考虑延迟的汽车线控转向系统自适应内模控制
2021-11-05刘文通
刘文通, 陈 俐, 陈 峻
(上海交通大学 动力装置及自动化研究所;海洋工程国家重点实验室,上海 200240)
线控转向利用电子线路取代从方向盘到转向执行器之间的机械连接,具有结构紧凑、布置方案灵活且更易于实现集成控制等优点,是自动驾驶汽车实现路径跟踪与避障避险的关键技术之一[1-2].但是,由于信号传输、转向执行机构中机械间隙、摩擦等原因,线控转向系统存在响应延迟.延迟使得控制系统的调节时间变长、超调量增大,严重时甚至能引起振荡或失稳[3].此外,延迟时间会随着不同系统的结构、老化程度和通信负荷等发生变化.为了改善线控转向系统的动态性能,有必要设计对延迟具有自适应补偿效果的控制策略.
近年来,线控转向系统中的延迟问题逐渐引起关注.文献[4]的研究表明,当网络传输延迟大于一个通信周期的概率超过10%时,将引起线控转向系统功能失效.文献[5-6]发现当延迟大于50 ms时,采用比例微分控制的线控转向系统会发生失稳.为了消除延迟对线控转向系统转角跟踪性能的影响,文献[6]针对转向执行系统的固定延迟,提出基于 Lyapunov渐近稳定性判定方法确定转角跟踪的反馈增益.文献[7]针对方向盘与转向执行系统之间的不确定有界信号的传输延迟,设计模糊反馈增益,以保证系统的渐近稳定性.这些方法局限于固定或有界延迟,不适用于时变、界限未知的线控转向系统的高精度转角跟踪.
内模控制(IMC)具有对偶稳定性、理想控制器特性和零稳态偏差特性[8],对模型误差具有一定的稳健性和较强的抗干扰能力[9],内模控制能较好地减弱延迟的影响[10].自适应内模控制(AIMC)可随着系统参数时变而自动调整增益,提高跟踪精度[11].然而,延迟是非线性环节,给自适应内模控制的实施带来了困难.一方面,难以对延迟进行高精度辨识,比如近年来基于模型的最小二乘法[12]和梯度下降法[13],以及模型无关的阶跃响应法[14]和相关分析法[15]等研究采用较复杂的算法试图提高辨识精度;另一方面,内模控制的逆控制器需要对被控对象的名义模型求逆,并据此设计滤波器,延迟环节为逆控制器和滤波器的设计带来诸多不便.因此,一些研究在逆控制器求解时不得不将延迟环节摒弃.文献[16]采用的最速下降法、文献[17]采用的人工神经网络来辨识时变延迟,虽然获得了含延迟的名义模型,但是延迟环节信息并未用于逆控制器的设计,故未能严格实现内模控制理想控制器特性和零稳态偏差特性.
对延迟环节进行线性近似,可以克服非线性环节导致的内模控制的设计障碍.文献[18]采用的Pade近似、文献[19]采用的Taylor近似都是将延迟环节线性化后,再设计增益自调整的自适应控制律.但是,这些研究尚存在两个缺陷,一是Pade和Taylor近似均产生右半平面零点,引入非最小相位部分,这部分在设计内模控制的逆控制器时往往也被摒弃;二是线性近似表达式的系数取定值未能反映时变延迟的特性,限制了跟踪精度的提高.全极点近似方法将延迟环节分母进行Taylor展开,可避免产生右半平面零点,不会出现非最小相位部分[20],可直接用于逆控制器的设计.迄今,全极点近似尚未用于内模控制器的设计.Kalman滤波算法简单、高效且易于实现,被广泛应用于各种有噪声的参数估计问题[21].
本文首先建立线控转向系统的转向执行机构动力学模型与延迟环节模型,然后设计自适应内模控制框架中的线性近似名义模型、逆控制器和Kalman滤波辨识算法;提出采用全极点近似方法近似延迟环节,将线性近似延迟模型与线控转向系统模型相结合,为被控对象构建新的含有延迟项的名义模型;引入Kalman滤波方法辨识名义模型参数,据此设计自适应内模控制律,从而适应时变延迟对控制性能的影响,与采用线性近似模型的自适应内模控制相结合,既降低算法的复杂度,又可提高具有时变延迟的线控转向系统的转角跟踪精度.MATLAB/Simulink仿真给出不同延迟作用下线控转向系统的转角跟踪性能,与逆控制器未计入延迟的传统内模控制,比例、积分、微分(PID)控制分别进行比较.最后,开展台架试验,并比较这3种方法的跟踪性能.本文为含有延迟的线控转向等遥操作系统的控制提供了理论依据.
1 线控转向系统建模
在线控转向系统中,转向执行系统接收线控转向系统控制器发出的扭矩指令并执行.从控制器发出扭矩指令到转向执行系统开始执行该扭矩指令之间存在延迟.延迟主要源于3个因素,其一为通信延迟,其二为转向执行系统间隙、摩擦相关的机械延迟,其三为传感器信号的采集与处理延迟.这些因素对线控转向系统的影响可以归结为对扭矩指令的响应延迟.因此,本节建模分为转向执行系统模型和延迟环节模型,二者串联组成被控对象模型.
1.1 转向执行系统模型
前轮转向执行系统主要由转向执行电机和齿轮齿条转向器组成,如图1所示.其中:xr为转向器齿条的位移;Mm为转向电机输出力矩.

