一种开闭链式康复机器人的机构设计与仿真
2021-11-05牛玉荣张方双
牛玉荣,张方双,杨 科
1.安徽文达信息工程学院机械与汽车工程学院,安徽合肥,230000;
2.合肥工业大学机械工程学院,安徽合肥,230000;
3.合肥辩日医疗科技有限公司,安徽合肥,230000
我国的人口老龄化问题日趋加剧。据统计,截止到2016年末,60岁及以上的老年人有2.3亿,占我国总人口的16.9%[1]。另外,据专家预测,至2035年我国老年人口将达到3亿;至2050年老年人口将超过4亿,占中国总人口的30%以上。导致60岁及以上老年人肢体残疾的因素包括脑血管性疾病、骨关节疾病、意外伤害和其他原因,其中脑血管疾病的致残率最高[2]。研究表明,大脑存在着一定的可塑性,进行运动功能训练更利于脑源性神经生长因子、神经突触蛋白和胰岛素样生长因子的表达[3]。故运动功能训练一直以来都是功能恢复的重要康复手段,能有效改善患者运动功能。科学规范的康复治疗及训练也是降低患者肢体致残率和提高其生存质量最有效的方法[4]。
一直以来医院和康复机构是患者进行康复训练的主战场,但其容纳规模越来越难以满足日益增多的患者。另外,随着人民经济水平提高,越来越多患者选择回归社区和家庭进行康复治疗。因此,研究适合社区和家庭使用,且能够为患者提供个性化、精细化康复训练的下肢康复机器人具有一定的远景。
1 康复机器人的机构设计
1.1 人体步态运动轨迹的确定
步态分析能客观且定量地反映患者步态是否异常,是康复理疗师进行康复评定的重要组成部分[5]。为了使机器人模拟实现正常人体下肢步态轨迹,满足康复评定的需要,应该对步态进行分析[6]。由表1可知,髋、膝关节在矢状面都是作屈曲和伸展运动,这两种运动方式比较直观地体现在关节活动度的变化。

表1 下肢关节活动度
踝关节的主要功能是为身体主动运动提供能量支持。它是人体承受重量最大的关节,也是实现下肢运动功能的重要关节,故选择踝关节的运动轨迹作为步态的主要研究对象。
1.2 人体步态轨迹数据采集
