语音控制自动分类智能垃圾桶设计*
2021-11-08刘磊,潘旭,余坤,林权
刘 磊,潘 旭,余 坤,林 权
(武夷学院 机电工程学院,福建 武夷山 354300)
随着环境污染日益严重,近年来智能垃圾分类装置研发一直是业界学者的研究热点,普通民众也都意识到保护环境的重要性[1-3],国家也相继出台了“生活垃圾分类制度实施方案”等法规,全国进入垃圾分类的“强制时代”,各种各样的智能垃圾桶接踵而来,但目前市场上各种智能垃圾桶普遍存在结构复杂和价格“不亲民”等不足[4-6],在此研发一种新型智能分类垃圾桶,该智能垃圾桶不仅结构简单,而且制造成本低,能够满足广大家庭用户的使用需求,市场应用前景好。
1 智能垃圾桶设计原理及结构组成
图1 为智能分类垃圾桶结构,其中图1(a)为三维模型展示,图1(b)为内部结构展示,该垃圾桶分为内、外桶两个部分,外桶1 安装设置驱动内桶10 的转动装置,转动装置主要包括转盘电机11、中心轴9、转盘2等,四个内桶10 分别为可回收垃圾桶、有害垃圾桶、湿垃圾桶和干垃圾桶,形状为扇形,垃圾桶通过语音识别模块控制垃圾桶的开启关闭,以及所需内桶的旋转复位,语音识别控制模块安装于垃圾桶盖4 的内侧。
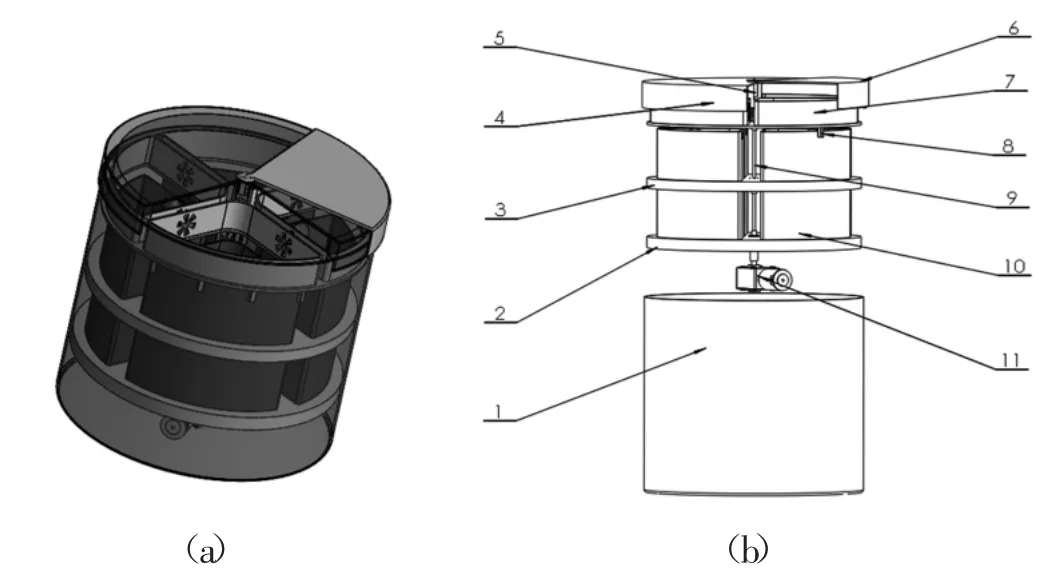
图1 智能分类垃圾桶结构