图1 转向执行系统物理模型Fig.1 Physical model of steering execution system
转向执行系统的动力学方程如下[22]:
(1)
式中:mr为齿轮齿条转向器的质量;Cr为转向器齿条的阻尼系数;gm为转向电机的减速比;rp为转向小齿轮的分度圆半径;Fr为左右前轮施加齿条上的转向阻力;δf为前轮转角;K为梯形转向机构前轮转角到齿条位移的比例系数.

(2)
式中:a11、a12为阻力系数.
定义转向执行系统的控制输入u=Mm,输出y=δf,对式(1)和(2)进行拉氏变换,经推导可得从输入u(s)到输出y(s)的传递函数为

(3)

(4)
式中:s为微分算子.
1.2 延迟环节模型
延迟τ使得转向电机扭矩被延迟执行.令转向电机扭矩指令为Mmc,式(1)中的转向电机扭矩Mm由下式表示:
Mm(t)=Mmc(t-τ)
(5)
式中:t为时间.
延迟环节的传递函数为

(6)
应用一阶全极点近似方法[20]对式(6)进行近似可得:
(7)
1.3 线控转向系统模型
将延迟环节模型(见式(6))与线控转向执行系统模型(见式(3))串联,获得考虑延迟的被控对象系统的传递函数如下,其中a20、a21、b20为被控对象的模型参数.
(8)
2 自适应内模控制器