不同人或同一人的步态轨迹受其自身主观意念、个人身体条件以及客观环境等因素的影响存在差异性,步态特征参数值不会完全一样。研究表明,人体行走时的步态轨迹与坐姿状态下蹬腿时踝关节的运动轨迹,形状相似,都为类椭圆[7]。为取得相对客观且准确的实验值,选取20名20~28岁实验者,选取标准如表2所示。
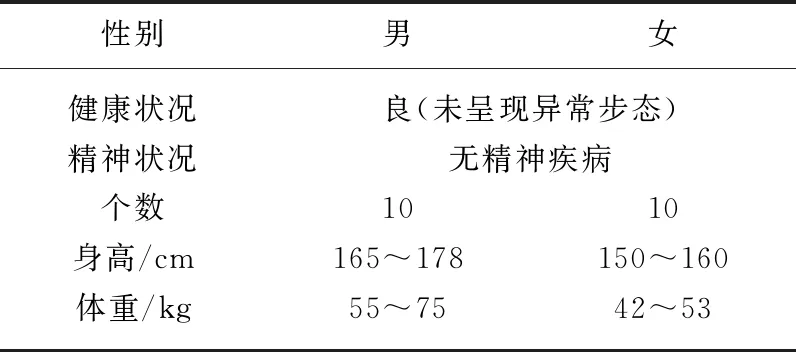
表2 实验者参数
应用Xsens Moven惯性传感器运动捕捉系统,对人体站姿行走前进及坐姿蹬腿顺时针时踝关节的轨迹和髋、膝和踝关节角度进行采集,再应用MVN Studio系统进行数据分析。
1.3 人体步态规律分析
人体步态运动属于空间三维运动,髋、膝、踝关节运动轨迹也均为空间曲线,但人体主要运动和能量消耗都集中于矢状面,故选择矢状面进行分析。惯性捕捉系统的采样频率为120 HZ,也即是获取两个相邻数据的时间差为1/120秒。数据经过处理后可得到实验者的各个位移点。规定X轴为实验者的矢状轴方向,即实验者行走的前进方向,Y轴为实验者的额状轴方向,Z轴为实验者的垂直轴方向,测量数据定义在XOZ轴。以棍棒图的形式显示某一实验者单侧下肢髋、膝、踝关节在矢状面内的运动,如图1所示。

选取其中一名大腿长度为465 mm,膝踝关节间小腿长度为369 mm的实验者右侧肢体髋、膝和踝关节在矢状面内的运动信息,绘制一个步态周期内的髋、膝和踝关节角度拟合曲线,如图2(a)所示。将上述棍棒图中的髋关节移动至一点后,绘制如图2(b)所示的一个步态运动周期的踝关节运动闭合曲线。从上述20名实验者中选取4名实验者,分别满足女K5,K50,男K50、K95的腿长标准,《中国成年人体尺寸》标准GB/T10000-1988,绘制出如图2(c)所示的站姿行走对应的踝关节运动轨迹及如图2(d)所示的坐姿蹬腿对应的踝关节运动轨迹。
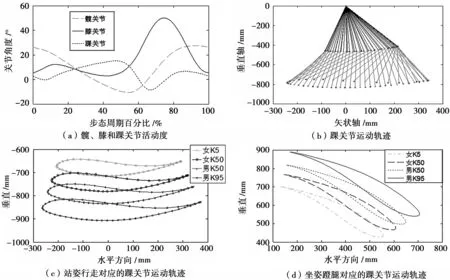
图2 正常步态轨迹图
由图2(a)可知,人在行走和坐姿蹬腿过程中,右侧下肢髋、膝关节在矢状面的运动有一些特征:
在一个步态周期内右侧髋关节只完成一次往复运动;髋关节活动度最大值出现在摆动相内右脚跟着地前的时候,最小值出现在支撑相内右脚跟离地时刻;行走时关节活动度的正向幅值大于反向幅值。
