车载AR导航发展现状与展望
2021-11-05韦旭明魏鹿义冯俊冯辛安黄业欢
韦旭明 魏鹿义 冯俊 冯辛安 黄业欢
摘要:近年来随着汽车行业的快速发展,汽车逐渐从出行工具转变成为用户提供个性化、智能化、场景化的车载服务平台。智能网联已成为未来汽车发展的重要方向,而车载AR导航是当前智能网联技术的重要创新应用。本文阐述了车载AR导航相关概念及特点,对其发展现状以及存在的问题进行了多方面分析,最后对车载AR导航技术未来的发展前景进行展望。
关键词:车载AR导航;增强现实技术;智能网联
中图分类号:U463 文献标识码:A
0引言
近年来随着汽车行业的快速发展,汽车逐渐从出行工具转变成为用户提供个性化、智能化、场景化的车载服务平台,车载AR导航是其中最为重要的车载服务功能。本文首先从车载AR导航发展现状进行阐述,以地图服务提供商、汽车厂商、车联网服务提供商为重点,分析当前的发展现状。再结合实际应用情况,阐述环境实时感知、车道级高精定位、道路数据精细化方面的关键技术。最后从用户体验、产品媒介、市场应用方面,提出对车载AR导航发展前景的展望。
1车载AR导航相关概念阐述
1.1增强现实技术
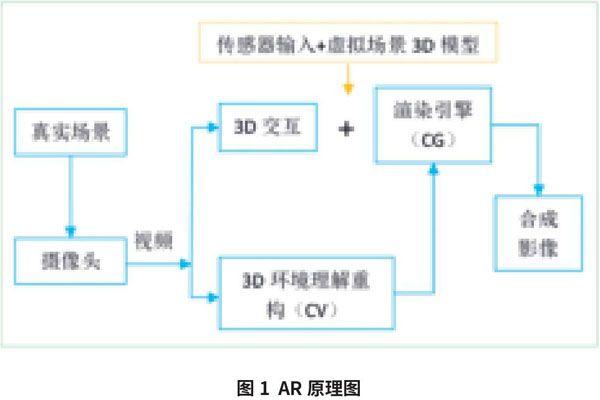
增强现实技术(Augmented Reality,简称AR),是通过终端摄像头将真实场景进行数据采集,以视频格式传输到设备内部处理器,对其进行检测、分割、识别与追踪,实现3D环境理解重构(CV)。系统再通过终端的传感器和陀螺仪等实时更新现实环境三维空间的数据变化,从而计算出真实环境与虚拟环境的相对位置数据,然后对真实环境与虚拟环境进行融合、渲染(CG),最终将合成后的影像输出到终端显示(图1)。终端用户可利用具备采集控制信号的交互设备进行人机交互和信息显示更新,实现增强现实的交互操作。
1.2车载AR导航
车载AR导航是通过车载摄像头将前方的道路环境进行数据采集,再将车辆的当前定位、地图导航元素以及视觉识别结果进行融合计算。最后,系统将渲染完成的虚拟AR导航指引元素叠加到实际道路上,给驾驶员真实的导航界面,并实时呈现直观3D导航指引。
2车载AR导航发展现状及存在问题
2.1发展现状
车载AR导航作为当前最为重要的车载服务功能,目前国内外的地图服务提供商、汽车厂商以及车联网服务商等都相继参与其中。下面分别阐述他们在车载AR导航技术的发展现状。
2.1.1地图服务提供商在车载AR导航的发展
谷歌是国外最先开始涉足车载AR导航的企业之一。2018年5月,谷歌首次展示带有AR导航功能的Google Maps,能实现在图像上叠加3D箭头为用户指引方向。高德地图是国内最先实现多场景使用车载AR导航的地图商,凭借多年积累的专业交通大数据以及先进的智能图像识别技术,能为驾驶员提供变道预警、跟车预警和压线预警等安全辅助驾驶功能。
2.1.2汽车厂商在车载AR导航的发展
2020年9月,梅赛德斯-奔驰发布了全新奔驰S级桥车。该车搭载了一套AR实景导航系统,通过获取车身环境传感器、GPS、地图以及驾驶动态数据等,以虚拟图像的方式投射给驾驶员。2018年4月,上汽荣威发布了MARVELX智能电动SUV。此款车型搭载AliOS与斑马网络开发的AR导航,不仅可以显示当前车速、行车信息和实时道路等信息,还可以根据当前道路交通状态为驾驶员提供安全辅助驾驶预警功能。