智能垃圾桶正常工作中,当投放垃圾时,使用者只要说出垃圾种类,例如“纸盒”,语音识别模块的声控接收器接收到语音信号,则驱动转盘电机11 带动中心轴9 转动,同时转盘2、内桶10、转架3 和垃圾袋固定盘7跟随中心轴9 转动,将“纸盒”相应的内桶旋转到垃圾桶盖4 扇形缺口的正下方,随之转盖电机5 带动垃圾桶转盖6 转动打开垃圾桶,使用者完成投放垃圾。垃圾桶转盖6 停留5 秒则自动合上,同时,在垃圾袋固定盘7 和内桶10 空隙中安装的红外光电传感器,能够随时监测垃圾堆满的高度,如若垃圾达到规定高度,则会触发蜂鸣器报警,提醒使用者更换垃圾袋,并且垃圾桶转盖6 处于常开状态。更换垃圾袋完成后,红外光电传感器每次间隔两分钟检测一次垃圾堆放状况,如若垃圾未达到规定高度,则会驱动垃圾桶转盖6 闭合,随后内桶也会复位转动到初始位置。
2 智能垃圾桶机械结构设计
2.1 内桶旋转结构设计
图2 为内桶旋转结构,图中转盘6、垃圾袋固定盘3 和转架5 通过法兰盘联轴器4 与中心轴2 连接,中心轴2 通过刚性联轴器1 与转盘电机7 连接,使得转盘电机7 驱动中心轴2 转动时,转盘6、垃圾袋固定盘3 和转架5 随之转动。另外,为了避免中心轴2 在转动时,出现偏离中心的摆动现象,在中心轴2 的另一端通过轴承9 安装支撑垃圾桶盖8 的内侧,垃圾桶盖8 作为固定支撑与外桶固接,实现内桶旋转结构相对外桶和桶盖相对运动。
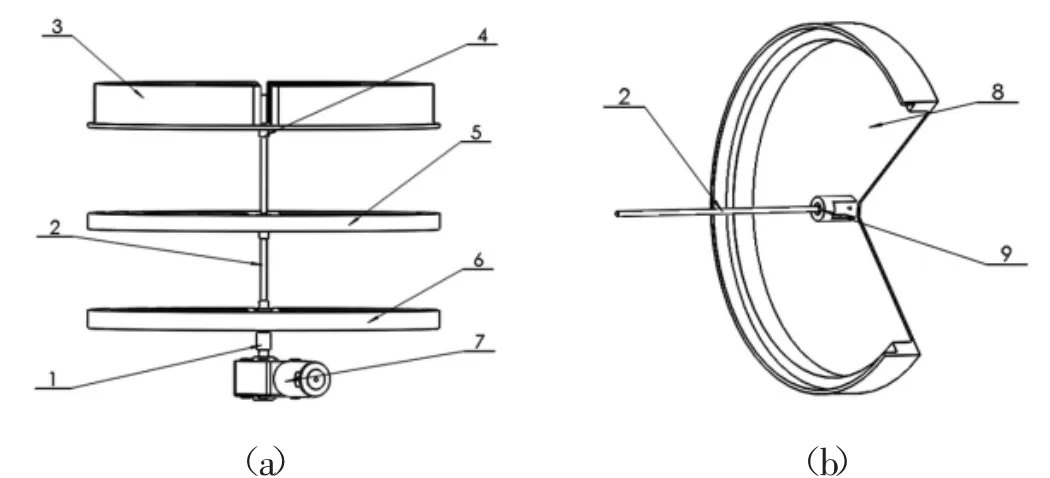
图2 内桶旋转结构