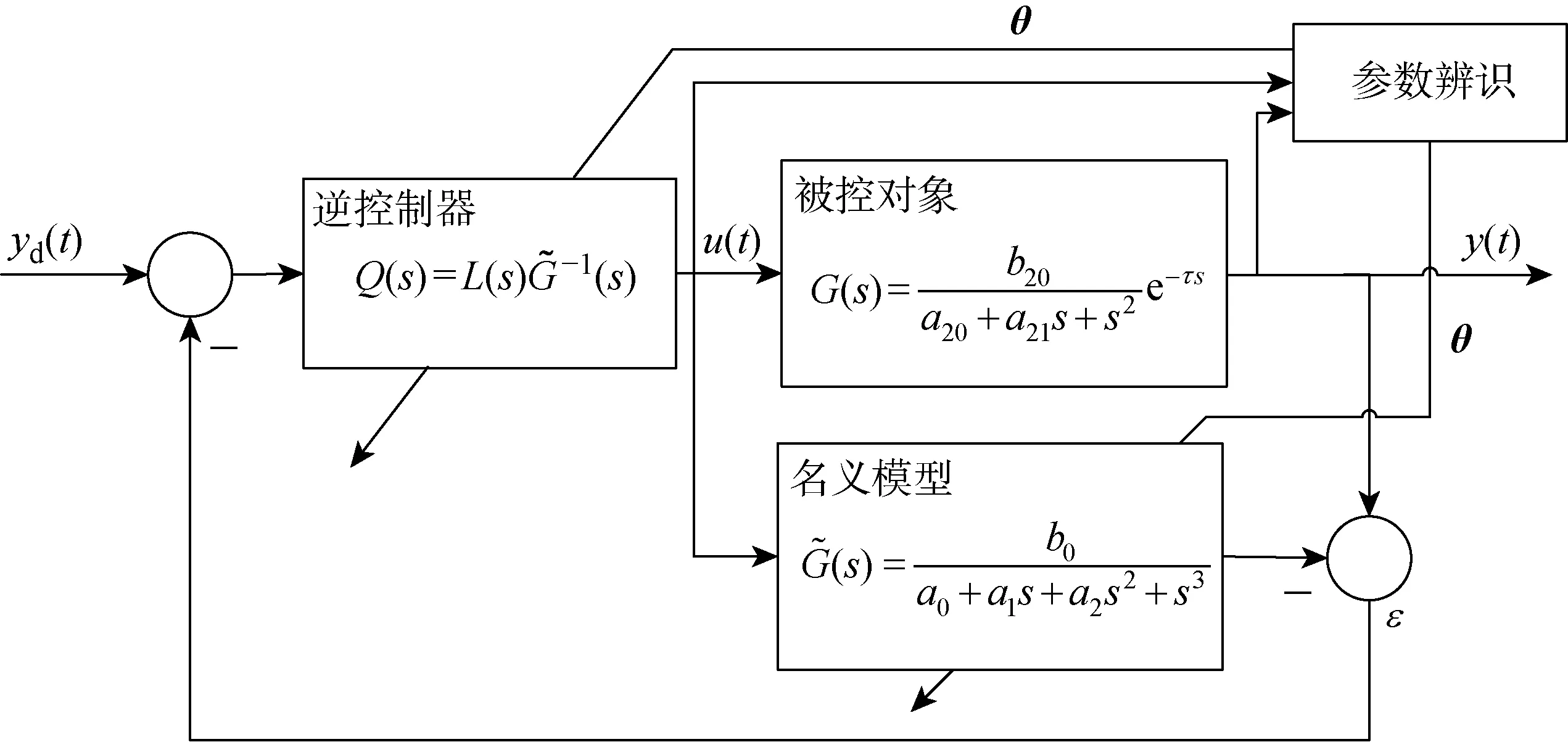
图2 自适应内模控制框图Fig.2 Block diagram of adaptive internal model control
2.1 名义模型
将式(7)代入式(8),可得含延迟的线控转向系统线性近似名义模型为
(9)
(10)
该模型具有线性系统的表达形式,便于逆控制器中的求逆运算,可见延迟τ能够改变传递函数的系数.
2.2 逆控制器
逆控制器Q(s)按如下设计:
(11)
(12)
低通滤波器L(s)按如下设计:

(13)
式中:λ为滤波器时间常数,用于调节跟踪控制性能;n为正整数,用于补偿逆控制器Q(s)的相对阶,使逆控制器可实现.
2.3 参数辨识
式(9)的线性近似模型可表达如下:
z=φTθ
(14)

(15)
(16)
式中:Λ(s)=(s+λ1)3为Hurwitz多项式,λ1为参数辨识滤波器常数;1/Λ(s)是为了避免在参数辨识中出现求导而引入的滤波器[25].
令采样周期为Δt,在第k个采样时刻,参数θ(k)的离散状态空间表达式为
(17)
(18)
式中:w(k)为过程噪声,e(k)为测量噪声,二者均假设为高斯白噪声;R1为w(k)的协方差矩阵;R2为e(k)的协方差;E为数学期望.
在第k个采样时刻,Kalman滤波算法的迭代式可表示为
(19)

3 仿真结果
在MATLAB/Simulink软件中进行仿真,参数如表1所示.其中:P0为初始参数协方差矩阵;Δt为采样周期.本文提出的AIMC与传统IMC以及PID控制的结果相比较,传统IMC方法中名义模型含延迟环节,但在逆控制器设计中未对延迟环节求逆,传统PID方法针对含延迟的被控对象实施PID反馈控制.3种控制策略中,被控对象的参数一致,都来自由台架试验获得的输入输出数据并进行离线参数辨识获得.传统PID控制的比例、积分、微分增益分别为0.1、0.2、0.01.