2.1.3车联网服务商在车载AR导航的发展
2019年9月,四维图新旗下四维智联、疆程和京东方联合推出了AR-HUD导航产品。该系统视场角11°×4°,成像距离9m,采用光线自适应技术自动适配白天和夜晚光线亮度,对曲面挡风玻璃光路设计实现稳定清晰的投射画面。同时,系统可对投射区域进行调整,以满足不同驾驶员不同身高的使用要求。2020年9月,腾讯发布AR实景导航,通过精准定位技术将导航指引元素精确叠加到真实道路上,实现行人、车辆和视线盲区预警等功能。该系统可结合场景预判用户个性化ID,针对性浮现给用户感兴趣的服务,连接相应场景动态信息,如餐饮、加油、充电、停车和购物等。
2.2存在问题
2.2.1体验效果
(1)在成像质量方面,由于车载AR导航对实时性要求非常高,现阶段的车载AR导航系统往往无法实现对行驶的周边环境进行快速识别。因而在实际体验效果中,成像实时性存在延迟,不够精准和稳定,且在复杂室外光照下会影响图像清晰程度。
(2)在视觉角度方面,主流车载AR导航应用媒介包括仪表、中控屏、智能后视镜、前挡风玻璃和HUD透明背板。对于AR-HUD,挡风玻璃离驾驶视线近,呈现信息区域大,但实际显示的影像不够清晰。且AR-HUD是通过虚拟影像与真实道路融合实现,随着驾驶员角度发生变化,会导致出现虚拟的导航指引信息与真实道路没有精准贴合。另外,中控屏和智能后视镜都相对较远,且后视镜屏幕略小,视觉效果不佳。
(3)在流程操作和功能需求方面,操作流程比较繁琐,功能需求单一,在功能开发场景上缺少更多应用场景。
2.2.2软硬件能力
(1)在数据储备方面,开发AR导航需要有丰富的地图数据储备,道路交通数据不仅要求有千万级的公里数,还需要包含各类复杂的道路状况,要覆盖各类道路属性信息。目前只有少数地图服务商(高德和百度)可以在部分城市满足如此海量的道路交通数据,其他厂商基本难以在短时间内积累如此丰富的道路图像数据,来实现车道级导航能力。
(2)在软件技术方面,AR导航软件层面涉及到图像识别、虚拟融合算法和地图数据等多方面综合技术。目前对于处理复杂多变的道路环境,除了拥有全球领先的图像智能检测与识别能力的企业(如谷歌、阿里和百度等),对图像识别的准确度、速度以及AR算法灵敏度等可以達到要求,其他厂商都难以实现,导致在产品体验上普遍较差。
(3)在硬件性能方面,车载AR导航不仅需要极大的计算资源,同时还需要保证系统运行的稳定性。当前大多数车载设备的硬件性能普遍不高,导致系统在做图像识别以及数据融合算法时,处理速度和准确性上受到影响,也无法保证系统运行的稳定性。
3车载AR导航关键技术
3.1环境实时感知
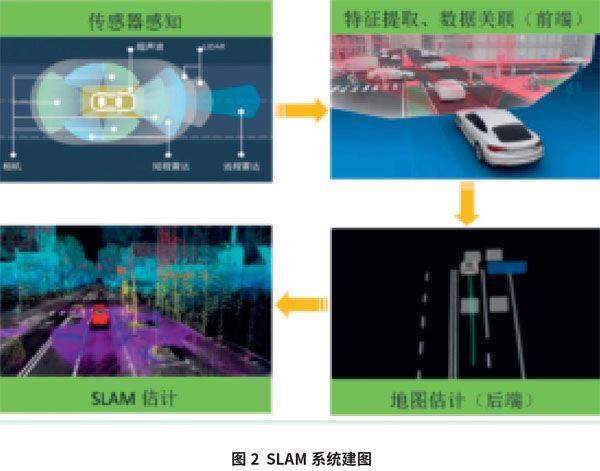
对环境实时感知,采用视觉算法技术感知周围环境。视觉算法是高精度地图构建的核心技术,应用在图像识别、精度保证、地图数据自动化生成、视觉定位以及高精地图更新,可提供高精度定位和场景语义理解等,这是AR导航功能实现基本能力。SLAM(Simultaneous Localization And Mapping)系統构图是最为典型的即时定位与地图构建方法。系统是由前端和后端两部分组成,通过终端传感器感知,前端进行特征提取、数据关联,到后端进行优化估计,进而得到具有全局一致性的地图,最后得到整体的SLAM估计(图2)。