图3(a)为垃圾袋固定盘三维零件模型,垃圾袋固定盘扇形侧边上都设计有类似雪花状的凹槽,更换垃圾袋时,将垃圾袋塞入雪花槽可以起到固定作用,防止投放垃圾时将垃圾袋扯下。图3(b)为转盘三维零件模型,由图2 可知垃圾内桶放置在转盘6 的上面,转盘位于智能垃圾桶底部,不仅支撑着四个垃圾内桶,防止各内桶因为重量不同而发生倾斜,而且带动四个内桶相对外桶同时旋转。另外,为了避免转盘旋转时,内桶发生位移,因此在转盘上开设与内桶形状相似的四个扇形槽,一个内桶定位于一个扇形槽上,且为了转盘在垃圾桶内定位准确,转盘设计为球冠形状。图3(c)为转架三维零件模型,转架为一平板上开设四个扇形通孔的支架结构,扇形孔的形状尺寸大小与转盘上的扇形槽一样,转架的作用在于避免在内桶旋转过程中,四个内桶相互之间以及内外桶之间发生碰撞摩擦,或者发生干涩内外桶旋转的现象,同时也对内桶的位置起进一步定位作用。
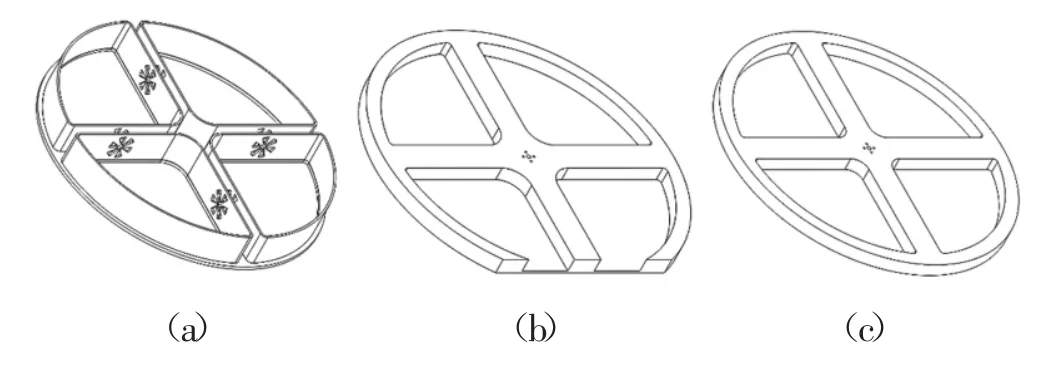
图3 固定盘、转盘与转架
2.2 开合盖结构设计
图4(a)为智能垃圾桶开盖时的状态,图4(b)为闭合时的状态,需要投放垃圾时,语音识别模块会根据语音内容,驱动桶盖电机3 将垃圾桶转盖1 顺时针旋转90 度,垃圾桶转盖1 将重叠在垃圾桶盖2 上方,如图4(a)所示,同时语音识别模块驱动内桶旋转机构,将备投垃圾类型的内桶旋转至图4(a)中扇形缺口的正下方,完成智能垃圾桶开盖和转桶动作。