一种自适应平滑滤波算法
2021-11-05郑州联睿电子科技有限公司马琳琳
郑州联睿电子科技有限公司 马琳琳 李 冀 肖 岩
本文提出了一种基于sigmoid函数的自适应平滑滤波算法。该算法根据定位目标的运动特性,自适应地改变滤波器的权重,在平滑的过程中较好的解决了定位目标运动、静止对滤波要求的矛盾。实验结果表明,该算法具有良好的平滑滤波性能,尤其是对定位目标静止时平滑效果尤为明显,而且算法简单,易于实时处理,可广泛应用于无线定位系统中定位目标的轨迹平滑。
随着无线定位技术的发展,室内定位导航技术受到越来越多人的关注。相比于室外卫星定位导航技术,室内定位导航应用的范围较小,定位精度较高,但是由于无线信号传输的不稳定性及多径效应等问题,单纯采用无线定位技术解算得到的定位点变化方差大、移动不平缓,从而严重影响了室内定位系统的定位性能和稳定性。
目前常用的轨迹平滑滤波算法有:中值滤波、均值滤波、限幅滤波等,其中中值滤波、限幅滤波对较大的抖动点有显著的平滑特性,均值滤波虽然对较小的抖动点有平滑特性,但是会影响定位目标的运动特性,不能很好的保留定位目标的运动特征信息。
本文通过分析定位目标的运动特征,以运动特征为参数采用sigmoid函数计算权重,实现定位点的平滑滤波,尤其是静态定位点的平滑滤波。
1 sigmoid函数简介
Sigmoid函数是一个在生物学中常见的S型的函数,也称为S型生长曲线,是BP神经网络中常用的非线性作用函数,由下列公式定义:

其函数曲线如图1所示。
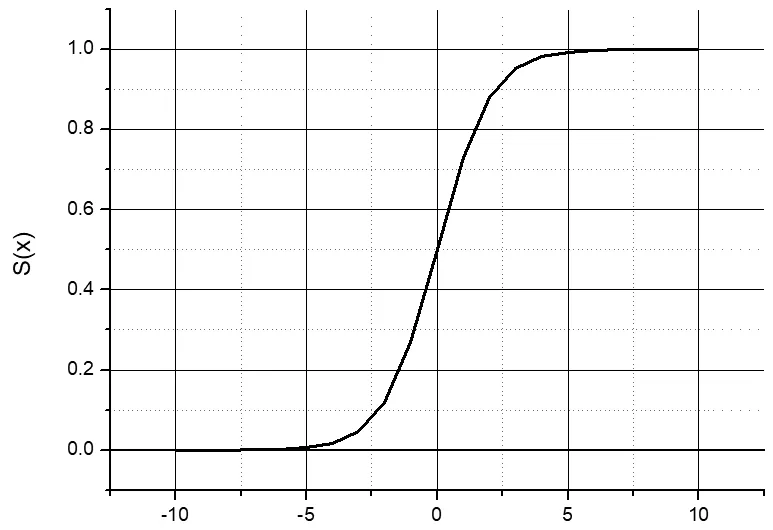
图1 sigmoid函数曲线
满足的性质:
(1)对称性,关于(0,0.5)中心对称;
(2)值域在0和1之间。
在信息科学中,由于其单调递增以及反函数单调递增等性质,Sigmoid函数常被用作神经网络的阈值函数,将变量映射到0,1之间。
2 基于sigmoid函数的自适应滤波平滑算法
2.1 自适应滤波平滑算法原理
利用定位目标的速度值动态调整权重来适应不同的运动状态:当速度小时,历史数据的权重较大;当速度大时,当前数据的权重较大。通过上述的处理,从而实现静止点的收敛稳定。

其中,k为定位序号,v(k)为当前定位点推算的速度值,w(v(k))为以速度值为参数的权重计算函数。
2.2 基于sigmoid函数的权重函数构造
标准的sigmoid函数的值域为[0,1],满足权重的要求,但是如何将速度值映射到该值域是重点考虑的问题。以室内定位系统常用于定位的目标-行人为例,进行说明。考虑到行人运动的速度,及运动、静止平滑效果的折中权衡,选择0.5m/s为权重1/2的映射点,则sigmoid函数偏移处理后的表达式为:

2.3 自适应滤波算法的实现
基于sigmoid函数的自适应平滑滤波算法的步骤为:1)根据连续两次的定位点及定位时间间隔推算定位目标的运动速度;2)由运动速度计算权重;3)根据权重计算本时刻定位点的平滑滤波结果。
3 实验结果与分析
在验证试验中,我们采用联睿电子研发的U-Loc室内厘米级实时定位系统进行数据的采集,然后利用本文的算法分别对静点及动态定位点的平滑滤波性能进行分析对比。
图2所示为静点的平滑滤波效果,通过对比可以明显看出滤波后的定位点更加集中,稳定性更高,表1中统计的每个坐标轴的标准差进一步验证了该结论。
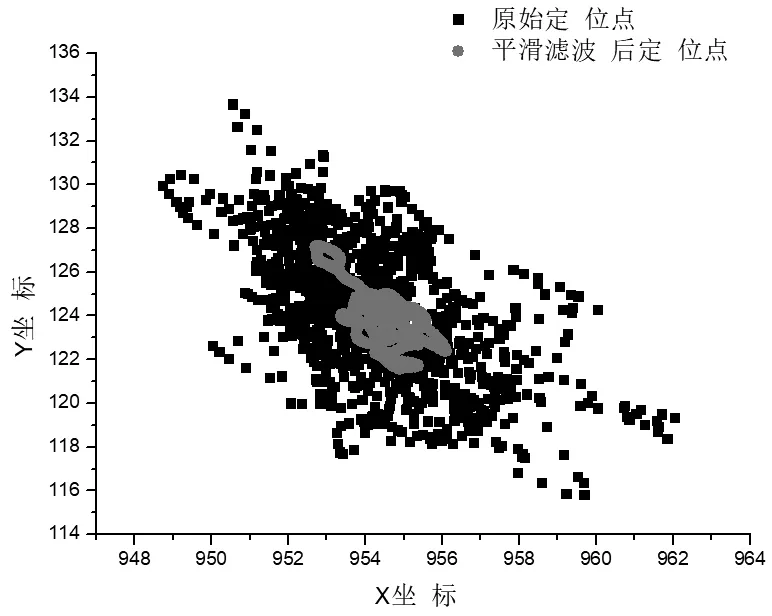
图2 静点的平滑滤波效果对比
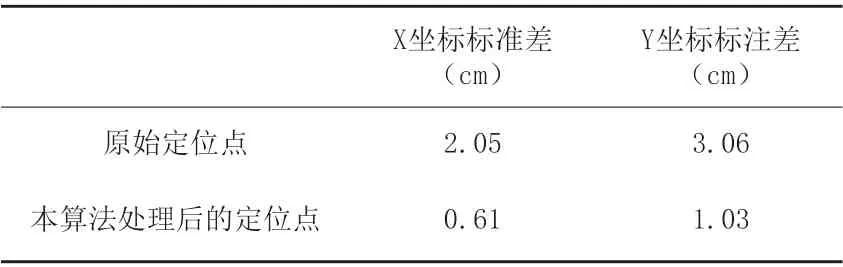
表1 定位点坐标值的标准差
图3所示为动态定位点的平滑滤波效果,可以看出:动态定位轨迹也具有明显的平滑效果,验证了该算法的有效性。
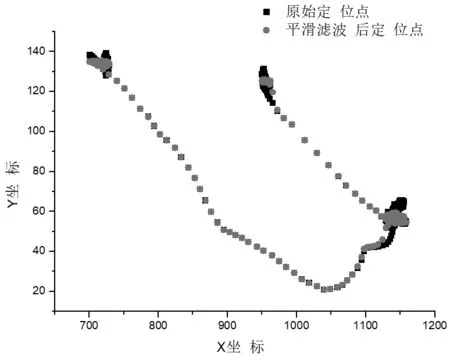
图3 动态定位点的平滑滤波效果
本文讨论了一种基于sigmoid函数的自适应平滑滤波算法。该滤波算法利用sigmoid函数将速度值映射为平滑滤波的权重,可以实时根据速度大小自适应调整滤波权重。实验结果表明,算法具有明显的平滑滤波效果,尤其是对静态定位点的平滑效果较明显,且本算法处理简单,满足室内定位实时性的要求。