在一个步态周期内右侧膝关节则完成两次往复运动;膝关节活动度最大值出现在摆动相内右脚尖离地至右脚跟着地期间,最小值大约出现在右脚跟着地时刻;行走时的关节活动度始终大于零度;膝关节的关节角度变化范围比髋关节的大。
在一个步态周期内右侧踝关节也完成两次往复运动,且运动幅值不等;踝关节活动度最大值出现在支撑相右脚跟离地的时刻,最小值出现在摆动相内右足脚尖刚离地的时刻。
由图2(b)可知,步态实验表明了踝关节在一个步态周期内的运动轨迹为类椭圆形状。该椭圆前端 “肥圆”,后端“细尖”。
由图2(c)可知,人体步态轨迹均类似,只是其幅度因腿长的不同存在差异。不同腿长的人的踝关节运动闭合曲线可近似认为是等比例变化的,也即是随着腿长变化的是踝关节运动轨迹的幅度,其形状基本可视为无变化。
由图2(c)(d)知,坐姿状态下的人体下肢蹬腿的步态轨迹与行走的步态轨迹都为类椭圆,形状基本类似,只是存在一定的角度旋转关系。
1.4 康复机器人的机构设计
坐姿蹬腿状态下的踝关节运动轨迹如图2(d)所示,故将实现上述不同幅度的类椭圆轨迹作为下肢康复机器人机构设计的依据。该机器人设计成坐姿足底驱动式,机器人的末端,也即是脚踏转动中心的运动轨迹为类椭圆。
单自由度的康复机构运动轨迹过于单一,而平面五杆机构可实现平面内任意轨迹,故本文采用多自由度的平面5R机构。上文步态规律表明,不同腿长的人的步态轨迹基本上是等比例变化的,故应在康复机器人执行机构的末端串联一个等比放大/缩小机构以适应腿长差异。
如图3所示,建立平面直角坐标系XOY,OA为曲柄,由常速电机驱动;DC为调整杆,由伺服电机驱动;AF为连杆;BC为摇杆;OD为机架;F点为执行机构末端与脚踏的铰接点。人把脚放在脚踏上,将踝关节的位置近似看作是脚踏与执行器末端的铰接点。将五杆机构对称布置在座椅两侧,调整杆与竖直方向夹角可通过伺服电机进行调节,进而得到不同的类椭圆轨迹。

图3 康复机器人执行机构
通过仿真,仅仅调节α0并不能达到使轨迹曲线等比例变化的目的,故需要在五杆机构末端添加一个等比例调节机构。
针对上述分析结果,以闭链混合驱动五杆铰链机构作为基础构件,再串联二级杆组构成了双自由度七杆混联康复执行机构,然后在五杆机构的连杆末端串联一个开链式五杆等比可调机构,构成了七杆机构与等比可调机构混合的开闭链式康复训练机构,如图4所示。