表1 仿真参数设置Tab.1 Parameters of simulation setting
以幅值为10、周期为10 s的方波模拟左右反复转向作为参考输入,考虑实际传感器测量值存在噪声,在系统输出中加入信噪比为3%的白噪声.τ=50、100 ms的仿真结果分别如图3和4所示,其中Ref为参考信号.每组图给出了转向执行电机力矩、名义模型与被控对象输出的误差(即模型误差)、转向角历程、转向角跟踪误差以及在线辨识的参数值.对线控转向控制系统的转角跟踪性能,从转向执行时间、跟踪稳定时间以及跟踪超调角度3个方面对转向角跟踪控制进行评价.仿真结果的评价指标如表2所示.其中:t1为转向执行时间,指实际转角从开始变化到第一次达到目标转角的时间;t2为跟踪稳定时间,指实际转角从开始变化到不超过终值2%的时间;ω为跟踪超调角度,指实际转角超过目标角度的最大值.

图3 τ=50 ms时的仿真结果Fig.3 Simulation results at τ=50 ms
由表2和图3(d)可知,当τ=50 ms时, AIMC的转向执行时间最长为0.85 s,而IMC与PID控制的转向执行时间分别为0.58、0.48 s.但AIMC的稳定时间最短,仅为1.06 s, 而IMC与PID控制的稳定时间分别为1.33、3.63 s.此外,AIMC的跟踪超调角度最小,仅为0°,而IMC与PID控制的跟踪超调角度分别为0.535°和2.694°.AIMC的控制性能较好得益于其模型误差较小(见图3(b)),AIMC的名义模型与被控对象输出的误差明显小于IMC.在AIMC的设计中有两点为减少模型误差做出了贡献,其一是名义模型中考虑了延迟环节,其二是系统模型的参数通过在线辨识获得.参数辨识的结果如图3(e)~3(h)所示.参考转角发生阶跃变化引起系统响应的瞬时变化,进而导致参数辨识的结果也发生相应的变化,但每次阶跃之后的参数辨识都能快速收敛,使AIMC获得良好的系统性能.传统IMC虽然对模型误差具有稳健性,但由于其名义模型存在误差,模型误差较大使得跟踪误差也较大.传统PID控制采用固定增益,为了尽快跟踪阶跃信号,PID控制的转向执行电机力矩最大(见图3(a)),其转向执行时间最短,但也因此引起了较大的超调角和震荡,进而导致稳定时间有所延长.

表2 仿真结果Tab.2 Simulation results
由图4(d)和表2可知,当τ=100 ms时,与τ=50 ms时相比,AIMC的转向执行时间略缩短为0.64 s,跟踪稳定时间为1.24 s,略有所延长.跟踪超调角度虽然增大到了0.011°,但都远小于其他两种控制器的结果.由此可见,即使延迟时间增大为2倍,转向角跟踪控制的性能基本保持不变,体现了AIMC对延迟变化的自适应能力.相较于传统IMC和PID控制,与τ=50 ms时的情况类似,AIMC的转向执行时间最长,IMC为0.55 s,PID控制为0.45 s;但是AIMC的稳定时间最短,IMC为1.8 s,PID控制为4.88 s.此外,AIMC的跟踪超调角度最小,IMC为1.715°,PID控制为3.167°.综上所述,与τ=50 ms时的情况相比,传统IMC和传统PID控制的性能指标发生了较大变化,反映了对延迟变化的适应能力不足.