投放结束后,内桶旋转机构将内桶旋转复位,同时桶盖电机3 将驱动垃圾桶转盖1 逆时针旋转90 度,智能垃圾桶恢复合盖状态,如图4(b)所示。该智能垃圾桶采用旋转式开合盖结构,不仅需要的工作扭矩比翻转式开合盖小,而且垃圾桶转盖1 设计面积大于四分之一垃圾桶盖2 的面积,能有效完整地覆盖扇形开口,有效防止垃圾异味扩散到环境中,避免了对家庭环境的影响。
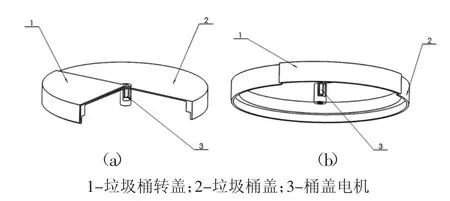
图4 开盖合盖
2.3 垃圾体积检测结构设计
为了能检测内桶垃圾堆放状况,如图5 垃圾体积检测结构所示,在垃圾桶盖缺口的正下方,垃圾袋固定盘2 和内桶1 之间设置红外光电传感器,作为体积检测平面,红外发射端3 安装在垃圾袋固定盘2 上,红外接收端4 安装在内桶1 外壁上,当某个内桶垃圾堆放超过体积检测平面时,光电传感器发送信号给控制中心,控制中心则传递信号给蜂鸣器,蜂鸣器报警提示使用者更换垃圾袋。
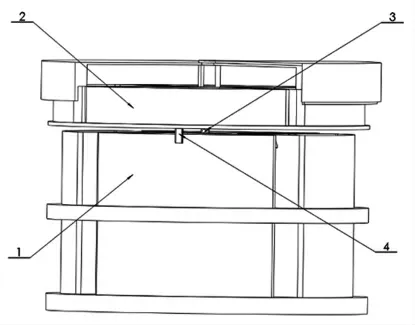
图5 垃圾体积检测结构
2.4 内桶结构设计
图6 为内桶零件三维模型,由于垃圾桶外桶设计为圆柱形,在此基础上,为了使内桶尽量拥有较大的容量来堆积更多的垃圾,因此将内桶设计成扇形结构,且在内桶两直角边设计了两个向内侧凹半圆槽,主要目的是为了清洗时把内桶取出来,可借助两个半圆槽快速取出,增加智能垃圾桶的使用便捷性。