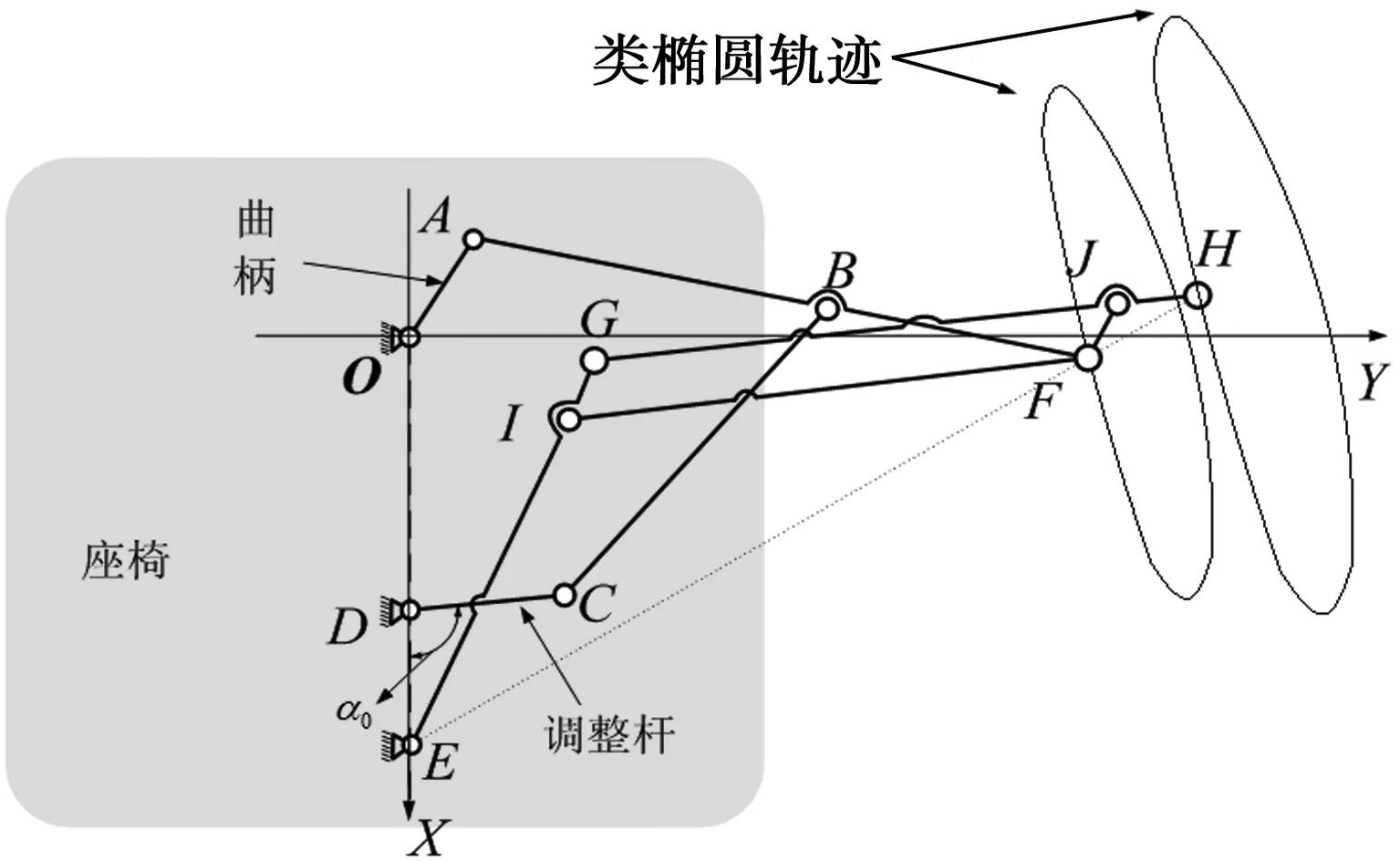
图4 训练机构简图
本文在确定康复机器人执行机构的七杆尺寸参数时,首要考虑的是该七杆机构的下肢末端脚踏点必须能实现最小幅度的运行轨迹,也即身高矮小者K5百分位(身高1 484 mm,上臂长262 mm,前臂长193 mm,大腿长402 mm,小腿长313 mm,眼高1 371 mm,肩高1 195 mm,肘高899 mm,手功能高650 mm体重42 kg)对应的踝关节类椭圆轨迹。然后再通过等比可调机构对轨迹幅度进行等比放大。确定的七杆机构尺寸参数如下:OA=95 mm、AB=310 mm、BC=364 mm、CD=145 mm、DO=150.42、AF=610 mm、杆PQ=200 mm、杆QT=300 mm、杆TW=500 mm。确定满足K5百分位人体步态规律探索出所需的步态轨迹的机构尺寸如下:EI=360 mm、EG=400 mm,JF=IG=30 mm,IF=GJ=500 mm,E、F和H三点共线。通过几何关系:lEG/lGH=lEI/lIF=lJF/lJH,可以求出lJH=1 500/37 mm。
2 运动仿真
将人体放于康复训练机中形成一个完整的系统,通过调节康复训练机实现规划轨迹,可得出关节运动规律,从而可实现“人机合一”。建立人机三维模型,然后经过Keyshot软件渲染后如图5所示。

图5 人机三维模型
研究在运行轨迹的过程中患者关节的运动学参数(踝关节运行轨迹和膝关节活动度、角速度、角加速度)及动力学参数(关节受力和力矩)有助于量化训练目标,为临床评定康复效果提供参考。根据人体解剖结构,膝关节作为下肢主要关节,是最易受损伤的关节之一[8],故本章主要讨论被动训练模式下实现踝关节运行轨迹的时的下肢膝关节运动情况。
根据康复机构尺寸参数及腿长参数,在Solidworks中建立三维模型,然后倒入Adams中进行仿真。K5百分位女子的腿长较短,建模分析时应将髋关节向前移动50 mm,以保证仿真分析正确进行。建立好约束后,给曲柄添加一个30°/s的逆时针旋转速度,设置仿真时间为12 s,步数为400步。另外,为简化模型,将大小腿定义成刚体,参考人体密度,将大、小腿密度设置为1.06 g/cm3。将机构杆件材料设置成304不锈钢,质心位置设置为材料中心。