3.2车道级高精定位
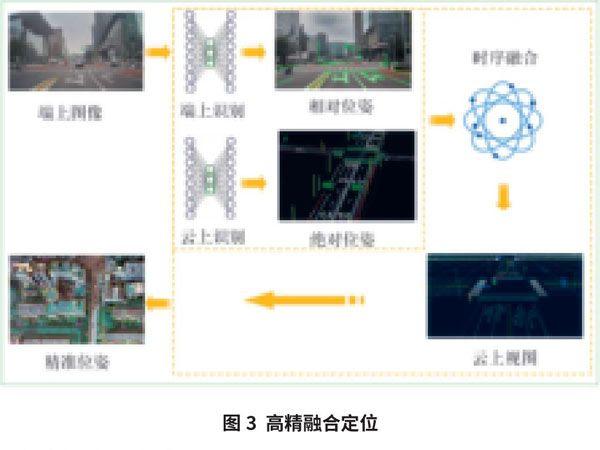
车载AR导航需要车道级高精定位,而车载终端和云端数据实现一体化精准视觉定位是关键的技术之一。如图3所示的高精融合定位图,系统通过车载终端对车道线、道路边沿和交通指示牌等标识进行识别,计算车辆的相对位姿。再结合云端大数据利用神经网络计算出车辆的绝对位姿,经过端和云的时序融合成云上视图,最终得到更为精准的位姿。
3.3道路数据精细化
实现车载AR导航,不仅需满足对周边环境实时感知以及车道级高精定位,还需做到道路数据精细化。在标准精度道路数据基础下,可以采集更为全面的道路属性信息,并通过对采集的道路场景进行切分、建模,构建高精度的道路数据模型,以此建立起的道路三维模型可以真实反映出现实场景。与此同时,利用地图导航规划引导信息,结合从真实道路图像提取的特征数据以及融合精准的位姿,在不同道路场景构建不同的引导线模型。因此构建高精度的道路数据模型算法以及不同道路场景引导线模型算法,是车载AR导航关键的技术之一,这也是实现高精度道路数据低成本、高覆盖的关键点。
4车载AR导航发展展望
4.1用户体验
车载AR导航的用户体验在于能为用户提供精准的导航信息。当用户需要时,系统能够及时推送出有用信息,做到简洁高效,不对用户造成干扰。系统要与用户有交互性,在用户获取信息后,能够根据用户需求反馈给用户相应结果,也可根据用户个性化特点,针对不同场景,呈现给不同用户以不同的兴趣服务。同时操作流程简便,能进行无缝连接,让用户体验到一种自然、顺畅感。
4.2产品媒介
车载AR导航主流产品媒介是仪表、中控屏、智能后视镜以及HUD等,从影响用户体验的关键因素分析,AR-HUD拥有最好视场角和最好成像距离,目前受制于技术、成本等多方面原因,未能在汽车上得到大规模普及。但随着视场角、成像距离和光路设计等核心技术取得突破,以及产品成本下降到合理区间,AR-HUD将会是未来车载AR导航的主流产品媒介。
4.3市场应用
目前市场上搭载AR导航系统量产车型只有少数几款,并没有形成产品规模化。随着本土智能网联企业快速成长,能够提供成本更低的解决方案。未来AR导航会加快进入汽车的前装市场,逐渐成为汽车基础功能。通过汽车厂家、地图服务提供商、车联网企业以及智能设备商的相互合作,将共同推动这一项创新技术在市场上规模化应用。
5结束语
近年来,随着汽车行业的快速发展,汽车逐渐从出行工具转变成为用户提供个性化、智能化、场景化的车载服务平台,而车载AR导航也是其中最为重要的车载服务功能。本文从当前车载AR导航应用现状分析,总结地图服务提供商、汽车厂商和车联网服务提供商在车载AR导航开发应用现状。从产品应用存在的问题以及相关的核心技术分析,阐述了当前车载AR导航在体验效果、软硬件能力和成本控制方面存在的问题,以及开发AR导航需要突破对环境实时感知、车道级高精定位、道路数据精细化的技术能力。最后从用户体验、产品媒介和市场应用进行了展望,提出了笔者对未来车载AR导航应用思考。
作者简介:
韦旭明,硕士,助理工程师,研究方向为信息显示系统开发。