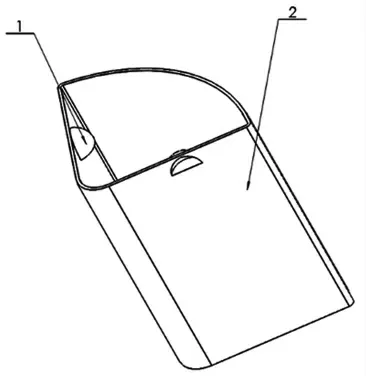
图6 内桶零件三维模型
3 智能垃圾桶控制系统设计
3.1 控制系统硬件选择
本设计采用Arduino UNO R3 为智能分类的系统核心,由红外光电传感器、电源电路、驱动模块、语音模块构成智能分类控制系统,其工作流程如图7 所示。首先对使用者发出的语音进行识别判断,获知垃圾类别,再驱动相应的内桶旋转到垃圾投放口,接着垃圾桶盖旋转打开,使用者投放垃圾,完成投入垃圾后红外光电传感器进行红外检测,判别垃圾堆放高度,按需发出警报提示使用者更换垃圾袋,最后桶盖旋转关闭。
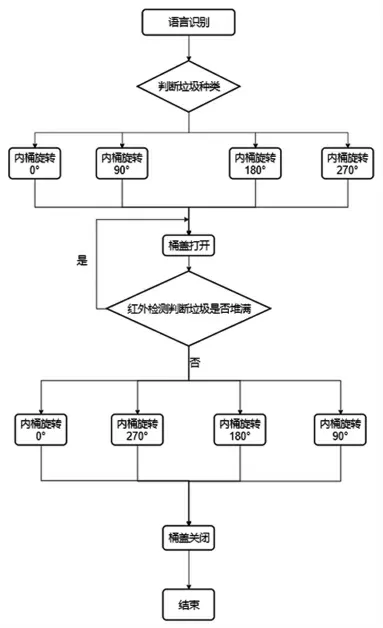
图7 控制系统工作流程
3.2 主控电路设计
本设计主控电路是采用Arduino UNO R3,以Atmega328P 为基础的智能语音分类垃圾系统,实现垃圾桶的语音识别控制垃圾桶的开启关闭,电路输入电压为外部供电的7V-12V 直流电源输入,USB 供电电源电压为5V,电路原理图如图8 所示。
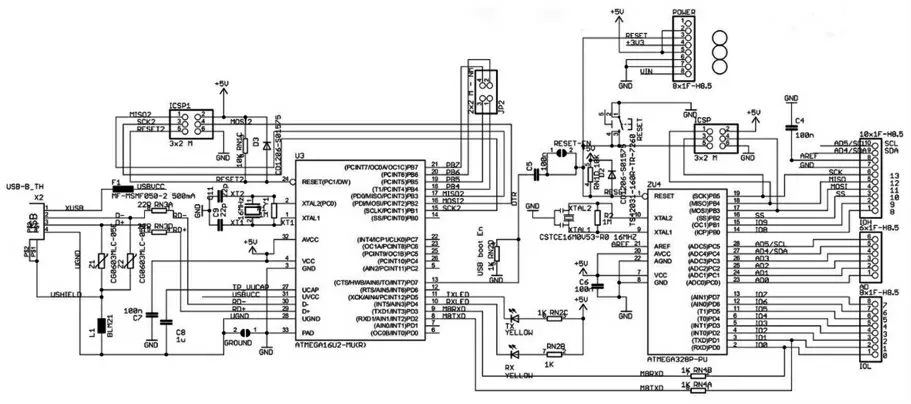
图8 Arduino UNO R3 电路原理图