基于上述环境,当实现一个闭合的踝关节运行轨迹时,输出K5百分位人群腿长对应的膝关节的角度、角速度和角加速度曲线。
由表1可知,膝关节在矢状面内的参考运动范围为0~135°。如图6所示,K5百分位女子的膝关节活动范围约为:65°~131°,在人体关节正常活动范围内。
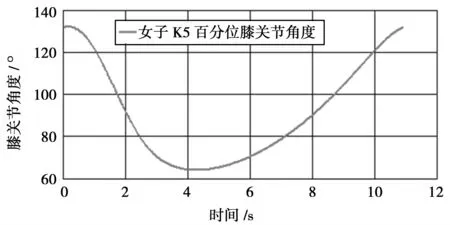
图6 K5百分位女子的膝关节角度曲线
膝关节角速度反映的是单位时间内膝关节角度的变化,膝关节角速度越大,说明单位时间内膝关节角度变化就越大。由图7可知,K5百分位女子的膝关节角速度波动范围为:-12.5°~32°,速度变化均匀,峰值出现在2 s时刻。在7 s~9 s内,膝关节匀速运动。在康复训练中,等速训练能测定患者肌力,起到定量评估肌肉的作用[9]。

图7 K5百分位女子的膝关节角速度曲线
由图8可知,K5百分位女子膝关节角加速度的变化范围为:-19°/s2~20°/s2,两个峰值分别出现在刚开始运动的0~1 s内及3~4 s内。关节角加速度越大,也即是单位时间的关节角速度越大,对患者关节造成二次损伤的几率也相应地越大。因此,在实际训练过程中患者应特别注意角加速度峰值过大的时刻,避免发生二次损伤。
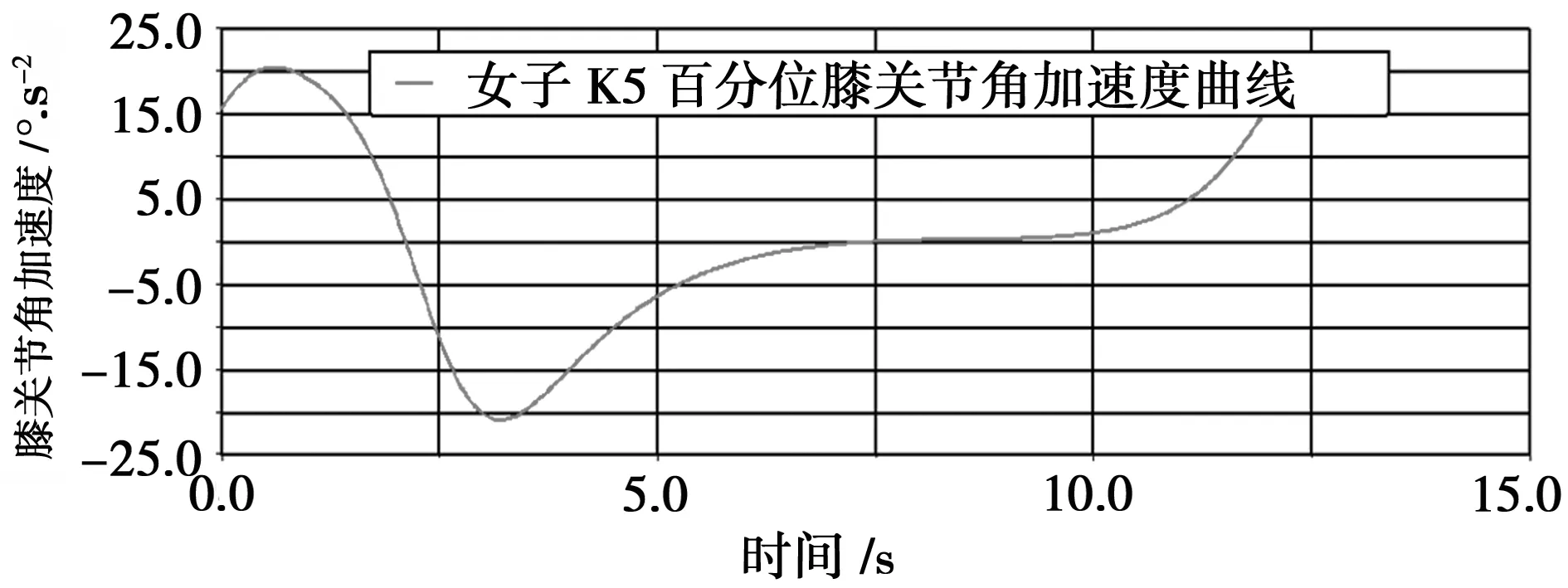
图8 K5百分位女子的膝关节角加速度曲线
3 结 语
本文通过对人体步态轨迹的分析和数据采集,得知坐姿状态下的人体下肢蹬腿的步态轨迹与行走的步态轨迹都为类椭圆,形状基本类似,只是存在一定的角度旋转关系,而且不同腿长的人的踝关节运动闭合曲线可近似认为是等比例变化的。然后对七杆机构与等比可调机构混合的开闭链式康复机器人进行了机构设计,并建立了人机模型,并对膝关节进行运动学仿真分析。通过分析人机模型中膝关节的角度曲线、角速度曲线及角加速度曲线,为患者进行康复训练提供参考,同时也为康复治疗师评定康复效果提供依据。