输出电压的幅值,PI调节器的输入为直流端的参考给定电压与直流端输出电压的差值。电流内环又包括解耦后d轴电流环和q轴电流环;其中,d轴电流环控制输入电流的有功分量,它的参考给定是电压外环的PI输出;q轴电流环控制输入电流的无功分量,它的参考给定为0。中点电位平衡环需要配合SVPWM控制调节脉冲[6]。
图2为VIENNA整流器在额定功率运行下的仿真结果。在0.0 s~0.3 s带载64 Ω 以10 kW的功率运行,从A相输入电压和电流波形,可以看到输入电流很好地跟随输入电压波形并保持同相位,很好地实现了校正整流器功率因数的功能。对系统进行功率因数分析和FFT分析,当系统稳定运行时,系统的功率因数大于0.995,A相输入电流总谐波畸变率为2.34%。
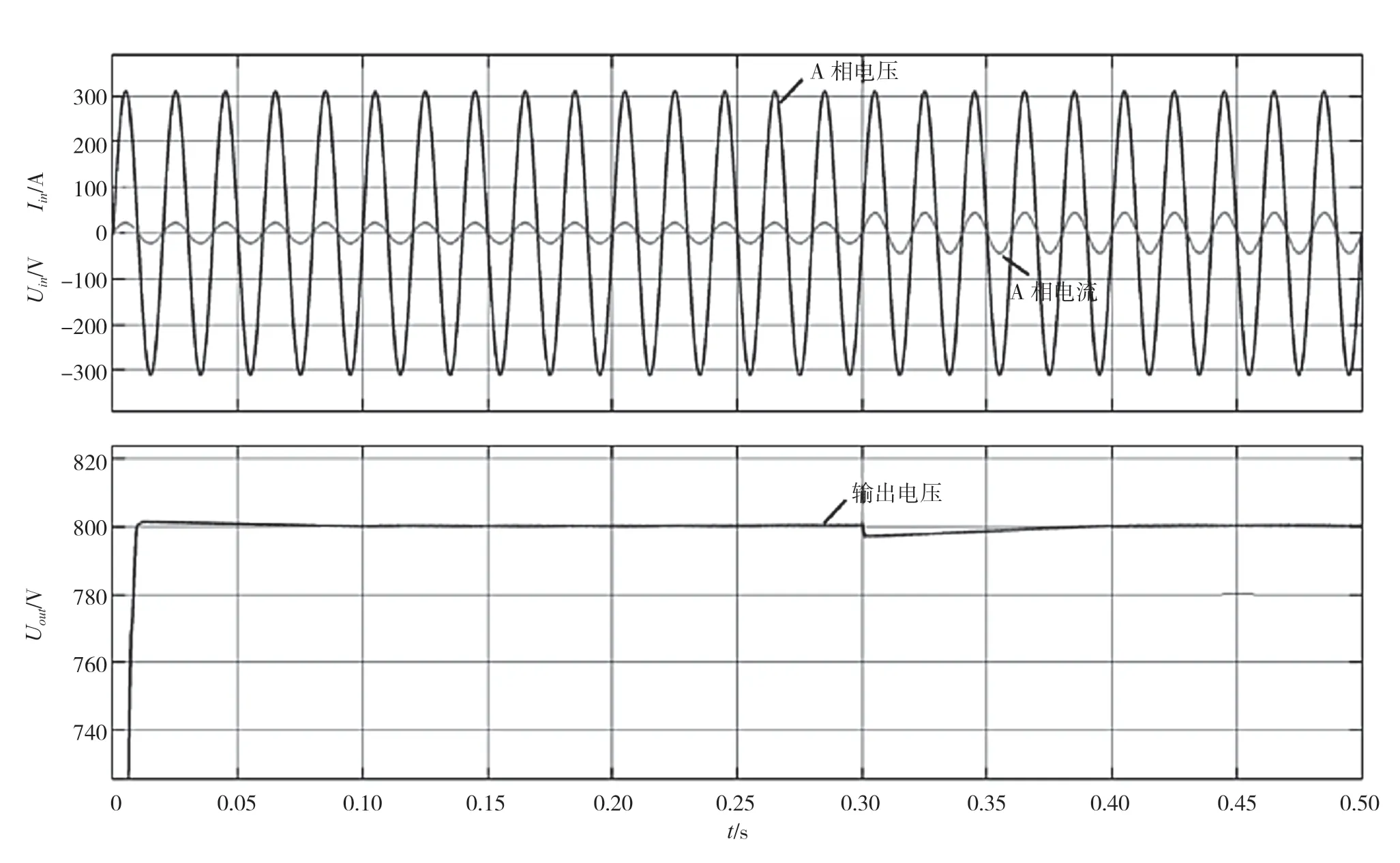
图2 VIENNA整流器波形图
从直流输出电压波形,可以看出输出电压无明显超调且快速达到稳定状态。为验证系统的鲁棒性和动态调节特性,在0.3 s时,负载突切为32 Ω,以满载20 kW的功率运行,可以看出在负载突变时,A相电压快速响应并无畸变,输出电压有一定电压跌落并在0.1 s内恢复稳定,系统具有良好的动态调节特性[7]。
4 实验结果分析
为进一步验证控制策略的合理性和可靠性,制作了1台额定功率为5 kW的样机。硬件参数设计与仿真参数相同,选用TI公司的C2000系列TMS320F28035作为主控芯片进行调理电路采样,保护以及驱动脉冲等工作,并基于IQmath库进行程序编写,将定点数转化为浮点数,进一步加快了运算速度。主功率开关管选用STW45N60M5,低频二极管选用RHRG5060,高频二极管选用STTH30L06W。
图3为VIENNA整流器额定功率下,A相输入电压和ABC三相输入电流波形。从图3可以看出输入电流正弦度高,所含谐波较少。A相电流很好地跟随A相电压波形,并保持同相位。输出电压稳定800 V输出并且纹波小,中性点位保持平衡并在负载变动时依然保持稳定且具有很好的鲁棒性。A相输入电流的总谐波畸变率为3.9%,功率因数为0.99。实验结果进一步说明了对VIENNA整流器的原理分析、数学模型建立、控制环路设计以及仿真的正确性。
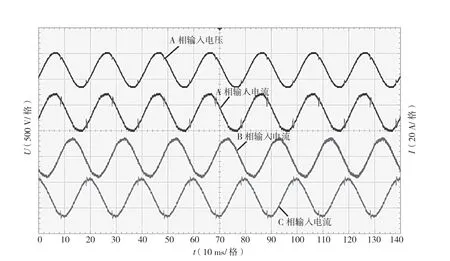
图3 A相输入电压与三相输入电流
5 结论
该文以结合LCL滤波器的三相类VIENNA整流器为研究对象进行详细分析,设计了基于PI控制的电压外环和基于前馈解耦控制的电流内环双闭环控制系统,通过MATLAB/Simulink仿真软件验证了控制环路参数的正确性,并搭建了1台5 kW的样机进行实验验证,给出了软硬件设计选型与相应的实验波形和测试数据。结果表明,应用该双闭环控制策略的三相类VIENNA整流器具有控制简单、输入电流谐波含量低、系统稳定性高以及动态调节特性好的特点。