其中电机和蜂鸣器的接线如图9 所示,两个电机与Arduino UNO R3 连接,GW600-5 涡轮电机接引脚8,同时外接电源;GA12-N20 电机接引脚9,同时也外接电源;在程序中以低电平驱动,以防单片机驱动时,电机所需的电压不足。蜂鸣器则连接引脚11,另一引脚连接电源。
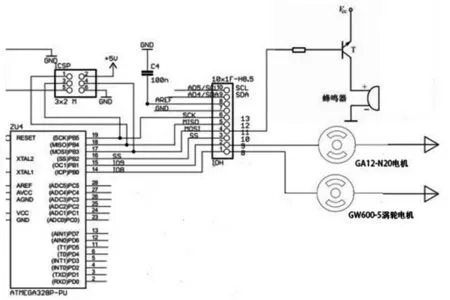
图9 电机和蜂鸣器接线图
3.3 语音识别模块设计
本智能垃圾桶LD3320 语音识别模块由STC11L08XE的主控芯片与LD3320A 的语音识别系统组成,原理图如图10 所示,图10(a)为STC11L08XE 构成主控芯片原理图,图10(b)为LD3320A 构成语音识别系统原理图。该模块需要5V 电源以保证供电稳定,可识别在2.0m 以内的所有普通话,该模块最多可以识别50 条语音,并可接任意单片机。其中STC11L08XE 的RXD 与主控电路的TXD 即引脚0 相连,TXD 连接RXD 即引脚1,如图11 所示。
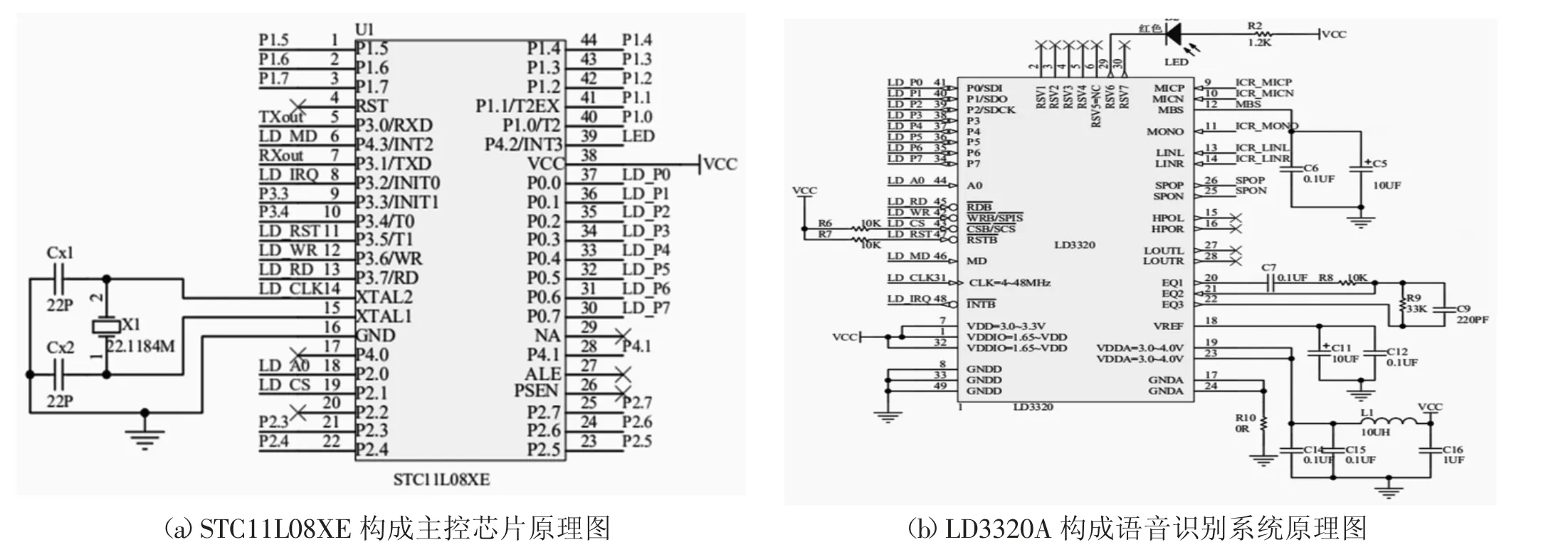
图10 语音识别模块电路原理图
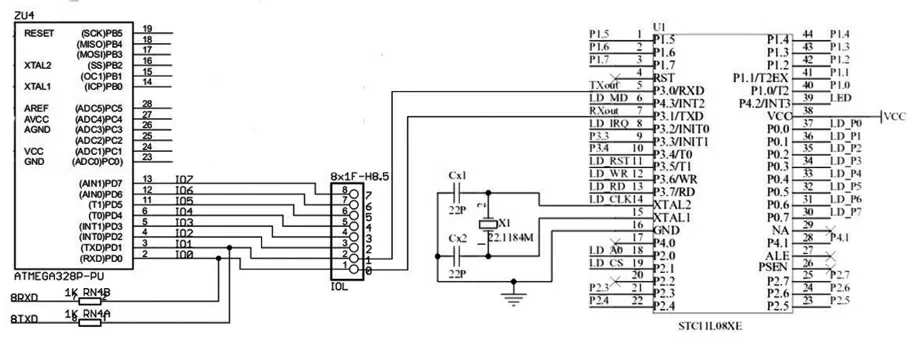
图11 语音模块与主控电路接线
3.4 红外光电传感器
本智能垃圾桶采用红外F3 对射式传感器,可感应2.0-25.0cm 的距离,检测距离可调节,感应时间为2.0 ms,工作电源为4.5V-5.5V,输出电流100.0mA,具有灵敏度高、使用寿命长的特点,其电路原理如图12 所示。