图4 τ=100 ms时的仿真结果Fig.4 Simulation results at τ=100 ms
4 台架试验结果
基于快速控制原型设备建立线控转向试验平台,如图5所示.试验平台由某国产乘用车型实车前桥转型机构、dSPACE MicroAUTOBOX快速控制原型设备、转向执行电机、电机控制器、dSPACE ControlDesk开发主机、位移传感器、电源等组成.直流稳压电源给电机驱动提供13.5 V电源,为传感器提供5 V电源.位移传感器测量转向机构齿条的位移,可根据式(1)转换成前轮转角.本文提出的控制策略首先在MATLAB/Simulink中实现,然后由dSPACE ControlDesk软件编译并下载至dSPACE MicroAUTOBOX快速控制原型,采集位移传感器信息,并通过控制器局域网络(CAN)总线将转向电机输出力矩指令发给电机控制器, CAN的发送周期为10 ms.

图5 线控转向试验台架Fig.5 Steer-by-wire test bench
试验中,延迟主要有3个来源,通信延迟、机械延迟和数据采集与处理延迟.其中,机械延迟反映在转向系统的被控对象模型中,参数可通过离线辨识获得.被控对象模型参数与仿真匹配如表1所示,但是受温度、湿度、使用寿命等影响,被控对象模型参数会发生一定程度的变化.数据采集与处理延迟会随着采集硬件和处理算法而变化.通信延迟与通信周期和网络负荷有关,后两者可以通过给τ赋值进行模拟.首先,未施加额外延迟,即τ= 0 ms,试验结果如图6所示.然后,额外施加100 ms延迟,即τ=100 ms,试验结果如图7所示.所提AIMC和传统IMC、传统PID控制的对比结果如图6和7所示.试验中的控制性能指标如表3所示.

图7 τ=100 ms时的台架试验结果Fig.7 Bench test results at τ=100 ms

表3 试验结果Tab.3 Test results
由图6(a)可知,当没有额外施加延迟时,AIMC的转向执行电机力矩均小于传统IMC和PID控制的转向执行电机力.由图6(d)可知,AIMC的转向执行时间最长为 0.44 s,而传统IMC和PID控制的转向执行时间分别为 0.43 s 和 0.30 s;AIMC的稳定时间最短为 0.77 s,而传统IMC和PID控制的稳定时间分别为 0.84 s 和 4.60 s.此外,AIMC的跟踪超调角度最小为0.658°,而传统IMC和PID控制的跟踪超调角度分别为1.241° 和2.123°.因此,AIMC利用较小的转向执行电机力矩获得了比传统IMC和PID控制更高的跟踪精度.
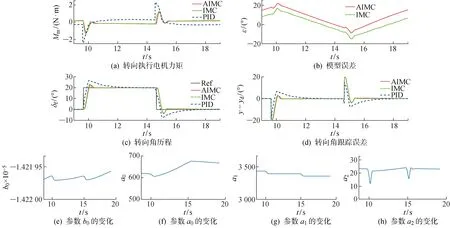
图6 τ=0 ms时的台架试验结果Fig.6 Bench test results at τ=0 ms
由图7(c)可知,当额外施加100 ms延迟时,AIMC和PID控制都能实现跟踪,但传统IMC发生了震荡甚至发散.比较图7(d)和图6(d)可知,受额外延迟增大的影响,AIMC转向延迟时间为0.45 s,有微小增加,稳定时间为1.21 s也有所增加;跟踪超调角度为1.487°,增大了1倍.同时,传统IMC和PID控制受到更明显的影响,传统IMC无法实现稳定,超调角达到8.941°,增长了约12倍;PID控制的超调角度达到10.172°,增长了约5倍.试验结果表明,AIMC对实际变化后的不同延迟具有适应性,跟踪性能优于传统IMC和PID控制.
5 结语
本文在考虑线控转向系统中存在未知、时变延迟的情况下,提出采用全极点近似方法,将线性近似的延迟环节与线控转向系统模型相结合,为被控对象构建新的线性近似名义模型.引入Kalman滤波方法实时辨识名义模型参数,并据此设计自适应内模控制律.不同延迟时间下的仿真、台架试验结果均表明,所提自适应内模控制比传统内模控制和PID控制的跟踪精度高、稳定时间短,且对不同延迟的适应能力强.