图中显示,左边为发射端,引脚1 连接GND,引脚2 连接VCC;右边为接收端,引脚1 连接VCC,引脚2 连接Arduino UNO R3 图9 的引脚10。

图12 红外F3 对射式传感器电路图
3.5 控制系统程序设计
本智能垃圾桶通过语音识别控制垃圾桶盖开闭以及垃圾桶内桶旋转。
首先语音模块的程序设计,设置四个指令,分别为干垃圾、湿垃圾、可回收垃圾、有害垃圾,如下所示:

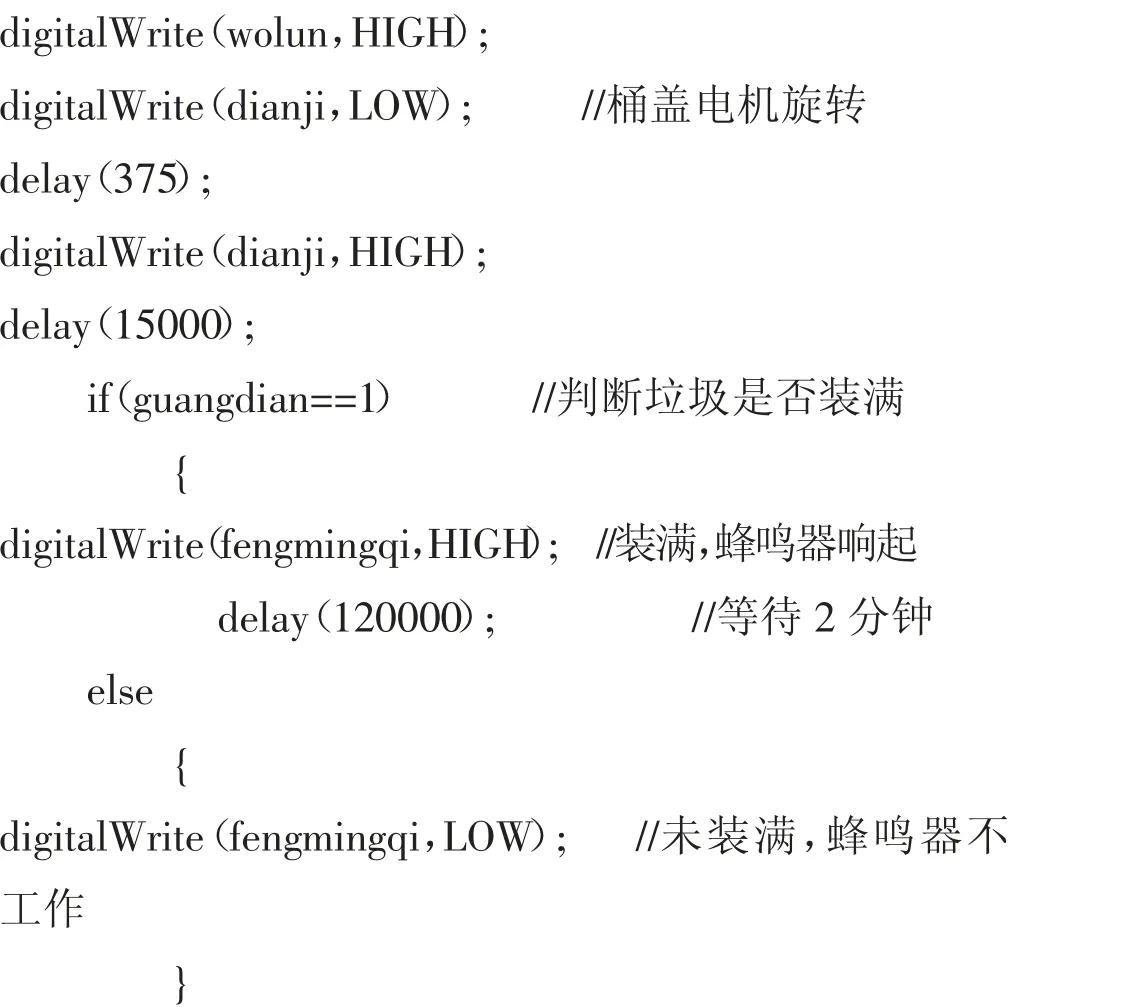
然后是识别后工作程序,以下程序为垃圾桶转盖正下方的内桶假设为干垃圾内桶的情况。当语音模块识别出干垃圾时,内桶不动桶盖旋转,投入垃圾后进行红外检测,若是检测到垃圾堆满则触发蜂鸣器,其他保持原状态。延时2 分钟进行再次检测,如若没有更换垃圾袋,将一直循环,若是检测到内桶未满,垃圾桶盖就会旋转关闭。
4 结束语
本项目研发的新型智能分类垃圾桶主要由内外桶、内桶旋转结构、开合盖结构、垃圾体积检测结构以及控制系统等构成。该垃圾桶通过利用语音识别模块控制垃圾桶盖开启关闭和驱动内桶旋转复位,实现垃圾分类投放,利用红外传感器检测垃圾的堆放体积,警示更换垃圾袋,内桶分为可回收垃圾、有害垃圾、湿垃圾和干垃圾四类,符合我国的垃圾分类标准,该新型智能垃圾桶,不仅结构简单制造成本低,而且使用便捷,适合广大家庭用户的推广使用。
